ИнтерполяторВ большинстве станков с ЧПУ управление приводами подач осуществляется дискретно с помощью импульсов. Цена одного импульса (наименьшее программируемое перемещение) или дискретность системы являются одним из ее основных технических показателей станка с ЧПУ. Поэтому приращения координат точек задаются системой ЧПУ не в миллиметрах, а в импульсах, которые отрабатываются приводами подач. Например, если дискретность составляет 0,001 мм/имп., а величина перемещения Х=12,85 мм, то это составит 1285 импульсов. В УП задаются только координаты опорных точек детали. Если для обработки определенного участка детали необходимо перемещение рабочего органа только по одной координате, то процесс управления приводом подач достаточно простой. Однако, для осуществления на станке процесса сложного формообразования необходимо, чтобы в каждый момент времени обеспечивалось согласованное движение рабочих органов станка по двум или большему количеству координат. Сложное формообразование осуществляется суммированием простых движений, но суммирование производится не механизмами, а в системе ЧПУ с помощью специализированной ЭВМ. Задание приращений по двум осям координат не гарантирует перемещение рабочего органа по заданной траектории между этими точками. Даже при постоянной скорости подачи по двум осям вследствие неравенства координат точки (Dx¹Dy) время движения по оси X не будет равно времени движения по оси Y и траектория будет искаженной (на рис.5.8,а показано штрихами). Приблизить фактическую траекторию к заданной можно введением дополнительных (промежуточных) опорных точек (точки 2—5 на рис.5.8,6) и заданием соответствующей последовательности перемещений инструмента между этими точками, т. е. траекторию приходится разбивать на более мелкие участки. Величина d определит ошибку в отработке. При программировании введение дополнительных опорных точек приводит к резкому увеличению расчетов и объема программы. Поэтому в практике детальное представление заданной траектории движения инструмента между двумя опорными точками (с выдачей команд на соответствующие перемещения по осям) осуществляется с помощью специального вычислительного устройства — интерполятора. Рисунок 9 -
Линейная траектория перемещения инструмента Интерполятор системы ЧПУ – вычислительный блок, задающий последовательность управляющих воздействий для перемещения рабочего органа в соответствии с функциональной связью между координатами опорных точек. Интерполятор является важнейшим узлом всей системы ЧПУ. Остальные узлы подготавливают информацию для интерполятора и преобразуют выдаваемые им электрические импульсы в сигналы управления приводами подач. Задача интерполятора состоит в управлении приводами подач по различным координатам и в согласовании их движения между собой так, чтобы получить траекторию движения рабочего органа максимально приближенную к контуру детали. Для решения этой задачи интерполятор выполняет следующие функции: - производит интерполяцию – расчёт координат промежуточных точек траектории движения рабочего органа по координатам конечных точек и определенному закону интерполяции в плоскости или в пространстве; - осуществляет связь перемещений по координатам. На каждый импульс интерполятора привод соответствующей координаты осуществит перемещение рабочего органа на определенную величину, зависящую от технических возможностей системы ЧПУ; - поддержание постоянной контурной скорости, т.е. электрические импульсы на приводы должны поступать непрерывно в соответствии с требуемым законом движения. Контурная скорость – результирующая скорость подачи рабочего органа, вектор которой равен сумме векторов скоростей перемещения этого органа вдоль осей координат. Интерполятор непрерывно, т. е. в каждый данный момент, в процессе перемещения инструмента от одной опорной точки к другой поддерживает функциональную связь между координатами опорных точек, т. е. обеспечивает отработку траектории в зависимости от вида функции. Траектория движения рабочего органа между опорными точками формируется системой ЧПУ путем аппроксимации сложного криволинейного контура детали отрезками интерполяционных кривых. В зависимости от вида аппроксимирующей функции существует три типа интерполяторов: линейные, линейно-круговые и линейно-параболические. Линейные интерполяторы обеспечивают перемещение между двумя соседними опорными точками по прямой, линейно-круговые – по прямым и дугам окружностей, а линейно-параболические – по прямым и параболам. В процессе работы линейный интерполятор при исходных заданных приращениях Dx и Dy непрерывно должен поддерживать такое соотношение скоростей движения инструмента по осям, при котором инструмент будет перемещаться по заданной линейной траектории. Обеспечить точно функциональную связь между движениями по осям координат в каждой данной точке траектории очень сложно. В большинстве существующих станков перемещение инструмента по заданной траектории осуществляется приближенно, путем включения подачи попеременно то вдоль одной, то вдоль другой оси. При этом интерполятор системы управления непрерывно оценивает отклонения от заданной траектории и стремится свести эти отклонения к минимуму. Скачки ступенчатой траектории незначительны. Они равны или кратны цене одного управляющего импульса, поступающего из интерполятора, или импульса, формируемого датчиком обратной связи. Например, прямая наклонная линия может формироваться попеременной подачей на приводы импульсов в такой последовательности: один импульс по оси Y и два импульса по оси X (рис.5.8,в). Поскольку в современных станках наиболее часто цена импульса равна 0,001 мм, то перемещение между двумя соседними опорными точками практически можно рассматривать как плавное. Интерполяция может быть также круговой, с помощью полиномов второй и высших степеней и др. Круговая интерполяция достаточно просто может быть использована только в том случае, если обрабатываемый контур задан участками дуг окружностей известных радиусов. Если же участок не является дугой окружности, то приходится или использовать линейную интерполяцию с аппроксимацией контура ломаной линией, или выполнять аппроксимацию криволинейного контура (например, параболы) участками дуг окружностей. Линейные интерполятор позволяет в одном кадре УП задать суммарное перемещение рабочих органов по прямой (при линейном перемещении по двум координатам), по архимедовой спирали или винтовой линии (при одновременном вращении стола и равномерном прямолинейном перемещении рабочего органа). Круговой интерполятор позволяет описать одним кадром часть окружности в любой плоскости. Интерполяционный процесс – это совокупность непрерывно повторяющихся (до полной обработки всей информации кадра) вычислительных циклов, которые завершаются определением комбинации выдаваемых на приводы подач управляющих дискрет. Алгоритмы интерполяции обслуживают тот кадр УП, который является в данный момент рабочим. Работа интерполятора как вычислительной машины основана на решении определенных задач. Известно несколько методов интерполяции, среди которых наиболее распространен метод оценочной функции, основанный на решении алгебраических уравнений. При задании информации (вводе очередного кадра программы в устройство управления) в виде координат конечной для данного участка точки интерполятор автоматически определяет положения всех точек, по которым должен переместиться рабочий орган. Рисунок 10 -
Линейная и круговая интерполяция по методу оценочной функции Это происходит следующим образом. При линейной интерполяции отрезок прямой рассматривают в системе координат, начало которой совмещено с начальной точкой интерполируемого отрезка. Оценочную функцию задают формулой Fij=yixk-xiyk. Логическая сущность оценочной функции состоит в том, что для каждой точки прямой справедливо соотношение tga=yk/xk=yi/xi или ykxi=xkyi. Эта прямая делит плоскость на две области. Если Fij=0, то точка лежит на прямой, если Fij<0, то ниже прямой, если Fij>0, то точка лежит выше прямой. После передачи на привод одного из исполнительных устройств сигнала от интерполятора о перемещении на один импульс унитарного кода это устройство перемещается на величину дискреты (чаще всего 0,01-0,001 мм), а интерполятор решает уравнение оценочной функции. Если РО находится в точке с Fij>0, то интерполятор задает перемещение вдоль оси Х до тех пор, пока не станет Fij<0 и наоборот. Ток до тех пор, пока текущая точка не попадет в точку Тк. Интерполятор производит расчет необходимого количества импульсов и их выдачу. В соответствии с принятым характером перемещений интерполятор выдает попеременно импульсы управления то по одной, то по другой координате. Например (рис.5.9,а), если из начальной точки То согласно поданному импульсу управления центр инструмента переместился по траектории То—1, то интерполятор, определив для координат точки 1 значение функции Fij=yixk-xiyk<0, следующие импульсы будет подавать в цепь управления приводом подач станка по оси Y. После подачи каждого импульса интерполятор определяет значение оценочной функции. Как только после подачи очередного импульса оценочная функция изменит знак, (в точке 2), интерполятор опять начнет выдавать импульсы для управления приводом перемещения по оси X, прекратив подачу импульсов в привод управления перемещением по оси Y. Количество импульсов на отрезке перемещения от точки к точке зависит от дискретности системы УЧПУ. Помимо расчета необходимого количества импульсов для подачи в систему привода той или иной оси интерполятор обеспечивает их выдачу для управления приводом подач. В УЧПУ большое распространение получили интерполяторы, построенные по схеме импульсных умножителей (рис.5.11). Рисунок 11 -
Функциональная схема линейного интерполятора Задающим элементом УЧПУ является генератор импульсов (ГИ), который формирует импульсы и подает их с определенной частотой на счетчик интерполятора. Как правило, частота подаваемых импульсов определяется в зависимости or программируемой подачи. Импульсы от генератора поступают на счетчик импульсов. Счетчик построен таким образом, что на каждые пятнадцать входящих в него от генератора импульсов с первого его выхода на вход в логический элемент И (Э1) поступает восемь импульсов; со второго - четыре (Э2) с третьего - два (ЭЗ) и с четвертого — один (Э4). То есть в системе имеется возможность получения импульсов со счетчика в соответствии с разрядами двоичной системы счисления (8421). Вторые входы элементов И (Э1—Э4) соединены с разрядами регистра памяти интерполятора, вкоторой в каждый конкретный момент находится кодированная (в двоично-десятичном коде) информация о необходимом перемещении рабочего органа, полученная в результате интерполяционного процесса (указано количество импульсов). Следовательно, на вторые входы элементов И с соответствующих разрядов регистра памяти будут поступать нули или единицы, т. е. данные управляющей программы. Так как на вход элементов Э1---Э4 непрерывно подаются импульсы от генератора в соотношении 8421, то возможность их прохождения через эти элементы к выходному (суммирующему) элементу Э5 определят сигналы на элементы Э1 — Э4 от регистра памяти. Если на элементы Э1—Э4 с регистра памяти поступят единицы, то эти элементы пропустят импульсы от счетчика, а если нули – то на выходе этого элемента будет ноль. В результате на выходе рассмотренного блока линейного интерполятора формируется число импульсов, соответствующих коду, записанному в регистре памяти. Например, программой задано и введено в регистр памяти число семь; в двоично-десятичном коде оно имеет вид 0111 (см. рис.5.10). Восемь импульсов с первого выхода счетчика не пройдут элемент И (Э1), так как на второй вход Э1 из регистра памяти поступает нуль. Следовательно, с выходов счетчика пройдут на элемент ИЛИ (Э5) соответственно четыре, два и один импульс. В результате на выходе блока интерполятора (элемента Э5) будет сформировано семь импульсов, что соответствует коду в регистре памяти в данный момент. Рисунок 12 -
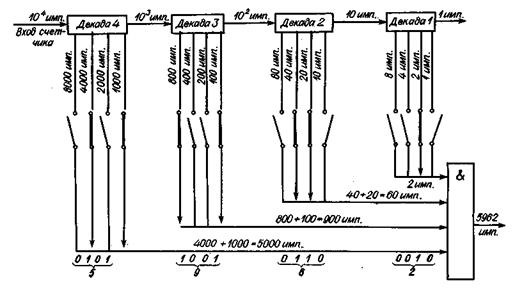
Функциональная схема блока декад линейного интсрполятора Линейный интерполятор построен из нескольких таких блоков. Двоично-десятичный счетчик по каждой координате представляет собой последовательность соединенных декад, количество которых равно количеству значащих цифр, которые СЧПУ воспринимает при задании координат рабочего органа (тысячи, сотни, десятки, единицы и десятые, сотые, тысячные доли мм). Импульсы переполнения младших декад служат входными импульсами для старших декад. Выходы счетчика всех декад по одной координате объединены и представляют собой шину Х, Y или Z соответственно. На суммирующий счетчик по координате поступает количество импульсов соответствующее закодированной в программе координате. Рисунок 13 -
Структурная схема отбора импульсов со счетчика Выходная информация из интерполятора может поступать в декодированном (импульсном) виде или в кодированном. При декодированном виде каждому импульсу соответствует элементарное приращение, которое называется ценой импульса, и является постоянной величиной для данной СЧПУ. Скорость движения подачи пропорциональна частоте импульсов с высокой степенью точности. Максимальная частота импульсов является одной из основных характеристик интерполятора. Обычно она не превышает 8-10 кГц. При цене импульса 1 мкм максимальная скорость подачи составит 600 мм/мин = 10 мм/с. Увеличение скорости возможно только путем увеличения цены импульса, что снижает точность обработки. Для увеличения скорости подачи без снижения точности используют кодированную форму выдачи сигналов с выхода интерполятора. Чаще всего используется двоичная система кодирования. Импульсы с выхода интерполятора поступают с постоянной частотой 100-200 Гц. Цена импульса меняется, чем больше цена импульса, тем выше скорость движения рабочего органа. При больших скоростях цена импульса может достигать нескольких десятков миллиметров. Максимальная скорость подач при таком способе выдачи управляющих импульсов может достигать 10-15 м/мин. Кодированная система выдачи управляющих импульсов в настоящее время используется практически во всех системах ЧПУ построенных на базе ЭВМ. При интерполяции может быть использован любой закон изменения сложной траектории движения узлов. Он устанавливается вводом соответствующей информации-инструкции. Чтобы не усложнять интерполятор, иногда его функции делят между универсальной ЭВМ и линейным интерполятором. Выполнение функций управления с помощью программно-математического обеспечения дает наибольшую гибкость в использовании аппаратных средств, но может быть ограничено быстродействием процессора. Это относится, в частности, к интерполяции и управлению приводами. Для разгрузки вычислителя в определенных модификациях устройств ЧПУ с «Электроникой НЦ-60» интерполяция выполняется аппаратно, что позволяет увеличить число управляемых координат. ЭВМ определяет координаты лишь отдельных промежуточных точек программируемого сложного контура, а линейный интерполятор аппроксимирует участки между точками и находит значения всех остальных точек, располагаемых по линейному закону между основными. Используют также компромиссное решение: используют двухступенчатую интерполяцию. В этом случае «грубая» (покодовая) интерполяция выполняется ПО, а «тонкая» - аппаратными средствами. Величину перемещения от одного импульса программы всегда приводят в технической характеристике станка, ее называют дискретностью задания перемещений. Нарезание резьбы на токарном станке выполняется следующим образом. Привод шпинделя не управляется интерполятором, но шпиндель снабжен датчиком вращения, синхронизирующие сигналы с которого поступают в электронный делитель импульсов устройства управления. Коэффициент деления (передаточное отношение) датчика программируется. Сигналы, снимаемые с делителя, являются управляющими для привода подач. Такой способ суммирования простых движений называется электронной гитарой. Программоносителем является величина передаточного отношения, устанавливаемая с помощью делителя. Эта величина может изменяться во время работы по определенному закону для нарезания резьбы с переменным шагом.
|