ЛЕКЦИЯ 4. ОСНОВЫ МЕХАНИКИ ВРАЩЕНИЯЛЕКЦИЯ 4. ОСНОВЫ МЕХАНИКИ ВРАЩЕНИЯ Судовой электромеханик в основном имеет дело с вращающимися механизмами. Аналогом силы во вращательном движении является момент. Момент — векторное произведение плеча
Кинематика вращения такова. Аналогом перемещения радиуса является угловое перемещение Как известно, длина окружности равна 2πR. Перемещение по кругу, таким образом, равно 2π радианам.
Угловое перемещение считается положительным, если оно совершается против вращения часовой стрелки, если смотреть с конца оси, обращенной к приводу (аналогично вращению Земли, если смотреть со стороны Северного полюса). Таким образом, угловое перемещение — это тоже вектор
Работа силы за один оборот равна:
То есть работа силы за один оборот равна 2π моментов. Мощность:
Величину Все величины, обозначенные (→) являются векторными. На рис. 4.1 все величины имеют положительное направление вектора по оси Х, так как, если смотреть со стороны направления положительной оси, то движение и направление момента вращающей силы будут видны против часовой стрелки. Длина вектора численно равна соответствующей величине. Динамика вращения с учетом изложенных положений кинематики будет следующая. Предположим, что на конце радиуса находится материальная точка с массой m (пишется курсивом, чтобы отличить от обозначения момента
Сил без противосил не бывает. Значит, материальная точка должна двигаться с ускорением:
Умножим обе части равенства на R, чтобы от силы перейти к ее моменту:
или
То есть момент силы равен так называемому инерционному моменту, который, в свою очередь, равен
То есть просматривается следующая аналогия с инерционной средой при поступательном движении (
Известно, что вначале люди не отличали массу от веса, так как на Земле численно масса равна весу. Поэтому величина Получаем следующее уравнение динамики вращающихся масс:
Соответственно, если на вал будут действовать как движущие силы по направлению вращения, так и тормозящие силы нагрузки, то справа будем иметь разность моментов движения и торможения — нагрузки:
Это и есть уравнение движения в физических величинах. Перейдем к относительным величинам. Для этого разделим обе части равенства на номинальный момент
а
Кроме того, обозначим относительную угловую частоту вращения через
или
Величина
где m — относительное значение движущего момента, λ — относительное значение тормозного момента. Обсудим полученный результат. В этом уравнении:
m — вход 1; λ — вход 2.
Рис. 4.2. Структура вращающегося агрегата
Вращающийся агрегат по своей структуре, рис. 4.2, представляет собой интегральное звено с входом (m-λ) (1/Та). Если (m-λ)>0, то выход будет непрерывно увеличиваться вплоть до бесконечности, если (m-λ)<0, то выход будет непрерывно уменьшаться вплоть до минус бесконечности. Иначе говоря, если вход не будет равен нулю, то агрегат пойдет в разнос. Избежать разноса можно, только сделав зависимость m или λ от φ. Так и получают с помощью различного рода регуляторов или естественной зависимости λ от φ.
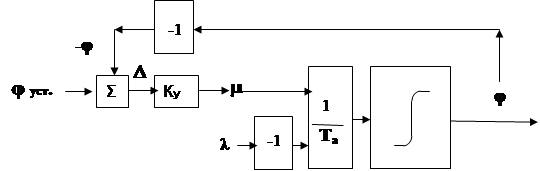
Рис. 4.3. Структура объекта с регулятором частоты
На рис. 4.3 объект дополнен регулятором частоты с отрицательной обратной связью по частоте вращения. В его состав входят инвертор, меняющий знак φ, сумматор, на выходе которого появляется разность D между уставкой, задающей желаемое значение частоты, и частотой на выходе из объекта. Эту разность называют ошибкой регулирования, так как она показывает отклонение реальной частоты от заданной. Ошибка поступает на усилитель с коэффициентом Ку, который и формирует регулирующее воздействие m, как правило, требующее усилий по передвижению рейки топливного насоса, штока клапана и др.Вустановившемсярежимеm=D*Ку=ג. Только при этом условии объект не пойдет в разнос. Тормозной момент ג задается работой механизмов на валу агрегата, которые называются приводом. Привод, в свою очередь, обеспечивает нужды судна. Поэтому это внешний фактор, под который должно подстроиться регулирующее воздействие m. Из приведенного равенства видно, что при таком регулировании ошибка D неизбежна. Причем чем больше тормозной момент ג, тем больше ошибка. Но чем больше Ку, тем ошибка становится меньше, и точность повышается. Однако беспредельно Ку увеличивать нельзя, так как система в целом перейдет в колебательный режим (подробно об этом излагается в теории автоматического управления, что выходит за рамки данного обсуждения). Наоборот, если появились колебания, то первым делом надо уменьшить коэффициент усиления регулятора, пожертвовав точностью регулирования. Изменение Ку является предметом настройки регулятора наряду с другими факторами. Ошибка в процентном отношении при номинальном режиме, ג=1, носит название «статизм» или «неравномерность регулирования», на английском языке «droop». Этот весьма важный параметр для эксплуатации параллельно работающих механизмов обычно равен 3%. Предусматривается механизм для его настройки от 2 до 6%. Регулятор можно не делать, если имеем характеристику привода, зависящую от частоты вращения. Например, если приводом является винт судна, то регулирование скорости судна можно осуществлять только лишь изменением m. Известно, что винтовая характеристика имеет квадратичную зависимость от частоты вращения. При такой характеристике происходит саморегулирование объекта, см. рис. 4.4.
Рис. 4.4. Пример саморегулирования
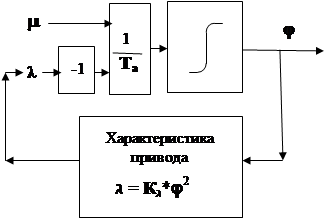
Это свойство саморегулирования (обратная связь через среду, с которой взаимодействует объект) часто применяется на малых судах, катерах и яхтах. При этом устройство двигателя значительно упрощается. Структура такого саморегулирования показана на рис. 4.5.
Рис. 4.5. Структура объекта с саморегулированием
В заключение скажем, что вопрос регулирования и настройки, а также проектирования устойчивой системы (вращающийся механизм — привод) зависит от комплекса конкретных условий, простейшие из которых были рассмотрены в настоящем разделе.
|
 на силу
на силу  (см. рис. 4.1):
(см. рис. 4.1): .
. в радианах. Радиан — rad — это единица углового перемещения на длину дуги, равную радиусу окружности.
в радианах. Радиан — rad — это единица углового перемещения на длину дуги, равную радиусу окружности.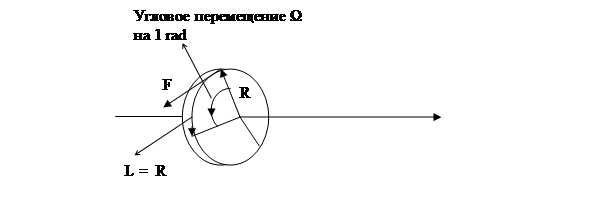
 . Угловая частота вращения
. Угловая частота вращения  равна величине углового перемещения за единицу времени:
равна величине углового перемещения за единицу времени: .
. .
. .
. , еще раз повторимся, называют угловой частотой вращения.
, еще раз повторимся, называют угловой частотой вращения. ). На эту точку действует сила
). На эту точку действует сила  . Точка движется с линейной скоростью:
. Точка движется с линейной скоростью:
 .
.

 , где
, где  — угловое ускорение. При Dt®0 имеем:
— угловое ускорение. При Dt®0 имеем: .
. , или более грамотно с учетом анализа бесконечно малых величин
, или более грамотно с учетом анализа бесконечно малых величин  ). Роль массы при вращении играет величина
). Роль массы при вращении играет величина  , которая называется моментом инерции и обозначается:
, которая называется моментом инерции и обозначается: .
. получила название
получила название  — маховой момент. Эта величина
— маховой момент. Эта величина  (маховой момент) разделить на четыре и получить момент инерции
(маховой момент) разделить на четыре и получить момент инерции  .
.
 .
. .
. . Обозначим:
. Обозначим: ,
, .
. . Заметим, что
. Заметим, что  , где
, где  есть номинальное число оборотов в минуту. Преобразуем уравнение в физических величинах в уравнение в относительных величинах:
есть номинальное число оборотов в минуту. Преобразуем уравнение в физических величинах в уравнение в относительных величинах:
 .
. носит название механической постоянной времени агрегата и обозначается
носит название механической постоянной времени агрегата и обозначается  . Она дается в справочниках для конкретного агрегата, или ее можно получить, зная номинальную частоту вращения, маховой момент агрегата и вычислив номинальный момент (с учетом знания номинальной частоты вращения и номинальной мощности механизма). Окончательно получаем уравнение динамики вращающегося агрегата:
. Она дается в справочниках для конкретного агрегата, или ее можно получить, зная номинальную частоту вращения, маховой момент агрегата и вычислив номинальный момент (с учетом знания номинальной частоты вращения и номинальной мощности механизма). Окончательно получаем уравнение динамики вращающегося агрегата:
 — выход;
— выход;