
Структурный анализ механизма
В плоском механизме предварительно наложенные общие связи лишают каждое из звеньев трех степеней свободы, а именно: вращения вокруг двух координатных осей, лежащих в плоскости движения механизма и скольжения вдоль оси, перпендикулярной этой плоскости. Поэтому кинематические пары могут наложить на относительное движение звеньев, образующих кинематическую пару, либо одно, либо два условия связи. Таким образом, в плоском механизме могут быть только следующие пары: a) Высшие кинематические (например, сопрягающиеся профили зубчатых цилиндрических колес или система профиль кулачковой шайбы - толкатель). Число этих пар механизма будем обозначать p 4. b) Вращательная (шарнир) или поступательная (ползун в направляющих). Число таких пар механизма будем обозначать p 5. Число W степеней свободы каждого из плоских механизмов системы можно определить по формуле Чебышева:
где n – число подвижных звеньев. Для данного механизма число подвижных звеньев равно n = 3 (кривошип 1, шатун 2, ползун 3). Число кинематических пар V-го класса: p 5 = 4. Число кинематических пар IV-го класса: p 4 = 0. Таким образом,
то есть механизм обладает одной степенью свободы.
Кинематическое исследование рычажного механизма Построение планов положений механизма
Построим на чертеже отрезок ОА длиной 40 мм. Тогда масштабный коэффициент для построения планов положений
При этом длина отрезка отр (АВ), изображающего шатун АВ будет равна:
Построим схему механизма в 12-ти положениях.
Построение планов скоростей механизма
Определим скорость точки А:
Вектор полученной скорости перпендикулярен кривошипу ОА и направлен в сторону его вращения. Построим отрезок
По теореме о сложении скоростей скорость точки В равна:
Где При шарнирном соединении двух звеньев скорость какой-либо точки звена складывается из скорости шарнира и скорости точки в ее вращательном движении относительно этого шарнира. Построим план скоростей для выбранного положения механизма, решив векторное уравнение графически. Поскольку по условию задачи угол
Угловую скорость шатуна 2 определяем по формуле (для положения 8):
План скоростей в положении 8
Для механизма, находящегося в положении 8, найдем скорость поршня В:
Построение плана ускорений механизма в положении 8
Т.к. угловая скорость Для определения ускорения точки В воспользуемся теоремой о сложении ускорений (аналогично теореме о сложении скоростей):
Решим векторное уравнение графически, построив план ускорений.
Построим отрезок
Из плана ускорений находим: Угловое ускорение шатуна АВ: Ускорение центра тяжести шатуна АВ: Ускорение точки В:
|
 ,
, ,
, будет:
будет: м/мм
м/мм мм.
мм. м/с.
м/с. мм (графическое изображение
мм (графическое изображение  ). Тогда, приняв, что угловая скорость ведущего звена
). Тогда, приняв, что угловая скорость ведущего звена  постоянна, масштабный коэффициент для планов скоростей будет равен:
постоянна, масштабный коэффициент для планов скоростей будет равен:
 .
. ,
, ,
,  и
и  .
. º, то будем рассматривать план скоростей для механизма, находящегося в положении 8.
º, то будем рассматривать план скоростей для механизма, находящегося в положении 8.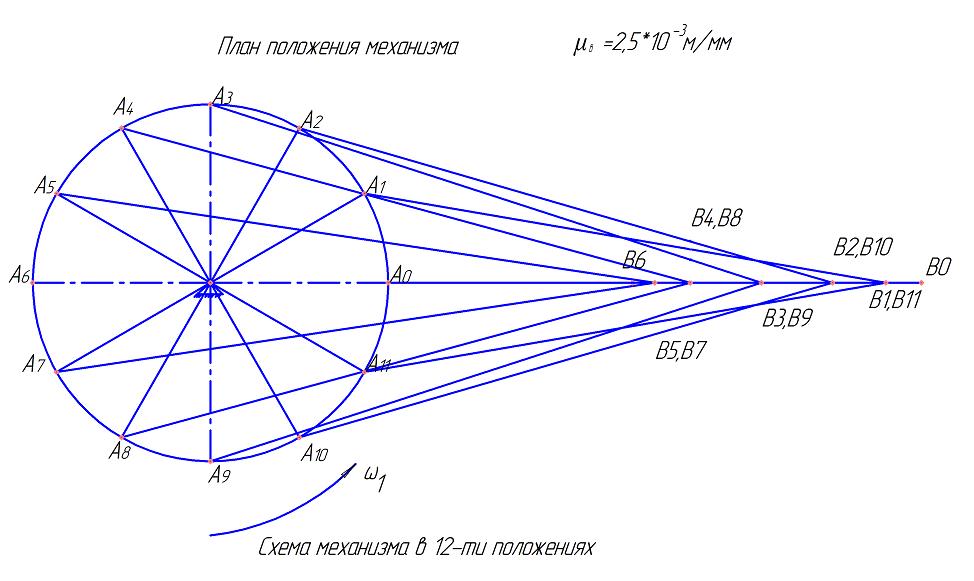
 с-1
с-1
 м/с.
м/с. .
. , или в развернутом виде, зная траектории исследуемых точек:
, или в развернутом виде, зная траектории исследуемых точек:  , где
, где ,
,  ,
,  ,
,  ,
,  ,
, м/с2,
м/с2, м/с2.
м/с2. мм (графическое изображение
мм (графическое изображение  ), тогда масштабный коэффициент для плана ускорений будет равен:
), тогда масштабный коэффициент для плана ускорений будет равен: .
. м/с2.
м/с2. с-2.
с-2. м/с2.
м/с2. м/с2.
м/с2.



