
Характеристики двигателей постоянного тока. Обычно рассматривают три основные характеристики двигателей постоянного тока:Обычно рассматривают три основные характеристики двигателей постоянного тока: - скоростную характеристику, - характеристику момента, - механическую характеристику. Все характеристики, отражающие взаимосвязь между током якоря, механическим моментом на валу двигателя и частотой вращения якоря зависят от способа возбуждения двигателя, поэтому они рассматриваются отдельно для каждой схемы возбуждения двигателя. 3.4.1. Характеристики двигателей с независимым Характеристика скорости Скоростной характеристикой называют зависимость частоты вращения якоря от тока якоря двигателя Для получения функциональной зависимости скорости вращения якоря от тока воспользуемся уравнением электрического равновесия двигателя
Из этого уравнения получаем выражение для частоты вращения
В полученной формуле от тока якоря зависят две составляющие: произведение R я I яи результирующий магнитный поток машины
Произведение R я I я, равное падению напряжения на сопротивлении цепи якоря, приводит к пропорциональному уменьшению частоты вращения при увеличении тока якоря. Магнитный поток машины при увеличении тока якоря из-за реакции якоря несколько уменьшается. Эта зависимость магнитного потока от тока якоря нелинейная, поэтому и скоростная характеристика двигателей с независимым и параллельным возбуждением нелинейная (рис. 3.4). В зависимости от соотношения влияния на частоту вращения падения напряжения R я I я и изменения магнитного потока двигателя характеристика скорости может иметь различный вид. На рис. 3.4 кривая 1 представляет собой характеристику скорости двигателя, у которого влияние R я I я преобладает перед влиянием потока Чаще всего встречаются двигатели, у которых уменьшение частоты вращения за счет падения напряжения на сопротивлении цепи якоря преобладает перед влиянием реакции якоря, приводящей к уменьшению магнитного потока. Характеристика момента Характеристикой момента называют зависимость механического момента на валу двигателя от тока якоря Ток якоря ненагруженного двигателя не равен нулю. Это объясняется наличием потерь в двигателе, работающем без нагрузки. Такой ток называется током холостого хода I яодвигателя. Используя ранее полученную формулу для определения механического момента на валу двигателя, получаем для двигателя, работающего в режиме холостого хода, формулу: Нагруженный двигатель при токе якоря I я развиваетмеханический момент Механический момент на выходе двигателя равен разности электромагнитного момента и момента холостого хода
При неизменной величине магнитного потока Особый интерес представляет график зависимости КПД машины от тока якоря (см. рис. 3.5). КПД равен нулю при токах, меньших тока холостого хода или тока трогания (М 2 = 0 и Р 2 = 0). При дальнейшем увеличении тока КПД увеличивается и достигает максимального значения при токе якоря, равном примерно 0, 75 I ян. При больших токах КПД начинает уменьшаться. КПД двигате- Механическая характеристика Основной характеристикой двигателя постоянного тока является механическая характеристика. Механической характеристикой называют зависимость частоты вращения якоря n от механического момента на валу двигате- Особую роль играет механическая характеристика двигателя при номинальном напряжении питающей сети U = U н = const и номинальном токе возбуждения I в = I вн = const. Такую механическую характеристику называют естественной. Рассматривают и другие механические характеристики, выражающие ту же зависимость Найдем аналитическое уравнение, описывающее механическую характеристику. В уравнении электрического равновесия Обозначим Полученное уравнение является уравнением прямой линии. Уравнение состоит из двух слагаемых. Первое слагаемое не зависит от момента, а второе слагаемое прямо пропорционально механическому моменту М. Очевидно то, что механическая характеристика (рис. 3.6) двигателя постоянного тока выражается прямой линией. Такую прямую можно провести через две точки, положение которых на графике можно найти следующим образом: в режиме идеального холостого хода момент двигателя равен нулю
Рис. 3.6
Это первая точка механической характеристики. Положение другой точки определяется из условий пуска двигателя. При подключении двигателя в сеть в начальный момент времени из-за инерционности якоря частота вращения равна нулю n= 0. Противо-ЭДС обмотки якоря тоже равна нулю, и тогда приложенное напряжение падает только на сопротивлении якорной цепи. Ток якоря в этом случае достигает больших величин из-за малости R я. Его называют пусковым током I яп. Сила пускового тока определяется из уравнения
Механический момент, развиваемый двигателем, в этом случае называют пусковым моментом М п , и его величина определяется формулой
Общий вид естественной механической характеристики показан на рис. 3.7. Двигатели с параллельным возбуждением имеют пусковой момент в 10…20 раз больше номинального, поэтому рабочая часть механической характеристики, ограниченная режимом холостого хода (М = 0) и номинальным значением момента на валу
|
 при постоянном напряжении питания U = const, равном номинальному напряжению, и постоянном токе возбуждения I в = const.
при постоянном напряжении питания U = const, равном номинальному напряжению, и постоянном токе возбуждения I в = const. .
. .
. .
. Рис. 3.4
Рис. 3.4
 при постоянном номинальном напряжении питания U = U н = const и при постоянном номинальном токе возбуждения I в = I вн = const.
при постоянном номинальном напряжении питания U = U н = const и при постоянном номинальном токе возбуждения I в = I вн = const. .
. . Этот развиваемый момент называют электромагнитным.
. Этот развиваемый момент называют электромагнитным. .
.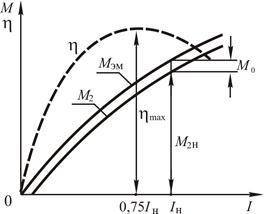 Рис. 3.5
Рис. 3.5
 и
и  являются прямыми линиями. Однако магнитный поток машины несколько уменьшается при увеличении тока якоря I я из-за реакции якоря, поэтому характеристики
являются прямыми линиями. Однако магнитный поток машины несколько уменьшается при увеличении тока якоря I я из-за реакции якоря, поэтому характеристики  не являются прямолинейными (рис. 3.5). Максимальное значение тока якоря, при котором якорь ненагруженного двигателя (М 2 = 0) начинает вращаться, называют током трогания. Электромагнитный момент в этом случае равен моменту холостого хода.
не являются прямолинейными (рис. 3.5). Максимальное значение тока якоря, при котором якорь ненагруженного двигателя (М 2 = 0) начинает вращаться, называют током трогания. Электромагнитный момент в этом случае равен моменту холостого хода. . В дальнейших рассуждениях будем предполагать, что электромагнитный момент равен механическому моменту на выходе двигателя
. В дальнейших рассуждениях будем предполагать, что электромагнитный момент равен механическому моменту на выходе двигателя  .
. , но при других условиях работы, т. е. при других значениях напряжения, при других токах возбуждения и при различных сопротивлениях реостатов, включенных последовательно с якорем. Такие механические характеристики называют искусственными.
, но при других условиях работы, т. е. при других значениях напряжения, при других токах возбуждения и при различных сопротивлениях реостатов, включенных последовательно с якорем. Такие механические характеристики называют искусственными. . ПротивоЭДС обмотки якоря
. ПротивоЭДС обмотки якоря  . Следовательно,
. Следовательно, 
 . Из полученного уравнения
. Из полученного уравнения  . Но из уравнения для определения момента
. Но из уравнения для определения момента  и
и  .
.  .
. и
и  . Можно написать
. Можно написать  .
. , и якорь вращается с частотой
, и якорь вращается с частотой  , а при номинальном напряжении
, а при номинальном напряжении  .
.
 .
.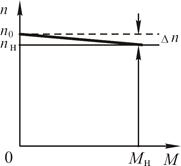 Рис. 3.7
Рис. 3.7
 .
. , занимает лишь начальную часть полной характеристики (см. рис. 3.6), в пределах которой частота вращения изменяется незначительно. Такая механическая характеристика, когда при изменении механического момента от нулевого значения до номинального значения частота вращения изменяется незначительно, называется жесткой (см. рис. 3.7). Величина
, занимает лишь начальную часть полной характеристики (см. рис. 3.6), в пределах которой частота вращения изменяется незначительно. Такая механическая характеристика, когда при изменении механического момента от нулевого значения до номинального значения частота вращения изменяется незначительно, называется жесткой (см. рис. 3.7). Величина  весьма невелика.
весьма невелика.


