
Бортовые радиолокационные станцииНа ВС гражданской авиации для наблюдения за земной поверхностью и различными препятствиями широко применяются бортовые радиолокаторы (БРЛ). БРЛ - автономные средства, для их работы не требуется наземного оборудования. БРЛ, предназначенные для наблюдения за земной поверхностью, получили название РЛ обзора земной поверхности, или навигационных РЛ. Они создают на экране индикатора в некотором масштабе радиолокационное изображение (карту) пролетаемой местности. Радиолокационная карта местности позволяет ориентироваться в сложных метеорологических условиях и ночью. Для ориентировки с помощью БРЛ необходимо, чтобы на пролетаемой местности были хорошо опознаваемые радиолокационные ориентиры. БРЛ, предназначенные для обнаружения атмосферных образований и оценки степени их опасности, называются метеорологическими. Большинство БРЛ совмещают функции метеорологического и навигационного радиолокаторов, их называют метеонавигационными радиолокаторами (МНРЛ). Используя радиолокационные изображения местности и гидрометеообразований, можно решать следующие навигационные задачи: — вести ориентировку на местности, наблюдая за радиолокационными ориентирами; — определять место ВС и производить контроль пути; — находить дальность и курсовой угол ориентиров (КУО); ― определять путевую скорость, угол сноса и высоту полета; ― предупреждать столкновение с ВС и другими препятствиями; — обнаруживать грозовые очаги и осуществлять их обход; — выводить ВС в заданный район или на аэродром посадки,
БРЛ и качество их работы тесно связаны с безопасностью полетов. Объясняется это тем, что БРЛ являются единственным источником информации о зонах грозовой деятельности и мощной кучевой облачности, в которых велика вероятность сильной турбулентности атмосферы. Поэтому отказы БРЛ или их неправильное применение могут привести к опасной ситуации и развитию авиационного происшествия. Принцип работы и структурная схема.
В общих чертах принцип работы БРЛ ничем не отличается от принципа действия любого РЛ импульсного типа. БРЛ излучает в пространство мощные высокочастотные импульсы, называемые зондирующими. Они достигают различных участков земной поверхности и других объектов и отражаются ими. Отраженные сигналы возвращаются к БРЛ, принимаются им, усиливаются, и после преобразования поступают на электронно-лучевой индикатор. Принятые БРЛ сигналы создают на экране электронно-лучевого индикатора (ЭЛИ) яркостью засветки, по которым определяются координаты отражающих объектов. Наклонное расстояние до объекта r определяется по времени запаздывания отраженных сигналов, которое вследствие постоянства скорости распространения радиоволны прямо пропорционально r. Угловая координата объекта в горизонтальной плоскости — КУО определяется по углу поворота антенны относительно продольной оси ВС в момент поступления отраженных сигналов. Объясняется это тем, что вследствие использования направленной в горизонтальной плоскости антенны, отраженные объектом сигналы будут приниматься БРЛ только тогда, когда антенный луч направлен на этот объект. Яркость засветок на экране ЭЛИ определяется интенсивностью отраженных сигналов. Различные участки земли и другие отражающие объекты имеют разную отражаемость и отображаются, поэтому на экране индикатора засветками разной яркости. Совокупность засветок разной яркости образует на экране ЭЛИ разноконтрастное яркостное изображение пролетаемой местности (радиолокационную карту). Вид радиолокационной карты местности определяется структурой и характером земной поверхности.
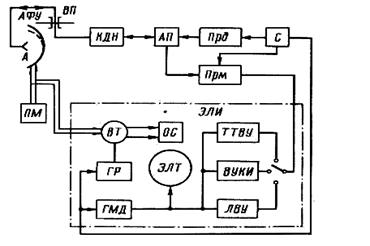
Радиолокационное изображение на экране индикатора не всегда точно совпадает с фактической картой местности. Искажения объясняются двумя причинами: измерением наклонных, а не горизонтальных расстояний и влиянием кривизны земной поверхности. Первая причина приводит к искажениям, возрастающим при увеличении угла в вертикальной плоскости, под которым наблюдается объект. Искажения удаленных участков земной поверхности практически отсутствуют. Вторая причина приводит к искажениям только на больших дальностях при полете на больших высотах. В состав БРЛ (рис. 51) входят следующие основные устройства: антенно-фидерное устройство АФУ, передатчик Прд, приемник Прм, синхронизатор и ЭЛИ. Синхронизатор вырабатывает периодическую последовательность импульсов, которые поступают на Прд и ЭЛИ. Он задает моменты излучения зондирующих импульсов и согласует во времени работу различных устройств станции. Прд служит для формирования зондирующих импульсов, Прм — для усиления отраженных сигналов, ЭЛИ — для отображения радиолокационной информации. Излучение и прием с игналов осуществляется с помощью общей приемо-передающей антенны (А). В БРЛ, используется антенна, конструктивно выполненная из облучателя и параболического отражателя, имеющая в верхней части поляризационную решетку. Такая антенна может формировать в вертикальной плоскости две ДНА: узкую - игольчатую и широкую - косекансную. Объясняется это тем, что антенна имеет две формы профиля вертикального сечения отражателя. При использовании в качестве отражателя параболоида вращения антенна формирует игольчатый луч одинаковой ширины в горизонтальной и вертикальной плоскостях. Если же в качестве отражателя используется поверхность, образованная поляризационной решеткой и нижней частью параболоида вращения, то формируется косекансный луч. Лучи антенны переключаются коммутатором диаграмм направленности (КДН), в качестве которого используется ферритовый вращатель плоскости поляризации. Это устройство под воздействием управляющего сигнала создает либо горизонтально, либо вертикально поляризованную радиоволну. При использовании горизонтально поляризованной волны антенна формирует косекансный луч. Происходит это потому, что поляризационная решетка имеет горизонтальные щели, через которые волна с горизонтальной ориентацией вектора электрического поля пройти не может и отражается поляризационной решеткой. Если же используется вертикально поляризованная волна, то она беспрепятственно проходит через поляризационную решетку, и отражателем служит параболоид вращения, что обеспечивает формирование игольчатого луча. Общая приемо-передающая антенна подключается либо к Прд, либо к Прм с помощью антенного переключателя АП. АП автоматически подсоединяет антенну к Прд в момент поступления зондирующих импульсов на время, равное длительности зондирующего импульса. После окончания этого импульса АП отключает антенну от Прд и соединяет ее с Прм на все время до поступления следующего импульса Прд. Для передачи высокочастотных сигналов от неподвижного приемопередатчика к поворачивающейся антенне используется специальное устройство — высокочастотный вращающийся переход ВП, расположенный непосредственно у входа антенны. Антенны БРЛ имеют приводной механизм ПМ, который предназначен для перемещения антенны в горизонтальной плоскости и изменения ее наклона в вертикальной плоскости. В МНРЛ, кроме того, используется устройство стабилизации антенны, которое связано с самолетной гировертикалью. Оно обеспечивает стабилизацию антенны, в результате чего сохраняется нужная ориентация оси антенны в пространстве при изменениях крена и тангажа.
Рис. 52. Временные диаграммы БРЛ: а - запускающие импульсы; б - зондирующие импульсы; в - отраженные импульсы на входе приемника; г - видеоимпульсы на выходе приемника; д - ток развертки; е - импульсы меток дальности
Работой БРЛ во времени управляет синхронизатор С, он вырабатывает запускающие видеоимпульсы с периодом повторения Tп (рис. 52, а), поступающие на Прд и ЭЛИ. Передатчик, состоящий из модулятора и генератора СВЧ, под воздействием запускающих импульсов вырабатывает мощные зондирующие импульсы длительностью τ (рис.52, б). Эти импульсы через АП поступают в антенну и излучаются в пространство. Принятые антенной отраженные сигналы поступают через АП на вход Прм, в качестве которого используется супергетеродинное радиоприемное устройство без УВЧ. Мощность отраженных сигналов значительно меньше мощности зондирующих импульсов (до 1015 раз), поэтому они не могут вызвать срабатывание индикатора без дополнительного усиления. Передатчик БРЛ не обладает достаточно высокой стабильностью частоты, чтобы обеспечить нормальное усиление сигналов в Прм. Поэтому в Прм частота гетеродина подстраивается автоматически с помощью схемы автоматической подстройки частоты (АПЧ). В некоторых типах БРЛС, кроме того, предусматривается ручная регулировка частоты (РРЧ). С выхода ПРМ снимаются видеоимпульсы, которые поступают на индикатор через специальные видеоусилители. Отраженные импульсы приходят с запаздыванием во времени относительно зондирующих импульсов, пропорциональным расстоянию между БРЛ и отражающим объектом: tз = 2r/c. Для правильной работы РЛ необходимо, чтобы отраженные сигналы поступали в каждом периоде повторения до начала следующего зондирующего импульса. Это значит, что период повторения импульсов Тп должен быть больше максимального времени запаздывания отраженных сигналов
tз = 2rmax/c, т. е. Тп > 2rmax/c.
Это неравенство носит название условия однозначного измерения расстояний в импульсных РЛС. Показанные на рис.52в, отраженные импульсы представляют собой сигналы, отраженные точечными объектами. Эти импульсы (рис. 52 в,г) имеют такую же длительность, как и зондирующие. При отражении от поверхностно-распределенных и объемно-распределенных объектов (земная поверхность и гидро-метеообразования) отраженные сигналы имеют вид длительных импульсных колебаний изменяющейся амплитуды, так как импульсы, отраженные соседними элементарными участками распределенного объекта, соприкасаются. Усиление отраженных сигналов в БРЛ осуществляется на промежуточной частоте (с помощью УПЧ) и на видеочастоте (с помощью специальных видеоусилителей см. рис.51) - трехтонового ТТВУ и видеоусилителя контурной индикации ВУКИ, а также линейного видеоусилителя ЛВУ. Они подключаются в зависимости от выбранного режима работы БРЛ ТТВУ применяется при обзоре земной поверхности для согласования ограниченного числа яркостных градаций экрана ЭЛТ с большим динамическим диапазоном отраженных сигналов от земной поверхности. ТТВУ позволяет получить оптимальное, наиболее контрастное радиолокационное изображение земной поверхности. ЛВУ применяется при наблюдении гидрометеообразований, а ВУКИ - при наблюдении грозовых очагов и мощной кучевой облачности для выделения в радиолокационном изображении этих образований наиболее опасных участков в виде темных пятен. Работа ЭЛИ и формирование радиолокационной_ карты местности. ЭЛИ состоит (см рис. 51) из электронно-лучевой трубки: (ЭЛТ) и устройств, обеспечивающих ее нормальную работу: отклоняющей системы ОС развертки ГР и меток дальности ГМД. Видеосигналы с выхода приемника поступают на управляющий электрод ЭЛТ и изменяют яркость светового пятна на экране. Чем больше отраженный сигнал, тем ярче световое пятно. ЭЛТ имеет отклоняющую систему ОС, с помощью которой электронный луч, а значит, и световое пятно могут перемещаться в любую точку экрана. Отклоняющая система ЭЛТ с магнитным управлением состоит из горизонтально отклоняющих и вертикально отклоняющих катушек. Отклоняющие катушки расположены на горловине трубки таким образом, что магнитное поле вертикально отклоняющих катушек направлено вдоль горизонтальной оси экрана, а поле горизонтально отклоняющих катушек - вдоль вертикальной оси. На катушки подаются от генератора развертки ГР токи нужных значений и направления. ГР запускается синхронизатором и вырабатывает линейно нарастающий (пилообразный) ток развертки (см. рис.52, д):
i р.=Imp·t / Tp при 0 ≤t ≤ Tр,
где Тр - длительность прямого хода развертки; Imp - амплитуда тока развертки.
Этот ток подается на роторную обмотку вращающегося трансформатора ВТ, угол поворота которой равен углу поворота антенны α, так как ВТ связан с осью вращения антенны. Две взаимно перпендикулярные статорные катушки ВТ соединяются с отклоняющими катушками ЭЛТ (рис.53).
Рис.53. Формирование развертки на индикаторе БРЛС
В статорных катушках ВТ возбуждаются пилообразные токи, амплитуды которых зависят от угла поворота антенны: Imг = Imp·sinα; Imв = Imp·cosα;. Вследствие этого токи развертки, проходящие через горизонтально и вертикально отклоняющие катушки, определяются выражениями:
i р.г= Imp·sinα·t/Tp; i p.в=Imp·cosa·t/Tp. Они создают в отклоняющих катушках магнитные поля, изменяющиеся по такому же закону. Магнитные поля вызывают отклонение электронного луча от центра экрана ЭЛТ. Поле горизонтально отклоняющей катушки смещает электронный луч по горизонтальной оси на величину х, прямо пропорциональную току развертки i р.г:
x = k i р.г = к Im.p· sinα ·t / Тр,
где к - чувствительность трубки по отклонению.
Вертикально отклоняющие катушки смещают электронный луч по вертикальной оси на величину
y = k i p.в = k Im.p cosα · t/ Tp .
Рис. 54. Отклонение луча и формирование линии развертки
В результате одновременного смещения по двум взаимно перпендикулярным осям луч попадает на экран в точку, проекции которой на оси х и у определяются выражениями. Угол отклонения луча от вертикальной оси трубки будет равен углу поворота ротора ВТ и, значит, углу поворота антенны а. Действительно, если обозначить угол между вертикальной осью и направлением из центра экрана на световое пятно через α р, то
tgap = x/y = k I m.p sin · t / T p /k I m.p cosa ·t/ Tp = tg a, т.е. αp = α. В момент времени t электронный луч отклонится от центра экрана на величину (рис.54)
l =
Отсюда следует, что отклонение луча от центра экрана прямо пропорционально времени, т. е. электронный луч движется по радиусу экрана с постоянной скоростью V = к ·Imp / Tp.
Следовательно, электронный луч прочерчивает на экране радиальную световую линию под углом, равным углу поворота антенны. Эта линия называется линией развертки. При вращении антенны линия развертки будет вращаться синхронно с ней. В момент достижения током развертки максимального значения Imp (при t =Тp) электронный луч отклоняется на максимальную величину L = k Imp, которая называется длиной линии развертки. В результате можно сделать следующие выводы. В моменты времени, соответствующие прямому ходу развертки (0 < t < Т), в каждом периоде повторения полярные координаты электронного луча относительно центра экрана
l = V · t и α p = α (4)
прямо пропорциональны времени, отсчитанному от момента излучения зондирующего импульса, а угол отклонения линии развертки от вертикальной оси экрана равен углу поворота антенны относительно продольной оси ВС. Отраженные сигналы увеличивают интенсивность электронного луча, что приводит к появлению яркой засветки в виде пятна на экране. Так как отраженные импульсы от объекта поступают тогда, когда антенна направлена на него, то угол между вертикальной осью и направлением из центра экрана на засветку будет равен КУО. Время появления отраженного импульса прямо пропорционально наклонному расстоянию до объекта t з = 2r/c. Поэтому отклонение засветки от центра экрана в соответствии с выражением (4) прямо пропорционально расстоянию г: l p = 2V·r/c. Таким образом, положение засветки на экране, индикатора однозначно определяется координатами отражающих объектов. Каждый участок земной поверхности будет отображаться на экране ЭЛИ в точке, соответствующей координатам этого участка. Совокупность засветок от всех участков земной поверхности в результате создает на экране радиолокационную карту местности. Ток развертки в БРЛ изменяется по линейному закону. В результате отклонения засветок lp оказываются прямо пропорциональными дальностям в пространстве. Такая развертка называется линейной по дальности. При использовании линейной развертки геометрическая форма радиолокационных изображений на экране индикатора будет соответствовать действительной конфигурации отражающих объектов. Практически точная линейная развертка не обеспечивается и ее нелинейность (т. е. отклонение от линейного закона) приводит к некоторому искажению изображений. При работе БРЛ от каждого точечного объекта за один оборот антенны приходит несколько отраженных импульсов. Поскольку зондирующие импульсы попадают на объект и отражаются им не только тогда, когда на объект направлена ось антенны, но и при ее отклонении от этого направления в пределах ширины ДНА в горизонтальной плоскости θ. Все принимаемые импульсы участвуют в образовании засветки объекта. Отдельные световые пятна, соответствующие каждому импульсу, располагаются на соседних линиях развертки на одинаковом расстоянии от центра экрана. Эти световые пятна сливаются из-за малого углового интервала между соседними линиями развертки и образуют отметку точечного объекта в виде дужки, угловой размер которой равен θ. Угловое положение середины этой отметки соответствует КУО. Измерение координат объектов по ЭЛИ. Для отсчета дальностей на экране ЭЛИ создается электронная координатная сетка, для чего используется генератор меток дальности (ГМД). Он запускается синхронизатором и вырабатывает последовательность импульсов с периодом повторения Тм. Импульсы ГМД вместе с отраженными сигналами поступают на управляющий электрод ЭЛТ и создают на каждой линии развертки световые пятна, расстояния между которыми на экране вдоль линии развертки l м = V ·Тм. Период Тм выбирается таким, чтобы он соответствовал определенному расстоянию гм в пространстве (например, 10; 50 км и т. п.):
Tм = 2rм /c
Совокупность засветок импульсами ГМД образует на экране световые кольца, называемые масштабными кольцами дальности. С учетом выражения () интервалы по радиусу между этими кольцами lм = 2V·rм/с, т. е. в масштабе экрана соответствуют расстояниям г в пространстве. С помощью масштабных колец дальности измеряется расстояние до ориентиров. Грубо оно определяется подсчетом числа колец, размещающихся между началом развертки и отметкой ориентира. Положение между кольцами дальности находится интерполяцией, при этом допускается СКП отсчета дальности σr = 0,1rм. КУО измеряется с помощью механической азимутальной шкалы, имеющей азимутальные деления или риски, нанесенные на светофильтре, который накладывается на экран индикатора. КУО определяется с помощью азимутальных делений способом интерполяции, при этом допускается СКП отсчета КУО σα = 0,1αм, где αм — угловой интервал между соседними азимутальными делениями. На полной длине развертки укладывается расстояние М, соответствующее длительности прямого хода развертки Тр. Это расстояние в пространстве М = с·Тр/2 называется масштабом развертки по дальности. Он указывается в километрах на положениях переключателя масштабов развертки на пульте управления БРЛ. При изменении масштаба развертки изменяется значение Тр при сохранении постоянной амплитуды тока развертки. Особенности работы БРЛ в различных режимах работы. В БРЛ используются четыре режима работы: - обзор земной поверхности - “Земля” - метеонаблюдений - “Метео” -метеонаблюдений с контурной индикацией “Контур” - измерения угла сноса - “Снос”. Режим обзора_земной поверхности. В этом режиме работы БРЛ обеспечивает обзор земной поверхности и отображение на экране ЭЛИ радиолокационной карты местности. В режиме обзора земной поверхности в БРЛ применяется косекансная форма ДН в вертикальной плоскости (рис. 55), а отраженные от земной поверхности сигналы усиливаются на видеочастоте с помощью ТТВУ.
Рис. 55. ДНА бортового РЛ в вертикальной плоскости:
1- косекансная; 2 - игольчатая Косекансная ДНА используется для устранения зависимости мощности принимаемого сигнала от расстояния r.Как следует из основного уравнения радиолокации величина Рпр связана с г и эффективной площадью рассеяния (ЭПР) σц Рпр = Ри D2λ2 σц / (4π)3 r 4. (5)
Для более полного соответствия радиолокационной карты пролетаемой местности нужно устранить зависимость Рпр от расстояния, с тем, чтобы Рпр, а значит, и яркость засветок на экране определялись бы только ЭПР, т. е. отражающими свойствами объектов. КНД антенны D зависит от угла β в вертикальной плоскости: D(β)=D0·F2(β),
где - D 0 - значение КНД в направлении максимума луча антенны; F (β) - ДНА в вертикальной плоскости.
Подставив последнее выражение, а также г =Н /sinβ (H - высота полета) в формулу (5), получим условие независимости Рпр„от расстояния:
Pи D20 λ2 σц F4(β) sin4 β / (4π)3 H4 = const
Из этого равенства следует, что мощность принимаемого сигнала не будет зависеть от расстояния или от угла места β, если будет выполнено условие F (β) sinβ = В, где В - постоянная величина. Полученное условие определяет форму ДНА в вертикальной плоскости F(β) = В/.sinβ = В·coseсβ;.
Произведя нормировку ДНА, т.е. приравняв ее максимальное значение при угле β0 единице, получим F (β) = cosecβ / cosecβ0.
Выражение показывает, что для обеспечения независимости мощности принимаемого сигнала от расстояния антенна должна иметь в вертикальной плоскости косекансную форму диаграммы направленности. ТТВУ применяется для повышения яркостной контрастности изображения на экране от различных участков земной поверхности. Радиолокационному изображению местности на экране индикатора соответствуют три основных тона: темный (слабое отражение от водных поверхностей), бледный (фон местности) и яркий (отражение от отдельных объектов с большой ЭПР). В основу работы ТТВУ положен принцип подавления некоторых промежуточных тонов до уровня фона местности с одновременным выделением отдельных, сильно отражающих объектов. Амплитудная характеристика ТТВУ, т. е. зависимость сигнала на выходе от сигнала на входе, нелинейная (рис.56). Она имеет два наклонных участка и два горизонтальных уровня. Наклон первого участка может регулироваться ручкой "Фон". При этом изменяется коэффициент усиления ТТВУ для слабых сигналов. Второй наклонный участок перемещается влево и вправо ручкой "Выделение" или "Контраст". Это значит, что переход с одного уровня выходного сигнала на другой происходит при различных значениях входного сигнала. Амплитудная характеристика ТТВУ с помощью указанных регулировок изменяется таким образом, чтобы сигналы, отраженные от незастроенных участков суши, мелких населенных пунктов, складок местности и небольших отдельных отражающих объектов, попадали на участок диапазона входных сигналов от Uвх1 до Uвх2.
Рис. 56. Амплитудная характеристика (а) и форма входного (б) и выходного (в) сигналов ТТВУ
При этом яркости засветок от незастроенных участков суши и мелких отражающих объектов выравниваются. Это приводит к повышению контрастности изображения водных ориентиров и четкости их границ, а также исключает множество ярких засветок индикатора, которые отвлекают внимание экипажа и маскируют опознаваемые ориентиры. Сигналы же, отраженные от крупных отражающих объектов (города, горы и т. п.), попадают в диапазон, превышающий Uвх3, создают на экране яркие засветки, хорошо-наблюдаемые на более слабой засветке фона земли. Таким образом, сильные отраженные сигналы оказываются выделенными по сравнению с более слабыми. И наоборот некоторые отраженные сигналы уменьшились до уровня сигналов, создаваемых равнинной земной поверхностью (фон местности). Режим метеорологических наблюдений. Он предназначен для обнаружения гидрометеообразований (главным образом грозовых очагов и мощной кучевой облачности) и отображения этих объектов на экране индикатора в виде ярких засветок. Кроме того, в этих режимах можно обнаружить горные вершины и другие крупные наземные препятствия и определить, обеспечивается или нет безопасное превышение ВС по высоте над наземными препятствиями, а также обнаружить встречные ВС и определить опасность столкновений с ними. В режиме метеонаблюдения применяется игольчатая ДНА, сечение которой плоскостью, перпендикулярной оси антенны, представляет круг (см. рис.55). Ширина ДНА 3...4° в горизонтальной и вертикальной плоскостях. В связи с использованием узкого луча БРЛ просматривает в вертикальном направлении зону воздушного пространства, которая располагается при горизонтальной ориентации оси антенны примерно в том же высотном эшелоне, который занимает ВС. Поэтому РЛ обнаруживает препятствия, которые могут представлять действительную угрозу для безопасного полета. Отраженные сигналы усиливаются на видеочастоте с помощью ЛВУ. Этот видеоусилитель имеет линейную амплитудную характеристику для достаточно больших входных сигналов. После обнаружения грозовых очагов и мощных кучевых облаков можно определить возможные пути обхода этих образований. Режим метеорологических наблюдений с контурной индикацией. Он применяется для отображения на экране индикатора наиболее опасных участков грозовых очагов в виде темных пятен на общей яркой засветке от грозового облака. В этом режиме используется игольчатая ДНА, а отраженные сигналы усиливаются на видео частоте с помощью ВУКИ. Амплитудная характеристика ВУКИ (pис.56.) линейная до некоторого порогового уровня входного сигнала Uвх.пор., а затем круто спадает до нуля. Это значит, что на выходе ВУКИ сигнал равен нулю, если это его значение на входе превышает Uвх.пор..
Рис. 56. Амплитудная характеристика (а) и формы входного (б) и выходного (в) сигналов ВУКИ
ВУКИ применяется для выявления в грозовых очагах наиболее опасных участков, которые характеризуются максимальным количеством выпадающих осадков, поэтому они создают отраженные сигналы наибольшей амплитуды. Если амплитуда такого сигнала на входе ВУКИ будет больше, чем Uвх.пор., то в выходном сигнале образуется провал до нуля и соответствующий участок грозового очага будет отображаться на экране индикатора темным пятном, которое хорошо выделяется на фоне общей яркой засветки грозового облака. Для нормальной работы ВУКИ необходимо, чтобы амплитуда отраженных сигналов на выходе приемника определялась только отражающими свойствами гидрометеообъектов и не зависела от расстояния до них. В данном режиме это обеспечивается применением ВАРУ в приемнике. Режим измерения угла сноса. Он применяется для определения угла сноса методом остановленной антенны. Этот метод основан на использовании вторичного эффекта Доплера и является наиболее точным среди возможных способов измерения угла сноса с помощью БРЛ. В режиме измерения угла сноса автоматическое азимутальное сканирование антенны прекращается, но угол ее поворота в горизонтальной плоскости может изменяться ручным способом с пульта управления. Вследствие конечной ширины ДНА в горизонтальной плоскости радиоволны излучаются БРЛ и принимаются под разными углами к вектору путевой скорости. Вследствие проявления эффекта Доплера частоты отраженных сигналов, проходящих с разных направлений в пределах ширины ДНА, будут отличаться друг от друга. При одновременном усилении в приемнике колебаний разных частот возникают биения, которые приводят к амплитудной модуляции с частотой, равной разности частот усиливаемых колебаний. Частота биений зависит от угла между осью антенны и вектором путевой скорости W и становится минимальной, когда этот угол равен нулю. Описанное явление лежит в основе измерения угла сноса методом остановленной антенны. Антенна медленно поворачивается в горизонтальной плоскости в секторе возможного расположения вектора путевой скорости. Когда ДНА не совпадает с вектором W, частота пульсаций импульсов на выходе приемника достигает сотен Гц. Изменение амплитуды импульсов с такой частотой не приводит к наблюдаемому изменению яркости засветок (из-за послесвечения экрана и свойств глаза человека). При уменьшении рассогласования между осью антенны и вектором W частота биений начинает уменьшаться, а при совпадении оси антенны с W она становится минимальной и равной нескольким герцам. С такой низкой частотой будет изменяться яркость засветок на линии развертки. В момент, когда скорость изменения яркости засветок станет минимальной, антенна останавливается, и ее угол поворота относительно продольной оси ВС оказывается равным углу сноса. Этот угол отсчитывается по азимутальной шкале индикатора, как угол между вертикальной осью экрана и линией развертки.
|



 =k Im.p · t / Tp.
=k Im.p · t / Tp.





