Формальное описание процедуры принятия решений
Федеральное агентство по образованию
Государственное образовательное учреждение высшего профессионального образования
“ИЖЕВСКИЙ ГОСУДАРСТВЕННЫЙ ТЕХНИЧЕСКИЙ УНИВЕРСИТЕТ”
КАФЕДРА «МЕНЕДЖМЕНТ»
Методические указания
по выполнению контрольной работы по дисциплине
«Исследование систем управления»
Ижевск 2008
Для выполнения этой задачи необходимо составить формальное описание объекта исследования.
2.8.1.Формальная запись объекта исследования Полученное в п. 7 представление об объекте исследования необходимо представить в виде формальной модели, которая включает: • набор входных воздействий (входов). (Входами являются все воздействия, которые система испытывает со стороны внешней Среды). Обозначим входные воздействия х+, а всю их допустимую совокупность Х+, т.е. х+ Î Х+. • набор выходных воздействии (выходов) в системе. (Выводами являются все воздействия, которые система оказывает на элементы внешней среды). Обозначим выходные воздействия х-, а всю их допустимую совокупность Х-, т.е. х- Î Х-. • набор параметров, характеризующих свойства системы, постоянные во все времена рассмотрения, и влияющих на выходные воздействия системы. Обозначим постоянные параметры а,а всю их допустимую совокупность - А, т.е. а Î А. • набор параметров, характеризующих свойства системы, изменяющихся во время ее рассмотрения (параметры состояния) - у, и всю их допустимую совокупность - У, у Î У. • параметр (или параметры) процесса t в системе и всю их допустимую совокупность - Т, t Î Т. • правило S (функция, оператор) определения параметров состояния системы по входам х+, постоянным параметрам а, параметру t. Следует иметь в виду, что определяемая по правилу S величина у = S (х+, а, t), есть величина расчетная. Вместе с тем, о величине у можно говорить и вне правила ее определения, как о реальном значении параметров состояния системы. • правило V (функция, оператор) определения выходных характеристик системы по входам х+, постоянным параметрам а, параметру процесса t и параметрам состояния у, т.е. х- = V (х+, a, t, у). • правило `V (функция, оператор) определения выходного состояния системы по входным х+, постоянным параметрам а, параметру процесса t. Правило `V получается подстановкой правила получения у с помощью оператора S. Тогда получим х- = `V (х+, а, t). На данном этапе выполнения курсового проекта содержание правил S, V, V, может быть выражено в словесной форме, но должны быть указаны конкретные значения входов, выходов, постоянных параметров и параметров состояния. Формальная модель отображается в виде схемы, показанной на рисунок 4, с указанием содержания параметров, используемых в курсовом проекте.
Рисунок 4- Схема модели
Рассмотрим примеры формального описания модели системы. 1. Пусть система дифференциальных уравнений вида dy ---- + Ay = f(t), (1) dt решается во времени t для различных начальных условий у0 и различных правовых частей f (t). Требуется описать процесс с использованием формальной модели. Формальное описание. • входы: начальные условия, т.е. t0 = t (t=0), у0=(t=0), вектор правовых частей f (t), значение t1 до которою необходимо интегрировать (решать) систему; • выход: значение у в момент t1: у (t1) = у1; • неизменные параметры системы: матрица коэффициентов А; • параметры состояния: вектор значений y (t), получаемых при решении уравнений во времени t; • параметр процесса: время t; • правило S: решение дифференциального уравнения в зависимости oт начальных условий, констант, правых частей и аргумента (времени):
y=S (t0, у0, А, f(t), t), (2)
• правило V: подстановка в выражение для решения дифференциального уравнения значения t1: у1 = у/ t = t1; • правило ``V зависимость у1= у (t0, у0, А, f(t), t1), отражающая связь выходного состояния от входа. 2. Рассмотрим формальное представление модели участка информационного обслуживания выборов на период проведения избирательной компании, перед которым поставлены цели своевременной распечатки списков при минимальном расходе бумаги. • выходы: х+1 - количество листков прописки-выписки, поступающих от избирателей vi - количество использованной бумаги для распечатки списков; х 2 - стоимость неиспользованной бумаги. • постоянные параметры: a1 - количество строк на листе; a2 - стоимость одного листа бумаги; а3 - штраф за один лист заказанной, но неиспользованной бумаги; а4 - вероятность поступления определенного числа листков прописки. a5 - вероятности поступления определенного числа листков выписки. • параметр состояния, характеризующий свойства системы, изменяющейся во время ее рассмотрения: у - штраф за неиспользованную бумагу в зависимости от числа заказанной бумаги "и" (в листax), стоимости листа, вероятности поступления определенного числа листков прописки и выписки в течение рассматриваемого периода времени • параметр процесса - один месяц. • правило S: определение величины штрафа в зависимости от числа заказанной бумага, стоимости одного листа бумаги, распределение вероятностей числа листков прописки а4 и выписки a5 в течение месяца. • правило V, определение числа заказываемой бумаги "п", доставляющего минимум параметру состояния у - штрафу за неиспользованную бумагу.
2.8.2. Формирование модели процесса управления
2.8.2.1.Формирование модели процесса с управлением Управление связано с достижением цели. Достижение цели означает решение задачи получения желаемого выходного воздействия или желаемого выходного состояния системы. Постановка цели перед системой и ее достижение связана с целенаправленным вмешательством и функционирование (строение, создание) системы. Целенаправленное вмешательство в процесс называют управлением. Обозначим его буквой "u". Причем "u" есть элемент множества некоторой возможной совокупности управлений U, т.е. u € U. Введем специальное обозначение "f" для тех выходных воздействий, на которые можно влиять выбором управлений "и". Величины f называются критериями и являются частью выходов х-. Обозначим символом "G" поставленную цель, а желаемый тип выхода, характеризующий ее достижение, через f С. Как следует из п. 7 параметры состояния "у" и выходные воздействия х- определяются по входам х+, постоянным параметрам "а" и параметру t. Следовательно, достижение критерия fС зависит от получаемых характеристик состояния у: f С = f(y). Допустим, что цель fС достижима в момент tС посредством приобретенной) системой состояния ус. При этом состояние ус может быть достигнуто управляемым процессом S^оi. Тогда процесс управления есть некоторое правило перехода от ситуации со значением параметров (t0, y0), к ситуации, характеризующейся триадой (t0, ус, UG). Формально этот процесс можно записать либо в виде: Sto t(to,yo)= у (t,u), f(y)= fG, у € Y, t€ T, u € U, когда цель выражается числом fG, либо Sto t = y(t,u)= уG, когда цель характеризуется желаемым состоянием уG. Любую допустимую последовательность управлений "u" для каждого шага, переводящую систему из начального состояния в конечное, называют стратегией управления. Допустимая стратегия управления (u € U), доставляющая функции цели заданное (экстремальное) значение fG, называется оптимальной. Целью fG может быть как конкретное число, так и ввод величины в
L <= fs <= В, S= 1,2,,, (3) где L, В - min и max значения, S - количество критериев.
Для того, чтобы построить формальную модель с управлением необходимо выполнить следующие этапы: 1. произвести выбор управляемых переменных: 2. определить допустимые совокупности их изменений (ограничения "снизу" и "сверху"), 3. выбрать модель расчета параметров состояния; 4. конкретизировать числовой критерий оптимизации; 5. сформулировать математическую модель оптимизации.
2.8.2.2. Выбор управляемых переменных На этом этапе моделирования необходимо провести различие между теми величинами, значения которых можно варьировать и выбирать с целью достижения наилучшего результата и величинами, которые фиксированы или определяются внешними факторами. Одни и те же величины, в зависимости or выбранных границ оптимизируемого процесса и уровня детализации и описания, могут оказаться либо управляемыми переменными, либо нет. Например, в описанном в п. 6 примере с цехом, объем поставок какого-либо сырья из другого цеха в одних случаях следует считать фиксированным или независящим от нашего выбора, а в другом случае регулиpуемым, т.е. управляемой переменной.
2.8.2.3. Определение ограничений на управляемые переменные В реальных условиях на выбор значений управляемых переменных, как правило, наложены ограничения, связанные с ограниченностью имеющихся ресурсов, мощностей и других возможностей. При построении математической модели эти ограничения обычно записывают в виде равенств и неравенств или указывают множества, которым должны принадлежать значения управляемых переменных. Например, если месячный объем выпуска продукции цехом является управляемой переменной, то ее значения не могут быть отрицательными, и ограничены сверху максимальной производительностью оборудования цеха Vmax, т.е. если V - объем месячного выпуска, то 0<=V<=Vmax.
2.8.2.4. Выбор общей модели расчета параметров состояния При выборе модели расчета параметров состояния системы используется одна из известных общих моделей: управления запасами, общая линейная модель распределения, модель задачи о назначениях, модель задачи о назначениях (транспортная задача), динамического программирования, продавца газет, "дерево решений". Для управления запасами наиболее простая общая модель расчета параметра состояния системы у, представляемого в виде издержек, зависящих от: • расходов, связанных с размещением заказа и поставок партии - k; • издержек на содержание единицы продукции в единицу времени - S; • спроса - V; • размера партии поставок q, имеет вид
kV Sq у = L = ----- + ------, (4) q 2
где L - издержки на содержание запаса и единицу времени.
Эта модель справедлива при условиях, что: - уровень запаса снижается равномерно в соответствии с равномерно поступающими требованиями У (спросом), который может быть определен как:
Q V = ---- (5) Т
где: Q - общий объем поставок; Т - время обеспечения запасом в объеме Q.
- заказ на поставку партии подается, когда зaпac исчерпан и выполняется мгновенно; - расходы, связанные с размещением заказа и поставок партии не зависят от объема партии и равны постоянной величине "k". Если в качестве параметра процесса взять время 1, то издержки от начала процесса (момента t0=0 поставки первой партии q) будут рассчитываться по формуле: L(t) = ( Эта модель может использоваться как для определения «фактического» состояния по истечении некоторого интервала времени, меньшего или равного Т, так и прогнозирования издержек на поддержание запаса в оставшейся до момента Т временной отрезок. Так, положив t равным Т, получим прогноз общих издержек при работе с принятой партией q, вычисляемых по формуле: L(t) = Подставляя вместо Vего значение V = L(t) = kn + S где п = Для прогнозирования издержек в произвольный момент времени t1 (0< t1 < Т) определим оставшийся отрезок времени (Т – t1) и объем поставки Q(T-t1). Тогда расчет параметра состояния L (издержек) в зависимости от неуправляемых (постоянных) параметров k, S, V и управляемой переменной q в любой момент времени t1 будет осуществляться по формуле:
L(k, S, Q(t), T(t), q) =
В распределительных задачах модель определения состояния связывает параметры состояния - величину получаемой прибыли, убытка, времени выполнения работ, издержек материалов, трудовых ресурсов и т.д. - со значениями распределяемых величин через постоянные параметры, характеризующие "вклад" каждой распределяемой величины в данную характеристику состояния. Например, в цехе имеется три группы взаимозаменяемого оборудования с мощностями M1, M2, M3 норма-часов в месяц. Цеху необходимо выпустить 5 видов продукции в объемах П1, П2, П3, П4, П5. Время изготовления единицы каждого вида продукции j на i - оборудовании составляет tij. Например, время изготовления единицы продукции П2 на первом виде оборудования t12 = 0,6 часа. Известны денежные затраты на изготовление единицы продукции j на каждом i-виде оборудования. Например, затраты на изготовление единицы П3 на втором виде оборудования составляют Z 23 = 40 рублей. Известна отпускная цена C1 каждого вида продукции C1, C2, С3, C4, C5. Процесс распределения состоит в размещении заказов по видам оборудования, т.е. определении доли xij объема продукции Пj на каждом виде оборудования i. Количественная оценка состояния в рассматриваемой задаче определяется зависимостью от выбора значений управляемых переменных хij и включает три характеристики: 1. Состояние по загрузке мощностей y1. 2. Состояние по выполнению объема у2. 3. Состояние по прибыли у3.
Состояние y1 включает три компонента у11, у12, у13, определяющие загрузку групп оборудования:
У11 = t11 x 11 + t12x12 + t13x13 + t14 x14 + t15x15 (10)
У12 = t21x11 + t22 x22+ t23 x23 + t24 x24 + t25 x25 (11)
У13 = t31x31 + t32 x32 + t33 x33 + t34x 34 + t35 x35 (12)
Состояние у2 включает пять компонентов у21,......у25, определяющих выполнение заданий по изделиям при их изготовлении на различных группах оборудования:
у21 = хll + х21 + х31 (13)
у22 = x12 + x22 + x32 (14)
у25 = x15 + x25 + x35 (15)
Состояние у3 характеризуется числовым значением прибыли, определяемой как сумма произведений прибыли от одной единицы продукции на ее количество xij:
3 5 уЗ = Σ Σ (Сj – Zij) xij, (16) i j
или УЗ = (Ci - Zll) Xll + (C2- Z12) X12 +.... + (C5 – Z15) X15 +
+ (C1 – Z21) X21 +.... + (C5 – Z25) X25 + (C5, - Z31) X31 +.... + (C5 - Z35) X35
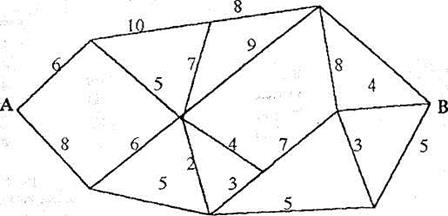
Параметром процесса в распределительных задачах являются моменты поступления входных данных. Расчет параметров состояния в модели динамического программирования производится путем разбивки процесса принятия решения на ряд однотипных этапов, каждый из которых планируется отдельно, но с учетом состояния системы на начало этапа и последствий принятого решения в будущем. Последний этап изучается отдельно и планируется наилучшим образом. Состояние системы на каждом этапе определяется набором характеристик x1, x2, хn. Дальнейшее изменение се состояния зависит только от данного состояния и не зависит от того, каким путем система пришла в него. На каждом шаге выбирается одно решение, под действием которого система переходит из предыдущего состояния в новое, причем это решение связано с выигрышем или потерей, которые зависят от состояния на начало этапа и принятого решения. Программирование разворачивается от конца к началу. Оно осуществляется на основе предложений об ожидаемых исходах предшествующего, еще неисследованного состояния. Находится наилучшее управление, зависящее от возможных исходах (характеристик состояния) предыдущего этапа. Завершив анализ конечного этапа, рассматривают аналогичную задачу для предпоследнего этапа, требуя, чтобы функция цели достигла экстремального значения на двух последних этапах вместе. Проделав такой процесс определения наилучших (условно-оптимальных) управлений для каждого шага от конца к началу, а затем oт начала к концу находят оптимальное управление (стратегию) для каждого шага с точки зрения процесса. Рассмотрим простейший пример применения модели расчета параметров состояния методом динамического программирования. Пусть задана транспортная железнодорожная сеть (рисунок 5), на которой указаны пункт отправления А, пункт назначения В и расстояние между пунктами. Требуется составить маршрут из пункта А в пункт В минимальной длины.
Рисунок 5 - Транспортная сеть.
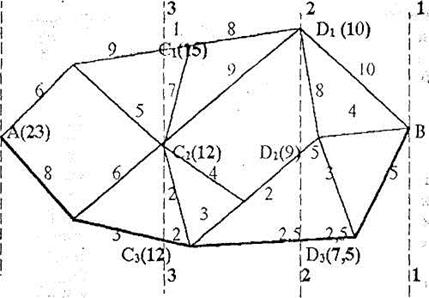
Для использования модели динамического программирования разобьем расстояние между А и В на этапы как показанo на рисунке 6. Оценим отрезки, на которые делят участки сети этапы 2-2 и 3-3. Например, этап 2-2 делит участок длиной 5 на два участка длиной 2,5. Последний этап 2-2 характеризуется состоянием, включающем три точки (D1, D2 и D3). Выбор кратчайшего пути начнем с конца. Определим точку состояния, соответствующую минимальному пути до точки В. Для точки D1 min (10; 8+4; 8+3+5) = 10; для D2 min 5 + 4; 5+3+5) = 9; для D3 min (2,5 3+4; 2,5 +5) - 7,5. (Эти расстояния указаны в скобках). Далее рассматриваем состояние второго этапа, включающие точки С1, С2, С3). Кратчайшее расстояние от этих точек до пункта В показаны в скобках. Наконец находим длину минимального пути, ведущего из А в В. Это расстояние равно 23 единицам. Затем проходим этапы в обратном порядке и находим кратчайший путь. Он выделен жирной линией.
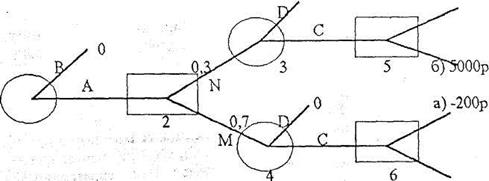
Рисунок 6 - Этапы решения задачи. Эта задача находит применение для определения значений Cij -удельных затрат на перевозку (тарифов) - в транспортной задаче. Для того чтобы использовать модель "дерево решений" необходимо отразить процесс принятия решения в виде перехода системы из одного состояния в другое. Он включает последовательность состояний и связей между ними и изображается в виде графа, моделирующего варианты возможного перехода системы из исходного события в завершающее. Узлы отражают состояния, в которых возникает необходимость выбора (принятия решения), а ветви - события, которые могут иметь место после принятия решения. При этом существует два вида решении, выбираемых нами и осуществляемых "природой" и "рынком". Такой подход можно использовать для решения задач, связанных с неопределенностью развития систем, перехода из одного состояния в другое в условиях неопределенности Например, пусть модель, представленная на рисунке 7, отражает фрагмент модели организации студентами мероприятия "Элегант - шоу" а) -200р
б) -5000р Рисунок 7 - Граф состояний
Блок I отражает исходное состояние, ветвь А - заключение договора с ДК "Интеграл", ветвь В - отказ от договора. В случае заключения договора (ветвь А) вероятность "решения" природой того, что будет найдено необходимое количество команд ветвь N равная 0,3, а не найдено (ветвь М) равна 0,7. В блоках 3 и 4 принимаются решения: проводить рекламную компанию (ветвь С) или не проводить (ветвь D). В случае проведения компании природа может обеспечить осуществление "Элегант - шоу" и обеспечить получение выручки 5 тыс. рублей или не проведение и убыток в 200 рублей. Для определения «цены» узлов 5, 6, 3 и 4 используются условные вероятности, а для нахождения оптимальной стратегии - метод динамического программирования.
2.8.2.5. Выбор числового критерия оптимизации В разделе 2.6. была сформулирована проблема, являющаяся предметом исследования и определен объект проектирования формализованной управляющей системы. Для оценки степени достижения цели, которая приводит к решению проблемы, как отмечалось ранее в п. 8.1, вводится критерий (критерии), представляющий собой желаемый тип выхода для достижения цели и, называемый поэтому целевой функцией. В любой из моделей определения параметров состояния системы, приведенных в п 8.4, можно выделить критерий оптимизации, численное значение которого может служить оценкой степени достижения цели Так, в процессе управления запасами цель состоит в минимизации расходов на создание и содержание запаса. Поскольку в качестве параметра состояния у выбраны издержки L (см п. 2.8.2.4), то числовой критерий оптимизации состоит в минимизации функции k V Sq L = ---- + ------- (17) q 2
в зависимости от единственной управляемой переменной q. В процессах управления, связанных с распределением ресурсов, в качестве параметров состояния принимается величина прибыли, убытка, выполнения работ, издержки материала, требуемые трудовые ресурсы и т.д, которые зависят от числовых значений распределяемых величин xij. В зависимости oт формулировки проблемы определяется цель и численный критерий ее достижения. Например, для условий приведенных в п.2.8.2.4 при заданных обьемах выпуска и мощностях можно поставить задачу максимизации прибыли за счет рационального использования взаимозаменяемого оборудования. Тогда в качестве числового критерия оптимизации будет служить модель для определения состояния по прибыли
3 5 Z1 = у3 = Σ Σ (сj + zij) xij (18) i=1 j=1
Или можно в качестве числового критерия оптимизации рассмотреть минимизацию общих затрат денежных ресурсов на изготовление изделий:
3 5 Z2 = Σ Σ zij xij (19) i= 1 j =l
Или минимизацию затрат времени на изготовление заданного объема продукции:
3 5 Z3 = Σ Σ tij xij (20) i= 1 j =l
Числовой критерий оптимизации в модели динамического програм-мирования и "дерева решений" реализуется на каждом этапе в соот- ветствии с поставленной целью управления. Он состоит в выборе опти- мального значения управляемой переменной (одного из параметров со- стояния на каждом этапе), доставляющего max (nun) значения целевой функции (например, пути в сети), на каждом этапе.
2.8.2.6. Формулировка математической задачи оптимизации Объединяя результаты предыдущих этапов построения математической модели, ее можно записать в виде математической задачи оптимизации. Если известна целевая функция Z(х), то для записи задачи оптимизации в общем виде используется символика:
Z (х) → min (max) = fG (21) х € U, где U - допустимое множество, заданное ограничениями на управляемые переменные.
Для управления запасами математическая задача оптимизации запишется как:
k γ S q L = ------ + --------- → min (22) q 2 0 < q ≤ qmax,
где qmax - есть предельно возможная, например, из-за грузоподъемности транспорта, денежных ресурсов или других причин партия поставки.
Для управления распределением в ситуации, приведенной в п. 2.8.2.4 и 2.8.2.5, можно рассмотреть несколько вариантов.
1. Оптимизация прибыли:
3 5 Z1 = y3= Σ Σ (сj- zij) xij → max (23) i=1 j=1
при 0 < у11 ≤ M1 0 < у12 ≤ M2, 0 < у13 ≤ М3,
у21 = П1, у22 = П2, у23 = П3, у24 = П4, у25 = П5
2. Минимизация денежных затрат 3 5 Z2 = Σ Σ zij xij → min (24) i=1 j=1
при тех же ограничениях, что в п. 1.
3. Минимизация затрат времени:
3 5 Z3 = Σ Σ tij xij →min (25) i=i j=i при ограничениях
у21 = П1 у22 = П2, у23 = П3, у24 = П4, y25 = П5,
3 5 Z = Σ Σ (сj - zij) xij ≥ Zmin i=l j=l
где Zmin - минимально допустимая величина прибыли.
Формулировка задачи оптимизации в моделях динамического программирования (с закрепленными концами) состоит в определении начального и конечного состояний, этапов перехода, количественных характеристик состояния каждого этапа и формулировке критерия принятия решения на каждом этапе.
2.8.2.7. Построение модуля выработки оптимальных (формальных) решении В п. 4.3 было дано определение модуля. Модуль выработки решений реализует процесс получения оптимальных решений в соответствии с математической задачей оптимизации по входам, постоянным параметрам и управляемым переменным. Полученные на выходе оптимальные решения являются тeми значениями управляемых переменных которые доставляют экстремальное значение целевой функции, т.е. являются наилучшим путем достижения цели и поэтому играют роль управляющих воздействий (управлений) на управляемый процесс. Представим процесс выработки решений в виде формальной модели процесса. Тогда, для того, чтобы построить модель выработки решений необходимо: 1. Определить входы х+, выходы х-, постоянные а и переменные факторы х, влияющие на выход х. 2. Определить параметры состояния у. Выбрать модель расчета параметров состояния у по входам х+, постоянным параметрам а, управляемым переменным х (правило S) 3. Выбрать числовой критерий оптимизации Z. 4. Сформулировать математическую модель оптимизации. 5. Реализовать правило формирования оптимального выхода в соответствии с математической моделью оптимизации (правило V, V- или V и V-) х- = V (x+, a, t, y) (26) х- = V (x+, a, t)
На выходе модуля получаем выходные характеристики х в виде набора управляющих воздействий х 1= u1, x 2= u2, ……, доставляющих целевой функции экстремальное значение fG,. Такой модуль может быть условно назван "решателем", поскольку он вырабатывает управления в соответствии с законом управления, задаваемым правилами S, V или V-. Его схематично можно представить как показано на рисунке 8.
Рисунок 8 - Схема модуля "Решатель" На рис. 11 буквой G обозначена цель, в соответствии с которой выбираются значения управляющих воздействий, позволяющих получить экстремальное числовое значение критерия, характеризующего достижение цели. Рассмотрим построение модуля формальной выработки решений («решателя») на примере процесса управления запасами. Входы: x+1 - количество QI ресурса i х+2 - время Т, на которое требуется обеспечение ресурсом i Постоянные параметры: ai = k - издержки на размещение и поставку партии a2 = S - издержки на содержание запаса а3 - V - спрос
Переменная (управляемая) величина: q - партия поставки ресурса Параметр состояния издержки на обеспечение запасом: y = L Модель расчета параметра состояния в единицу времени:
k V Sq У = L = ------ + ------ = S (k, V, S, q) (27) q 2 Числовой критерий оптимизации
k V Sq Z = L = ----- + ------ (28) q 2 Математическая модель оптимизации:
k V Sq L = ----- + ------ → min (29) q 2 0 < q ≤ qmax
Формирование выхода:
x 1 = V (k, V, S, q)
Правило V соответствует оператору отысканию оптимального значения q =x1 обращающего в нуль производную числового критерия оптимизации L пo q, т.е. dL ----- = 0 (30) dq T q и нахождения оптимального значения цикла поставки τ = -------. Q Правило V формирует выход х3, определяющий значение затрат на время t, т.е. х3 = L t. Теперь "решатель" можно изобразить схематично, как показано на рисунке 9.
Рисунок 9 - Модуль выработки формальных решений в процессе управления запасами
Аналогично можно представить "решатель" для задач распределения, а также динамического программирования (для одного трапа). В контрольной работе в модуле "решатель" символы должны быть отображены конкретными числами, характеризующими управляемый процесс в соответствии с информационным обеспечением.
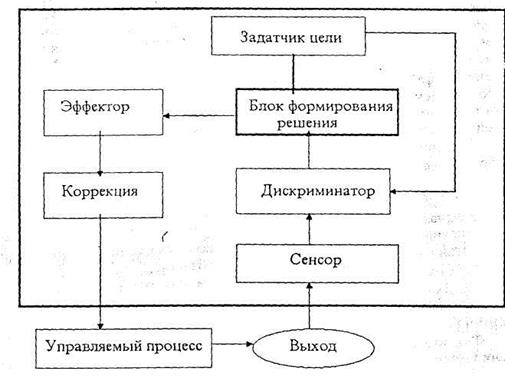
2.8.2.8. Построение модели замкнутой (динамической) системы управления. 2.8.2.8.1. Структура цикла непрерывного управления Модель замкнутой системы управления строится по принципу управления процессом для получения некоторого конечного результата (выхода). Она включает управляемый процесс, фактический выход и управляющую систему, обеспечивающую достижение конечного результата. Эти блоки образуют контур регулирования с отрицательной обратной связью. Представим его в виде блок-схемы (рисунок 10):
Рисунок 10 - Структура замкнутой системы управления
Сенсором является некоторое устройство, механизм, который считывает значение контролируемой переменной. Задатчик цели задает стандарт – эталон, с которым будет сравниваться полученный результат. Это сравнение осуществляется блоком, называемым дискриминатором или компоратором. Различия между действительными и фактическими значениями переменных передаются в блок формирования решения, который определяет, какое именно действие (управление) должно быть выполнено исполнительным органом- эффектором. Блок формирования решения для рассматриваемого объекта был сформулирован в соответствии с п. 2.8.2.4. При выполнении настоящего раздела следует иметь в виду, что замкнутая система управления является динамической системой и предназначена для долговременного управления процессом, протекающим во времени и в условиях воздействия окружающей Среды. В предыдущих разделах процессы управления запасами, распределением, процесс принятия решения рассматривались как операция принятия решения в фиксированный момент времени на какой-то промежуток времени. В общем случае необходимо рассмотреть непрерывное функционирование объекта во внешней среде. Моделью, способной анализировать поведение управляемой системы к требованиям (целям) и возмущающим воздействием внешней Среды, является приведенная на рис. 13 кибернетическая модель управления. Она позволяет получать непрерывно конечный результат, соответствующий поставленной цели и ограничениям и поэтому, с точки зрения организационных систем, называется управлением по конечному результату. Фактически достигаемый конечный результат измеряется входным анализатором. Он с помощью сенсора (датчика) измеряет фактическое значение результата, а дискриминатор сопоставляет его с желаемым (эталоном), в результате чего становиться ясно: требуется ли принимать решение и воздействовать (корректировать) управляемую систему на следующем цикле или нет. Рассмотрим построение модели системы управления па примере управления запасами.
2.8.2.8.2. Динамическая модель управления запасами В начале рассмотрим управляемый процесс во времени. Он состоит в пополнении запаса элементов на некотором складе, причем потребление элементов может случайным образом колебаться. Поэтому вместо константы v, характеризующей расход в простейшей модели, он является некоторой случайном величиной р (t – t0) за период времени между текущим моментом t и моментом предыдущей поставки партии t0. Фактическое состояние запаса на складе у (t) в текущий момент времени t определяется выражением:
y(t) = y(t0)+Σqi (t-t0) - Σpi(t-t0), (31)
где: у (t0) - запас элементов в момент времени t0. Σ qi (t – t0) - суммарное поступление элементов с момента t0. Σ pi (t – t0) - суммарный расход элементов с момента t0
Тогда модель склада можно изобразить схемой в виде модели:
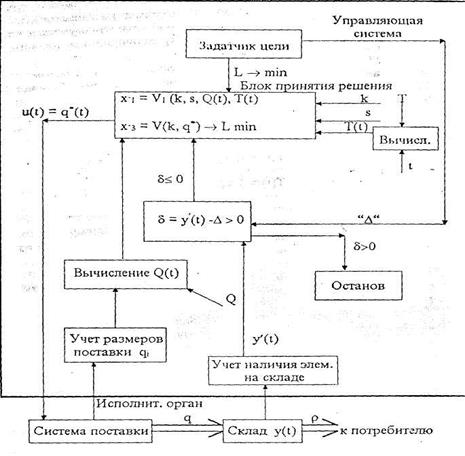
Рисунок 11 – Модуль формирования состояния склада Задатчик цели формирует две цели. Первая - непрерывное обеспечение ресурсом потребителя. Мерой оценки ее достижения служит эталон в виде неснижаемой величины запаса в количестве "Δ". Вторая минимизация издержек на поддержание и хранение запаса, т.е. требование L → min. Схема модели замкнутой (динамической) системы управления процессом показана на рисунке 11. Значение эталона "Δ" поступает в дискриминатор, значение цели - в блок принятия решения. Сенсор учитывает фактическое количество элементов на складе путем их визуального наблюдения и счета. Полученное количество у (t) отражает фактическое состояние y(t) с некоторой погрешностью, определяемой точностью учета и временным интервалом. Полученные данные у (t) сравниваются со значением эталона "Δ". Если у (t) > Δ, то уровень запаса допустимый и необходимости пополнения запаса и принятия решения о размере партии поставки нет. Если y'(t) < Δ, то уровень запаса снизился до эталона или ниже и требуется определить размер заказа. Поэтому с дискриминатора передается управление блоку принятия решения, который ''обеспечивается" информацией о значениях Q и Т, рассчитанных на момент времени t:
Q(t) = Q – Σ qi (33)
T(t) = T – (t–t0) (34)
Полученное в блоке принятия решений (в момент снижения запаса до уровня Δ) управление передается в исполнительную систему для организации поставки партии элементов в количестве q. После поставки партии значения Q и Т корректируются. Заметим, что поскольку расход элементов случайный, то цикл поставки будет определяться временем снижения уровня запаса до установленной величины неснижаемости запаса.
Описанный процесс отображается в виде блок-схемы модели замкнутой системы управления как показано на рисунке 12. Рисунок 12 - Схема динамической модели управления запасами
Обозначения: → информация => материальные элементы
|
 +
+  ) t, (6)
) t, (6) + s
+ s  T, (7)
T, (7) получим:
получим: есть количество произведенных циклов поставки.
есть количество произведенных циклов поставки. + S
+ S