
КИНЕМАТИКА ДВИЖЕНИЯ МАТЕРИАЛЬНОЙ ТОЧКИ. 1.1 Средние векторы скорости и ускорения точки:
1.1 Средние векторы скорости и ускорения точки:
где 1.2 Векторы мгновенных скорости и ускорения:
где
1.3 Модуль мгновенной скорости:
1.4 Путь, пройденный точкой за промежуток времени Δt = t2 – t1: где 1.5 Ускорение точки в проекциях на нормаль и касательную к траектории: · касательное ускорение, которое характеризует быстроту изменения скорости по величине,
· нормальное ускорение, которое характеризует быстроту изменения скорости по направлению,
где R – радиус кривизны траектории в данной точке.
модуль ускорения:
Рис. 1 1.7. Кинематические уравнения равномерного движения для скорости и радиус–вектора:
в проекциях на координатную ось х:
где x0 - начальная координата, t – время движения, 1.8. Кинематические уравнения равноускоренного движения (
в проекциях на координатную ось х:
где 1.9. Путь при прямолинейном движении с постоянным ускорением (
· если скорость тела (точки) не меняет своего направления:
· если же скорость меняет свое направление, то путь складывается из пути до момента изменения скорости и пути после этого момента. 1.10. Средние значения угловой скорости и углового ускорения:
где 1.11. Мгновенные значения угловой скорости и углового ускорения:
где 1.12. Кинематические уравнения равнопеременного вращения (
где 1.13. Связь между линейными и угловыми величинами:
где R – радиус окружности, по которой точка вращается вокруг оси.
|
 ;
;  ,
, - перемещение точки за время Δt,
- перемещение точки за время Δt,  - изменение вектора скорости за время Δt.
- изменение вектора скорости за время Δt. ;
;  .
. - первая производная радиус-вектора по времени,
- первая производная радиус-вектора по времени,  - производная вектора скорости по времени.
- производная вектора скорости по времени. .
. ,
, - модуль скорости точки.
- модуль скорости точки. ;
;  ;
;
 ,
,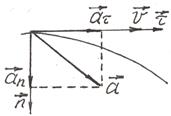 1.6. Полное ускорение при криволинейном движении (рис 1):
1.6. Полное ускорение при криволинейном движении (рис 1): ,
, .
. ;
;  ,
, ;
;  ,
, - проекция скорости на ось х.
- проекция скорости на ось х. ) для скорости и радиус – вектора:
) для скорости и радиус – вектора: ;
;  ,
, ;
;  ,
, -проекция начальной скорости на ось х,
-проекция начальной скорости на ось х,  -проекция ускорения на ось х.
-проекция ускорения на ось х. ),
), ,
, ,
,  ,
, - угол, на который тело повернулось за время
- угол, на который тело повернулось за время  ,
,  - изменение угловой скорости за время
- изменение угловой скорости за время  ,
,  ,
, - производная от угла поворота j радиуса-вектора материальной точки по времени,
- производная от угла поворота j радиуса-вектора материальной точки по времени,  - производная от угловой скорости w по времени.
- производная от угловой скорости w по времени. ) для угловой скорости и угла поворота:
) для угловой скорости и угла поворота: ,
,  ,
, - начальная угловая скорость.
- начальная угловая скорость.
 ;
;  ;
;  ,
,


