
Тема 3.5 Гибкие производственные системы и гибкие производственные модули1. Основные термины и определения ГПС 2. Гибкие автоматизированные линии 3. Управление ГПС 4. Современные тенденции в использовании ГПС
1. Гибкая производственная система (ГПС) представляет собой совокупность в разных сочетаниях оборудования с ЧПУ, роботизированных технологических комплексов, гибких производственных модулей, отдельных единиц технологического оборудования и систем обеспечения их функционирования в автоматическом режиме в течение заданного интервала времени. Любая ТПС обладает свойством автоматизированной переналадки при производстве изделий произвольной номенклатуры в установленных пределах значений их характеристик. Роботизированный технологический комплекс (РТК) состоит из единицы технологического оборудования, промышленного робота и средств оснащения (устройств накопления, ориентации и поштучной выдачи изделий). РТК может функционировать автономно, осуществляя многократно циклы обработки. Если РТК предназначены для работы в составе ГПС, то они должны иметь автоматизированную переналадку и возможность встраивания в систему. Гибкий производственный модуль (ГПМ) — это единица технологического оборудования для производства изделий произвольной номенклатуры в установленных пределах значений их характеристик, автономно функционирующая, автоматически осуществляющая функции, связанные с производством изделий, и имеющая возможность встраивания в ГПС. По организационным признакам можно выделить 3 разновидности ГПС: ТАЛ, ГАУ и ГАЦ. 1) Вгибкой автоматизированной линии (ГАЛ) технологическое оборудование расположено в принятой последовательности технологических операций. 2) Гибкий автоматизированный участок (ГАУ) функционирует по технологическому маршруту, в котором предусмотрена возможность изменения последовательности использования технологического оборудования. 3) В состав гибкого автоматизированного цеха (ГАЦ) входят в различных сочетаниях гибкие автоматизированные линии, роботизированные технологические линии, гибкие автоматизированные участки и роботизированные технологические линии и участки для производства изделий заданной номенклатуры. Таким образом, ГПС — это организационно-техническая производственная система, позволяющая в условиях мелкосерийного, серийного и в отдельных случаях крупносерийного многономенклатурного производства заменить с минимальными затратами и в короткий срок выпускаемую продукцию на новую. В структуре типовой ГПС необходимы три группы компонентов: технологическая, управления и подготовки производства. Каждая из указанных групп компонентов, образующих соответствующую систему (или подсистему), является человеко-машинной, в которой наиболее трудоемкие функции выполняются входящими в систему средствами вычислительной техники, а творческие функции — конструкторами, технологами и организаторами производства, работающими на АРМ. Технологическая система представляет собой совокупность основного и вспомогательного технологического оборудования и реализованного на нем технологического производственного процесса, который может быть механообрабатывающим, сборочным, литейным, кузнечнопрессовым, сварочным, гальваническим и т. д. Производственные функции выполняются с помощью специфических для каждого вида производства технических средств, построенных на модульной основе. При этом решаются следующие задачи: комплектация, складирование, транспортирование и промежуточное накопление исходного материала, заготовок, полуфабрикатов и технологической оснастки; обработка и сборка объектов производства; контроль заготовок, полуфабрикатов и готовой продукции; контроль параметров технологического процесса и состояния инструмента, уборка отходов производства (стружки, облоя, литников); подача вспомогательных материалов (смазочного материала, охлаждающей жидкости, формовочных материалов). Производственная гибкость ГПС определяется технологической, структурно-организационной и параметрической гибкостью. При этом под гибкостью понимают приспосабливаемость ГПС к изменениям, связанным с выполнением производственной программы. Производственная система считается гибкой и быстропереналаживаемой без существенных затрат, если при изменении объектов производства не меняется состав компонентов системы и состав информационных связей.
2. Обычно станочные автоматические линии, созданные для обработки одной конкретной детали, очень сложно использовать для обработки новой детали, даже аналогичной по конструкции. Принципиально новые средства автоматизации, появившиеся в виде ГПС, позволили создать для таких производств гибкие автоматизированные линии (ГАЛ). ГАЛ предназначены для групповой обработки нескольких заранее известных аналогичных по конструкции и технологии изготовления деталей. Они состоят из переналаживаемых агрегатных станков и станков с ЧПУ, объединенных единой автоматической транспортной системой Станки с ЧПУ используют в таких линиях при сложных циклах обработки и при необходимости реализовать контурное управление. Технологическое оборудование ГАЛ расположено в принятой последовательности технологических операций. Широкое распространение получили ГАЛ, создаваемые на базе агрегатных станков со сменными шпиндельными коробками для обработки корпусных деталей.
Также большее применение находят в ГАЛ для обработки деталей типа тел вращения и корпусных деталей агрегатные станки с ЧПУ, создаваемые из комплектов унифицированных узлов (столов различных типов, механизмов автоматической смены инструмента).
3. Управление ГПС реализует комплексные многофункциональные иерархически построенные автоматизированные системы управления (АСУ), в которых можно выделить две функциональные составные части: - управления технологическими процессами (АСУТП) - организационно- - технологического управления (АСУОТ). Первая решает задачи группового управления технологическим и транспортным оборудованием, а вторая – задачи планирования, диспетчеризации и учета хода производства. Обе составные части АСУ ГПС тесно взаимосвязаны между собой как аппаратными, так и программными средствами. АСУ ТП предназначена для выработки управляющих воздействий на комплексы (группы) основного и вспомогательного оборудования ГПС, передачи управляющих программ и другой требуемой информации в устройства локального управления (системы ЧПУ оборудованием, устройства электроавтоматики), приема информации от устройств локального управления, а также для организации хранения в памяти ЭВМ библиотеки управляющих программ и всей необходимой технологической документации. В состав АСУ ТП входят модули локального управления, средства информационно-измерительной и вычислительной техники. В ГПС программное управление обеспечивает функционирование оборудования в автоматическом режиме в соответствии с заданной программой и возможность изменения процессов функционирования при смене программы. Главная проблема, возникающая при разработке системы группового управления оборудования ГПС – обеспечение взаимодействия устройства локального управления с ЭВМ. Решение этой проблемы связано с унификацией и стандартизацией программно-аппаратных интерфейсов (физического, логического и информационного). Физический интерфейс определяет способ электрического и механического сопряжения ЭВМ и локальных устройств управления. Логический интерфейс определяет способ передачи информации (протокол обмена информацией) по каналу связи: способ установления и прекращения сеансов связи, размер передаваемых сообщений. Информационный интерфейс определяет состав и формат передаваемых по каналу связи сообщений, т.е. язык информационного обмена между ЭВМ и локальными устройствами управления.
4. ГПС находят применение в основном в станкостроении, машиностроении. Анализ ГПС позволяет сделать некоторые выводы: · управление транспортными системами и работой станков осуществляется одной или несколькими отдельными ЭВМ; · число станков в ГПС колеблется от 2 до 50. Однако 80% ГПС составлено из 4-5 станков и 15% из 8 – 10; · реже встречаются системы из 30-50 станков (2-3%); · наибольший экономический эффект от использования ГПС достигается при обработке корпусных деталей, нежели от их использования при обработке других деталей, например деталей типа тел вращения. Например в Германии их 60%, в Японии – более 70, в США – около 90%; · различна и степень гибкости ГПС. Например в США преобладают системы для обработки изделий в пределах 4-10 наименований, в Германии – от 50 до 200; · нормативный срок окупаемости ГПС в различных странах 2 - 4, 5 года. Проблемы, возникшие при применении гибких систем: · ГПС не достигла поставленных целей по рентабельности; она оказалась слишком дорогостоящей по сравнению с преимуществами, достигнутыми с ней. Обнаружено, что причиной высокой стоимости оборудования были несоразмерные расходы на приспособления и транспортную систему; · разработка и введение в эксплуатацию комплексной ГПС оказалось трудным, а также дорогостоящим; · из-за недостатка опыта было трудно выбирать подходящие типы систем и оборудование для нее; · имеется мало поставщиков систем, которые могут поставлять сложные системы. · в некоторых случаях эксплуатационники получили опыт о фактически слабой гибкости; · конструктивные элементы ГАПС, например, станки, системы управления и периферийные устройства часто оказывались неподходящими к системе и вызывали лишние проблемы по стыковке. · Эксплуатационники часто не имеют достаточной готовности к эксплуатации сложной системы; · Длительный срок выполнения проекта от конструирования до запуска системы. Перспективы применения гибких систем · одновременное повышение эффективности и гибкости; · повышение степени автоматизации не уменьшая гибкости; · усовершенствование таких измерительно-контрольных методов, которые контролируют в процессе обработки состояние инструмента и обрабатываемых деталей, необходимое для соответствующей автоматической подналадки; · уменьшение количества приспособлений и палет за счет автоматизации крепления деталей; · введение в ГПС таких операций, как промывка, покрытие, термообработка, сборка и т.д; · развитие профилактического техобслуживания. Значение ГПС · более высокий коэффициент использования станков (в 2-4 раза больше по сравнению с применением отдельных станков); · более короткое время прохода производства; · уменьшается доля незаконченного производства, т.е. уменьшается количество запасов деталей на складах, которое означает уменьшение продукции, привязанного к производству; · более ясный поток материала, меньше перетранспортировок и меньше точек управления производством; · уменьшаются расходы на заработную плату; · более ровное качество продукции; · более удобная и благоприятная обстановка и условия работы для работающих.
|

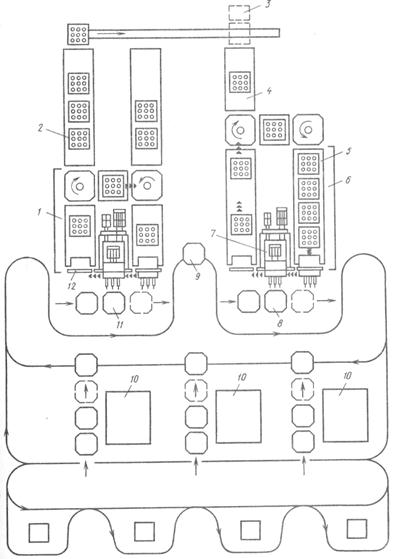 На рисунке 43 показан пример такой линии, в состав которой входят: два комплекта унифицированных узлов 1 и 6 для механообработки, две автоматически действующие секции конвейеров шпиндельных коробок 2 и 4, стеллаж 3 для складирования не используемых в заданном цикле работы шпиндельных коробок, три позиции 10 установки заготовок на зажимные приспособления-спутники, транспортная система автоматической подачи деталей со спутниками на рабочие позиции 11 и 8 (позиция 9 для промежуточного контроля деталей). Комплекты унифицированных узлов имеют силовой стол с редуктором 7 для крепления сменных шпиндельных коробок 5, устройство подачи к силовому столу шпиндельных коробок 12, набор секций конвейеров и поворотных столов. На линии используется до 28 многошпиндельных коробок, которые на спутниках транспортируются в нужный период цикла обработки к силовому узлу, где поочередно автоматически закрепляются. При переналадке новый комплект коробок загружается ни конвейер со склада.
На рисунке 43 показан пример такой линии, в состав которой входят: два комплекта унифицированных узлов 1 и 6 для механообработки, две автоматически действующие секции конвейеров шпиндельных коробок 2 и 4, стеллаж 3 для складирования не используемых в заданном цикле работы шпиндельных коробок, три позиции 10 установки заготовок на зажимные приспособления-спутники, транспортная система автоматической подачи деталей со спутниками на рабочие позиции 11 и 8 (позиция 9 для промежуточного контроля деталей). Комплекты унифицированных узлов имеют силовой стол с редуктором 7 для крепления сменных шпиндельных коробок 5, устройство подачи к силовому столу шпиндельных коробок 12, набор секций конвейеров и поворотных столов. На линии используется до 28 многошпиндельных коробок, которые на спутниках транспортируются в нужный период цикла обработки к силовому узлу, где поочередно автоматически закрепляются. При переналадке новый комплект коробок загружается ни конвейер со склада.


