
Двигатели постоянного тока с независимым возбуждениемВыражение механической динамической характеристики электродвигателя постоянного тока получим из уравнения равновесия электродвижущих сил в цепи
якоря (ротора) вращающейся машины: Uc = ед + i(R + Lp) + ∆Uщ, (3.1) где Uпит - напряжение источника питания (например: питающей сети); ∆Uщ – падение напряжения на щетках; ед - противо-ЭДС двигателя; L и R – индуктивность и активное сопротивление обмотки якоря (ротора); р – оператор дифференцирования. В установившихся режимах работы двигателя (производная равна нулю) уравнение (3.1), пренебрегая падением напряжения на щетках, примет вид: Uпит = Eд + IR (3.2) Значения ЭДС и электромагнитного момента двигателя находятся по формулам Е = кФω, (3.3) М = кФI, (3.4) где к – конструктивный коэффициент двигателя (к = pN/2πa) p – число пар полюсов; N – число активных проводников обмотки якоря; а - число параллельных ветвей обмотки якоря; Ф – магнитный поток одного полюса.
Запишем уравнение (3.2), учитывая (3.3) и (3.4), решив его относительно скорости ω Это уравнение называют статической механической характеристикой. При записи уравнения (3.5) считаем, что двигатель снабжен дополнительными полюсами и компенсационной обмоткой, в результате чего скомпенсировано влияние якоря; сопротивление якорной цепи R не зависит от протекающего тока (от нагрева); магнитный поток, пронизывающий обмотку якоря постоянен. Параметры и координаты, входящие в состав уравнения механической статической характеристики позволяют видеть от каких величин и каким образом зависит положение этой характеристики. Уравнение (3.5), записанное при номинальных паспортных данных двигателя, называется естественной механической характеристикой. Естественная механическая характеристика двигателя дает представление об электромеханических свойствах двигателя. Она определяет его рабочую (номинальную) скорость и показывает, как изменяется скорость ЭП при изменениях нагрузки в статических режимах работы. Чем выше модуль жесткости естественной характеристики βе (βе = к2Ф2ном/ Rя), тем более стабильна скорость ЭП при пределах изменения его нагрузки, и напротив, при малой жесткости
механической характеристики изменения рабочей скорости механизма при изменениях нагрузки могут быть значительными. Другой оценкой стабильности рабочей скорости ЭП при различных нагрузках является статизм механической характеристики двигателя. Количественной оценкой статизма может служить номинальный перепад скорости ∆ωном = ω0ном- ωном, соответствующий изменению момента двигателя от М = 0 до М = Мном. Его значения связаны с модулем жесткости механической характеристики соотношением: ∆ωном = Мном / βе. Таким образом, статизм механической характеристики обратно пропорционален модулю ее жесткости. Для управления работой двигателя производятся необходимые изменения параметров и воздействий, определяющих положение его механических характеристик. В соответствии с (3.5) такими параметрами и воздействиями являются приложенное к якорной цепи напряжение Uc, суммарное сопротивление якорной цепи Rяц, и магнитный поток машины Ф. Характеристики, соответствующие измененным параметрам двигателя или специальным схемам его включения, принято называть искусственными механическими характеристиками. 1. Изменение напряжения, подведенного к якорной обмотке двигателя при номинальном потоке, является в регулируемом ЭП постоянного тока основным управляющим воздействием. Как правило, изменение напряжение Uя возможно только в сторону уменьшения по сравнению с номинальным, причем для мощных двигателей это ограничение является жестким, так как допустимое по условиям работы коллектора повышение напряжения невелико и опасно. Как следует из (3.5), при изменении Uя пропорционально изменяется скорость идеального холостого хода двигателя, а жесткость механических характеристик при любом напряжении одинакова, поэтому механические характеристики при Uя=var имеют вид параллельных прямых, показанных на рис. 3.2. Изменение напряжения на якоре позволяет не только изменять скорость вращения, но и ограничивать ток короткого замыкания. Плавное повышение напряжения питания
двигателя от 0 до Uном обеспечивает наиболее благоприятные условия пуска двигателя.
Рисунок 3.2 – Механические характеристики двигателя с независимым возбуждением при Uя = var.
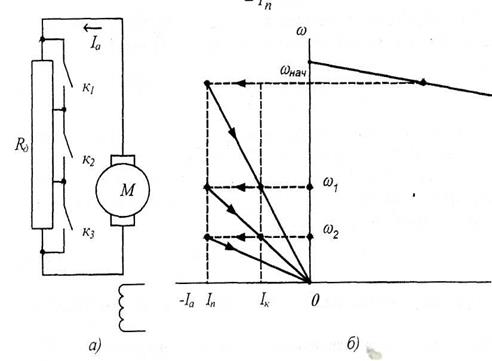
2. Искусственные характеристики, полученные путем введения добавочных резисторов в цепь якоря, называются реостатными характеристиками. Схема включения резисторов (сопротивлений) для получения реостатных характеристик представлена на рис. 3.3,а. При этом суммарное сопротивление якорной цепи увеличивается: RяΣ = Rя дв + Rдоб. Ток короткого замыкания ограничивается величиной Iк.з.= Uном/(Rя дв + Rдоб), а модуль жесткости механической характеристики уменьшается: β = k2Фном2 /(Rя дв+ Rдоб) = с2 / RяΣ. Скорость идеального холостого хода остается неизменной и равной ω0ном, а между током и моментом двигателя, если не учитывать реакцию якоря, сохраняется пропорциональность М = кФном Iя. Семейство реостатных механических характеристик представлено на рис.3.3,б. Введение резисторов в цепь якоря двигателя является простейшим средством ограничения тока при различных переходных процессах и используется для этих целей во всех случаях при питании двигателя от сети. Снижение жесткости механических характеристик заставляет уменьшать диапазон допустимого изменения момента нагрузки при одинаковом изменении скорости вращения. Введение резисторов приводит к увеличению потерь энергии в сопротивлениях на тепло. При питании двигателя от неуправляемого источника питания часто возникает необходимость использовать искусственные характеристики, например для ограничения бросков тока при пуске. С этой цельюв цепь якоря машины включают дополнительные сопротивления (рис.3.3). Механические характеристики при последовательном шунтировании добавочных сопротивлений приведены на рис.3.4. При расчете пусковых характеристик прежде всего необходимо определить пусковой момент Мп или соответствующий ему пусковой ток, а также момент переключения Мк, учитывая, что для устойчивого пуска необходимо Мк>Мс.
Рисунок 3.3 - Схема (а) и реостатные характеристики двигателя (б).
Мк – момент, соответствующий переключениям ступеней сопротивлений; Мп – пусковой момент. Рисунок 3.4 – Пусковая диаграмма двигателя.
Для выбора Мп необходимо сравнить величину допустимого момента по условиям механической прочности электромеханической системы и допустимую величину тока (момента) двигателя (приводится в справочниках) При заданном числе ступеней Мк. выбирается таким образом, чтобы на всех ступенях обеспечить постоянство Мк и Мп. При выборе числа ступеней следует учитывать, что с увеличением числа ступеней с одной стороны увеличивается количество пуско-регулирующей аппаратуры, а с другой, - увеличивается средний за время пуска динамический момент, что приводит к уменьшению времени пуска.Поскольку настройка аппаратуры выполняется по величине токов, то расчеты удобнее выполнять по электромеханической характеристике двигателя и уравнению равновесия напряжений (3.2), предварительно определив Iп = Мп / kФн и Iк = Мк / kФн. Тогда полное сопротивление цепи якоря на первой ступени будет: RΣ = Uя / Iп, где RΣ=Rя + r1 + r2 + r3. Шунтирование первой ступени сопротивления r1 должно происходить при скорости ω1 и токе Iк. Тогда из (3.2) получим:
R1 = (Uя - kФнω1) / Iп, (3.6) где R1 = Rя = r2 + r3. Сопротивления, остающиеся в цепи якоря после шунтирования остальных секций, определяются таким же образом: R2 = Uя - kФнω2 / Iп R3 = Uя - kФнω3 / Iп (3.7) Зная rя нетрудно вычислить сопротивления каждой секции. При расчете механических характеристик необходимо знать величину кФн, которая в справочниках не приводится. Эту величину просто рассчитать по уравнению (3.5) в точке номинального режима: кФн = (Uян - rяIян) / ωн (3.8) При торможении двигатель переходит в генераторный режим, преобразуя запасенную кинетическую энергию W = JΣω2/ 2 в электрическую. Однако для создания тормозного момента эту энергию необходимо вывести из ЭМС. В электроприводах с регулируемым преобразователем электрической энергии, обладающим двухсторонней энергопроводимостью, эта энергия возвращается в источник питания, т.е. обеспечивается торможение с рекуперацией энергии. Если применение более сложного реверсивного преобразователя нецелесообразно, то эта энергия преобразуется в тепловую и рассеивается в окружающую среду. В системах с нерегулируемым источником питания двигателя отдача энергии через тепловую энергию является единственным способом. Имеются еще два способа торможения: динамическое и торможение противовключением. а) При динамическом торможении цепь якоря двигателя отключается от источника питания и замыкается на сопротивление R д (рис. 3.5,а), которое может быть секционировано. В этом случае построение диаграмм и расчет сопротивлений секций выполняется как и при пуске, но с учетом что Uя = 0 и Iя < 0: Ri = - kФн ωi / - Iп = kФн ωi / Iп (3.9)
б) Противовключением называют режим, при котором якорь двигателя вращается под действием моментов, определяемых запасом кинетической или потенциальной энергии, в противоположном направлении, по сравнению с действием электромагнитного момента. При наличии реактивного статического момента торможение противовключением получают изменяя полярность напряжения на зажимах якоря, как при реверсе (рисю3.6,а) и включив в цепь якоря тормозной резистор Rпр. После переключения полярности якорь двигателя переходит из начальной точки работы 1 в точку 2 на новой механической характеристике, проходящей через точку ω0 (рис3.6,б). Благодаря изменению полярности напряжения в сети питания, ток двигателя изменяет свой знак и при работе привода во втором квандранте определяется уравнением I = - (U + E) / R, где R = rя + Rпр. При этом происходит интенсивное торможение привода благодаря действию суммарного отрицательного динамического момента Мдин = - (kФнI + Mc) < 0. (3.10) В точке 3 происходит остановка двигателя, поскольку реактивный статический момент, меняя свой знак, препятствует вращению привода в противоположную сторону. Если режим торможения противовключением осуществляется с меньшим сопротивлением Rпр, и новая механическая характеристика является лучом, проходящим через точку 4, то тормозной режим противовключения не заканчивается в точке 5. Двигатель может совершить реверс и перейти в двигательный режим работы с установившейся скоростью ωс, определяемой координатами точки 6. Для исключения реверса привода при достижении им точки 5 на механической характеристике двигатель отключают от сети и осуществляют при необходимости механическое торможение до полной остановки.
Рисунок 3.5 – Схема включения (а) и диаграмма динамического торможения (б).
Рисунок 3.6 – Схема включения (а) и механические характеристики (б) двигателя в режиме торможения противовключеснием при наличии реактивного момента.
При наличии активного статического момента нагрузки режим торможения противовключением получают без переключения полярности напряжения на зажимах якорной обмотки, а лишь введением большого добавочного сопротивления Rпр (рис.3.7,а).
Рисунок 3.7 – Схема включения (а) и механические характеристики двигателя при наличии активного статического момента (б).
Тогда под действием потенциальных сил (силы тяжести) якорь двигателя затормаживается, а затем начинает вращаться в противоположном напрвлении, и ЭДС меняет свой знак. Поэтому ток (момент) двигателя при работе его в четвертом квадранте, сохраняя прежнее направление, определяется по формуле: I = [U – (-E)] / R = (U + E) / R. Процесс перехода из двигательного режима в тормозной (противовключение) изображен на рис.3.7,б. В этом случае оказывается возможным обеспечить тормозной режим с различными скоростями ωс< 0 и полную остановку привода (точка 6), что зависит от сопротивления Rпр. Работа привода при скорости - ωс, применяемая в подъемно-транспортных механизмах, называется силовым спуском груза. Заметим, что при идентичных исходных состояния привода, определяемых точкой! и сопротивлением Rпр, процесс достижения нулевой скорости при наличии реактивного момента (точка 3 на рис.3.6,б) будет происходить значительно быстрее, чем при наличии активного момента (точка 3 на рис.3.7,б). Это объясняется тем, что при работе привода в первом квадранте динамический момент, а следовательно, и замедление определяются суммой моментов (3.10), а их разностью: Мдин = (М–Мс) < 0 (3.11) В отличие от генераторного торможения с отдачей энергии в сеть, в режиме торможения противовключением к двигателю подводится от сети энергия с мощностью Рэл и со стороны механизма - Рм. Следовательно, потери ∆p будут: ∆р = Рэл + Рм = UI + EI = I 2 R (3.12) Таким образом, режим противовключения обеспечивает интенсивное торможение привода до полной остановки, но сопровождается значительным потреблением энергии от сети и существенным нагревом обмоток двигателя и сопротивлений при ее рассеивании. При расчете добавочных сопротивлений при противовключении на тормозном участке (до реверса) приложенное напряжение и ЭДС двигателя однонаправлены: Ri = Uz + kФн ωi / Iп. (3.13) 3) Изменение потока двигателя Ф в связи с насыщением его магнитной цепи в номинальном режиме практически возможно только в сторону его уменьшения – ослабления поля двигателя. Согласно (3.4) и (3.5) уменьшение потока вызывает увеличение скорости идеального холостого хода ω0 и уменьшение момента короткого замыкания Мкз, а ток короткого замыкания при этом не изменяется. Из-за квадратичной зависимости модуля жесткости от магнитного потока изменение механических характеристик происходит как показано на рис.(3.8).
Рис. 3.8 - Электромеханические (а) и механические (б) характеристики двигателя с независимым возбуждением при ослаблении поля
При рассмотрении этих характеристик следует иметь ввиду, что рабочий участок характеристик двигателя ограничивается его перегрузочной способностью и, как показано на рис.3.8 утолщенными отрезками характеристик, лежит вблизи скорости идеального холостого хода. Нетрудно видеть, что ослабление поля в пределах рабочих нагрузок приводит к увеличению скорости двигателя и снижению пускового момента Мп = Мкз. Основным достоинством такого способа регулирования скорости является его энергетическая экономичность, а недостатком – невозможность обеспечить пуск двигателя. В связи с этим основное применение такого регулирования – изменение скорости в диапазоне выше номинальной. Рассмотренные выше характеристики двигателя получены в предположении, что он питается от бесконечно мощной сети или от любого другого источника, обладающего свойствами источника напряжения с внутренним сопротивлением, равным нулю. Приступая к изучению динамических свойств, необходимо иметь в виду, что в регулируемом электроприводе возможно питание якорной цепи двигателя и от преобразователей, обладающих свойствами источника тока. Анализ динамических свойств электромеханического преобразователя с независимым возбуждением проведем для случая питания его от источника напряжения. Для анализа воспользуемся системой исходных уравнений, записанных в операторной форме: где ТВ = LВ / RВ – электромагнитная постоянная времени обмотки возбуждения; ТЯ = LЯΣ / RЯΣ – электромагнитная постоянная времени якорной цепи; kВ = Ф/iВ – коэффициент, соответствующий линейной части кривой намагничивания двигателя. Структурная схема электромеханического преобразователя энергии, соответствующая (3.14), приведена на рис.3.9,а. На схеме представлены два возможных канала управления при питании от источника напряжения – канал управления полем двигателя, которому соответствует управляющее воздействие uв, и канал управления по цепи якоря с управляющим воздействием uя.
Рис. 3.9. Структурные схемы электромеханического преобразователя с независимым возбуждением Из схемы следует, что при отсутствии реакции якоря процессы в цепи возбуждения протекают независимо от процессов в якорной цепи, а процессы в якорной цепи зависят от изменений магнитного потока двигателя Ф.
Цепь возбуждения двигателя представляет собой апериодическое звено с постоянной времени ТВ. Индуктивность LВ обмотки возбуждения может быть определена по формуле LВ = 2pnkнасwвФном / Iв ном, где kнас =Iв ном / Iв лин – коэффициент насыщения; Iв лин - ток возбуждения, создающий номинальный поток Фном при отсутствии насыщения магнитной цепи. Значение индуктивности LВ, определяемое данной формулой, соответствует линейной части кривой намагничивания. При работе в насыщенной части кривой намагничивания индуктивность и постоянная времени цепи возбуждения уменьшаются тем больше, чем выше насыщение. При отсутствии добавочных сопротивлений у двигателей мощностью от 1 до нескольких тысяч киловатт постоянная времени цепи возбуждения лежит в пределах ТВ = 0,2 – 5 с, причем с увеличением мощности двигателя она быстро возрастает.
При питании от источника напряжения двигатель с независимым возбуждением работает преимущественно при постоянном потоке Ф = Фном = const, при этом уравнение механической характеристики двигателя в соответствии с (3.5) принимает вид (1 + Тя р) М = β(ω0 – ω). (3.15) Этому уравнению соответствует структурная схема преобразователя, представленная на рис. 3.11,б. Она свидетельствует о том, что при Ф = const электромеханический преобразователь представляет собой апериодическое звено с постоянной времени ТЯ. Индуктивность якорной цепи двигателя может быть вычислена по приближенной формуле LЯΣ ≈ γ Uном /pnωномIном, (3.16) где γ = 0.6 для некомпенсированных и γ = 0.25 для компенсированных двигателей. Постоянная времени якорной цепи двигателей средней и большой мощности лежит в пределах ТЯ = 0,02 – 0,1с, причем наибольшие значения соответствуют некомпенсированным либо тихоходным двигателям большой мощности. Суждение о жесткости естественной механической характеристики по статической зависимости М = f(ω) и по модулю статической жесткости β дает правильные представления только для статических режимов или при достаточно плавных изменениях нагрузки. При изменениях нагрузки скачком, а также в установившихся колебательных режимах динамическая характеристика может существенно отклоняться от статической, и необходимо оценивать эти отклонения с помощью частотных характеристик. При питании якоря двигателя от источника тока iя = IЯ1 = const при любых изменениях ЭДС двигателя. Система (3.14) при этом приводится к следующему уравнению механической характеристики (1 + ТВ р) М = uвkф IЯ1 / RВ. Этому уравнению соответствует структура электромеханического преобразователя, представленная на рис. 3.9,в. Сравнивая рис.3.9, б и в, можно установить, что в режиме питания якоря от источника тока двигатель с независимым возбуждением утрачивает рассмотренные выше электромеханические свойства. Отсутствие зависимости тока якоря от скорости исключает проявление электромеханической связи, и статическая механическая характеристика двигателя при uв = const, обладает жесткостью, равной нулю. Как объект управления электромеханический преобразователь при этом представляет собой апериодическое звено с большой постоянной времени ТВ, управляющим воздействием является напряжение, приложенное к обмотке возбуждения uв. В соответствии с рис.3.9,в электромеханический преобразователь при Iя = const является источником момента М = const, значения которого можно регулировать путем воздействия на инерционный канал возбуждения двигателя.
|
 (3.5)
(3.5)






 ; (3.14)
; (3.14)



