Короткі теоретичні положення. Датчики кутової швидкості обертального руху - тахогенератори використовуються для живлення таховольтметровДатчики кутової швидкості обертального руху - тахогенератори використовуються для живлення таховольтметров, що вказують миттєве значення швидкості, для підключення до вхідних кіл регуляторів, а також для урахування кількості оборотів або шляхи. У системі автоматичного керування (мал. 1) тахогенератори є складеною ланкою контуру зворотного зв'язку по швидкості. На деяких приводах (наприклад, на контрольних роликах, пересувних машинах, пристроях з муфтами ковзання) тахогенератор приєднується не до двигуна, а до робочого вала механізму. Ідеальним є такий тахогенератор, у якого величина вихідної напруги Uв строго лінійно пропорційна величині кутової швидкості nД двигуна Uв = Застосовувані в промисловості реальні ТГ усіх систем, як звичайні машини, характеризуються поруч технічних показників і мають різні погрішності, через які порушується чітка пропорційність між величинами швидкості і вихідної напруги. Вибір типу ТГ у багатьох випадках може визначатися додатковими показниками, до яких відносяться: а) способи зчленування ТГ із двигуном; б) габарити, зручність монтажу і демонтажу при ремонтах; в) характер обслуговування, зв'язаний з типом і конструкцією машини (наявність колектора, підшипників, регулятора струму порушення); г) стабільність (
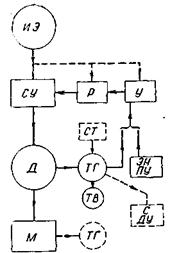
Рис. 1. Структурна схема керованого електропривода зі зворотним зв'язком по швидкості. ДЕ - джерело енергії; СП - силовий керуючий пристрій; Д - двигун; М - механізм; ТГ - тахогенератор; Р - регулятор; П - підсилювач; ЕН, ПП - еталонна напруга або програмуючий пристрій; Р, ДУ – рахунковий пристрій або пристрій, що диференціює; ТВ – таховольтметр
Різні способи приєднання тахогенераторів відповідно до їх переважного використання можуть бути перераховані в наступному порядку: 1. З'єднання вала тахогенератора з валом двигуна через напівтверду муфту. 2. Передача руху від вала двигуна до вала ТГ через зубчасту передачу. 3. З'єднання валів двигуна і тахогенератора за допомогою клиноременной передачі. 4. Тверде кріплення ротора (якоря) тахогенератора на кінці вала двигуна, тверде закріплення статора (корпуса) тахогенератора на кришці двигуна; у цих конструкціях тахогенератор не має своїх підшипників. 5. Тверде кріплення ротора (якоря) тахогенератора на валові двигуна. Статор (корпус) тахогенератора спирається на шарикові підшипники, що сидять на валові, і утримується від провертання. Більш детальний опис конструктивних особливостей тахогенераторів постійний і перемінний токи, впливи навантаження і способів їхнього приєднання в схемах електроприводів на формовану погрішність можна знайти в (1, 2, 3)
|
 . Це співвідношення не повинне залежати від пристрою зчленування, характеру навантаження, температури й інших зовнішніх факторів.
. Це співвідношення не повинне залежати від пристрою зчленування, характеру навантаження, температури й інших зовнішніх факторів. )або зміна вихідної напруги з часом (унаслідок зміни магнітних властивостей матеріалів, зміни повітряних зазорів при спрацьовуванні підшипників і інших факторів).
)або зміна вихідної напруги з часом (унаслідок зміни магнітних властивостей матеріалів, зміни повітряних зазорів при спрацьовуванні підшипників і інших факторів).