
Глава 2. Бортовое радионавигационное оборудованиеАвтоматические радиокомпаса (АРК)
Радиокомпасами (АРК) называются бортовые автоматические радиопеленгаторы, позволяющие непрерывно определять курсовой угол наземной радиостанции (КУР). Пеленгуемая радиостанция может быть или специальной, называемая приводной (ПРС), ненаправленным радиомаяком (NDB) или обычной широковещательной (ШВРС). АРК позволяют осуществлять: - контроль пути по направлению; - вывод ВС судна в точку размещение ПРС (NDB); - определять место ВС по двум пеленгам; - фиксировать момент пролета ПРС; - осуществлять вместе с другими приборами заход на посадку; - принимать информацию от диспетчеров службы движения при отказе на борту всех основных средств связи. Специальные типы АРК (АРК-У2, АРК-УД) могут использоваться для вывода поисковых ВС в точку нахождения ВС, потерпевшего аварию. Современные АРК работают в международном диапазоне частот 150…1799,5 кГц. В составе ПНК автоматизированного СВЖ АРК является резервным средством навигации. Обычно на ВС устанавливается два комплекта АРК.
Принцип действия АРК.
Рис.1. Структурная схема АРК
В состав радиокомпаса (рис.1) входят: направленная антенна А1, ненаправленная антенна А2, приемник Прм, схема управления направленной антенной СУА, двигатель Д с редуктором, компенсатор радиодевиации КР, датчик углового положения антенны ДУПА и стрелочные указатели СУ. В общем, радиокомпас представляет собой систему автоматического управления антенной, обеспечивающую установку ее конструктивных осей в направлении на пеленгуемую PC. Сигналы с выхода антенны усиливаются радиоприемником, преобразуются и на выходе с их помощью формируется управляющее напряжение, воздействующее на двигатель, Двигатель поворачивает антенну до тех пор, пока она не установится в направлении на PC. Угловое положение оси антенны отображается с помощью стрелочных указателей на приборных досках пилотов и штурмана, Телефоны, включенные на выходе приемника, позволяют прослушивать позывные сигналы приводной PC, а в случае отказа связных PC могут использоваться для приема сообщений с земли. Компенсатор радиодевиации позволяет вводить поправку на систематические погрешности, обусловленные переотражением сигналов элементами конструкции ВС. Таким образом, радиокомпас представляет собой систему автоматического управления, чувствительным элементом которой является направленная антенна. В качестве направленных антенн в радиокомпасах используются рамочные (рис.2) и гониометрические антенные устройства.
Рис. 2. Рамочная антенна и ее диаграмма направленности в горизонтальной плоскости
Диаграмма направленности рамочной антенны в горизонтальной плоскости описывается следующим выражением:
F (υ) = sin υ;.
В полярной системе координат она имеет вид двух окружностей (рис.2). Вектор n – нормаль к плоскости витка рамочной антенны. Гониометрическая антенна по своим электрическим свойствам подобна рамочной антенне. Их ДН одинаковы. Но конструктивно они отличаются друг от друга. Рамка, двигатель и редуктор привода рамки, которые приходится располагать вне герметичной части ВС, не отличаются высокой надежностью функционирования. Роль антенны в гониометрической систем выполняют две взаимно перпендикулярные, неподвижные рамки (Puc.3)
Рис. 3. Схема гониометрической антенны
блок рамочной антенны: 1 и 2 – неподвижные рамки; гониометр:1 и 2 статорные обмотки; 3 – роторная (искательная) катушка гониометра.
Из-за отсутствия подвижных элементов вне герметичной части ВС надежность такой системы гораздо выше надежности поворотной рамки. Неподвижные рамочные антенны присоединяются к входу приемника через гониометр, представляющий собой такие же две неподвижные взаимно перпендикулярные статорные катушки, внутри которых размешена подвижная роторная (искательная) катушка, непосредственно подключаемая к входу приемника. Эта катушка в процессе пеленгования поворачивается двигателем и устанавливается в поле статорных обмоток гониометра в направлении пеленга. Гониометр вместе с радиоприемником располагается в кондиционированном отсеке и влиянию неблагоприятных внешних факторов не подвергается. Учитывая направленные свойства антенны, амплитуду ЭДС на входе приемника можно представить в виде е = Еm sin υ·sin ωt. В приемнике этот сигнал усиливается и преобразуется по частоте. В итоге формируется низкочастотный сигнал
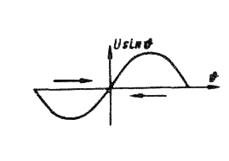
u = Um sin υ·sin Ωt.
Рис. 4. Зависимость амплитуды и фазы напряжения на выходе схемы управления рамкой от угла υ между нормалью к рамке и направлением на радиостанцию.
Зависимость амплитуды сигнала, действующего на выходе приемника и схемы управления антенной, от угла υ показана на рис.4. При - Нетрудно установить, что система, включающая все упомянутые элементы, способна обеспечить установку рамки в такое положение, при котором перпендикуляр к ее плоскости направлен на PC, и удержание его в этом положении. В самом деле, рамка будет вращаться до тех пор, пока амплитуда U·sinυ не станет равной нулю. Это произойдет при υ= 0. Можно также показать, что состояние системы, когда нормаль к рамке направлена на PC, представляет собой состояние устойчивого равновесия. Другое ее возможное равновесное состояние при υ = 180° будет неустойчивым, и при любых отклонениях от этого состояния образуется выходной сигнал, который приведет рамку в состояние устойчивого равновесия, т, е. в точку υ = 0.
|




 υ
υ 


