
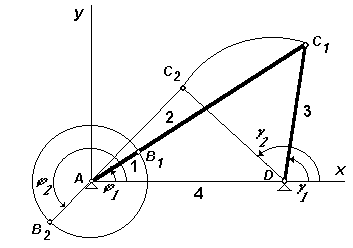
Длины шатуна l2 и кривошипа l1 найти графически в принятом масштабе, исходя из очевидных из рисунка соотношений
откуда,
Рис. 3 1.2.2. Определить графически J32max. Максимальный угол давления со стороны коромысла на шатун J32max будет при j = 0 или 180°. 1.2.3. Проверить выполнение для механизма правила Грасгофа: «Самое короткое звено шарнирного четырёхзвенника может быть кривошипом, если сумма длин самого короткого и самого длинного звеньев меньше суммы длин остальных звеньев». Раздел 2. Статическое уравновешивание плоских четырёхзвенников Задание 2.1.Статическое уравновещивание кривошипно-ползунного механизма Для соосного кривошипно-ползунного механизма, спроектированного в задании 1.1. требуется провести частичное статическое уравновешивание путём постановки противовеса на кривошип.
Как известно, при данном способе уравновешивания, остаётся неуравновешенной сила инерции от поступательного движения ползуна FCx= - mC aCx, где aCx – ускорение движения ползуна в направлении оси х, которое можно определить из выражения aCx = w12 l1 cos j1+(1/l2) w12 l1 cos 2j1 где первое слагаемое определяет силу инерции первого порядка, действующую на ползун, а второе слагаемое - силу инерции второго порядка. Очевидно, что максимальное значение ускорения наблюдается при j1=0: aCxMAX = w12 l1 +(1/l2) w12 l1.
Исходными данными для проектирования являются: длина кривошипа l1, длина шатуна l2, массы кривошипа m1, шатуна m2 и ползуна m3, положения центров масс на звеньях S1 и S2. Длины звеньев принять по результатам выполнения задания 1.1. Массы звеньев рассчитать из соотношения mi=30 li, где li – длина i -того звена в метрах, mi – масса i -того звена в кг. Массу ползуна принять равной массе шатуна. Центр масс кривошипа считать расположенным по середине звена, центр масс шатуна считать расположенным на расстоянии 1/3 длины шатуна от кривошипа. 2.1.1. Перейти от распределённых масс звеньев к массам, сосредоточенным в шарнирах A,B,C (рис. 4): mA = m1 BS1 /AB; mB = m1 AS1 /AB + m2 CS2 /BC; mC = m2 BS2 /BC + m3.
2.1.2. Рассчитать массу противовеса mк1 из соотношения: mк1 = mB l1 / rк1, где расстояние от оси вращения кривошипа до центра масс противовеса rк1 принять в пределах (0,2¸0,4) l1, определить положение центра масс противовеса на схеме механизма, условно обозначить противовес. Рис. 4 2.1.3. Для оценки эффективности частичного статического уравновешивания механизма сравнить, максимальную силу инерции от поступательного движения ползуна FCxMAX= - mC aCxMAX с силой инерции от массы mB: FB= - mB w12 l1, путём расчёта отношения FCxMAX / (FB +FCxMAX)= (mC (1+ l2)) / (mB l2 + mC (1+ l2)), соответствующего доле нескомпенсированной неуравновещенности в общей начальной неуравновешенности механизма. 2.2. Полное статическое уравновешивание кривошипно-коромыслового механизма Исходными данными к выполнению задания являются длины и массы звеньев кривошипно-коромыслового механизма, спроектированного в задании 1.2. Массы звеньев рассчитать из соотношения mi=30 li, где li – длина i -того звена в метрах, mi – масса i -того звена в кг. Центры масс подвижных звеньев Si принять расположенными точно по середине подвижных звеньев. 2.2.1. Перейти от распределённых масс звеньев к массам, сосредоточенным в шарнирах A,B,C,D: mA = m1 BS1 /AB; mB = m1 AS1 /AB + m2 CS2 /BC; mC = m2 BS2 /BC + m3 DS3 /CD; mD = m3 CS3 /CD. 2.2.2. Рассчитать массу противовесов mк1 и mк3 и из соотношений: mк1 = mB l1 / rк1, mк3 = mC l3 / rк3 где расстояния от оси вращения кривошипа до центра масс противовесов rк принять в пределах (0,2¸0,4) l, определить положение центров масс противовесов на кинематической схеме механизма, условно обозначить противовесы.
Раздел 3. Кинематический синтез зацеплений на примере кулачкового механизма Исходными данными к разделу являются: ход толкателя smax, значения фаз подъёма jп ,фазы опускания jоп ,фазы верхнего выстоя jвв ,фазы нижнего выстоя jнв,. Закон изменения аналога ускорения s¢¢ на фазах подъёма и опускания безударный гармонический: s¢¢ =2p sin (2pj /jп ) на фазе подъёма; s¢¢ =2p sin (2pj /jоп ) на фазе опускания, где j - угловая координата, отсчитанная от начала фазы подъёма (опускания). Предварительно, используя приёмы графического интегрирования ([2], § 24; [3],§ 3.4), выполнить построения для закона изменения аналога скорости s¢; и перемещения толкателя s. Исходя из значения хода толкателя и полученного закона его перемещения, последовательно провести расчёт масштабов графика перемещения, аналога скорости и аналога ускорения. Произвести последовательное определение кинематических параметров: хода, аналога скорости и аналога ускорения для всех фазовых положений кулачка с шагом не более 5°. Заполнить соответствующую таблицу.
Задание 3.1. Синтез профиля кулачка с роликовым толкателем 3.1.1. Провести графическое определение минимального радиуса центрового профиля кулачка Rmin, исходя из заданного преподавателем максимального допустимого значения угла давления кулачка на толкатель Jдол. 3.1.2. Провести построение центрового профиля кулачка по результатам замеров и расчётов кинематических параметров с учётом назначенного минимального радиуса центрового профиля кулачка. 3.1.3. Сравнить полученный центровой профиль с профилем тангенсного (профилированного по дугам окружностей и прямым) кулачка. 3.1.4. Произвести графическую оценку по трем соседним точкам минимального радиуса кривизны полученного центрового профиля кулачка rmin 3.1.5. Назначить радиус ролика rр, исходя из соотношений: rр £ 0,8 rmin, rр £ 0,4 Rmin. 3.1.6. Построить профиль кулачка с роликовым толкателем путём последовательного построения контуров ролика.
Задание 3.2. Построение профиля кулачка с тарельчатым толкателем 3.2.1. Назначить минимальным значением радиуса центрового профиля Rmin из условия выпуклости профиля кулачка Rmin > s¢¢max + smax . 3.2.2. Назначить радиус тарелки толкателя из соотношения rТ ³ s¢max. 3.2.3. Построить профиль кулачка с тарельчатым толкателем путём последовательного построения габаритов тарелки. 3.2.4. Сравнить полученный профиль кулачка с профилем кулачка с роликовым толкателем.
Раздел 4. Анализ динамики машинных агрегатов Задание 4.1. Исходными данными к заданию являются структурная схема агрегата (рис.5), значение пускового момента турбины ТП , значения моментов инерции турбины J1, муфты J2 , генератора J3, установившаяся частота вращения nуст. Требуется: 4.1.1. Составить и решить дифференциальное уравнение динамики разбега турбогенератора из состояния покоя до установившейся частоты вращения w уст, исходя из условия изменения суммарного приведённого к валу турбины момента ТS пр в зависимости от частоты вращения w при разбеге по линейному закону ТS пр = А - Вw.
4.1.2. Построить график изменения частоты вращения агрегата во времени n=f(t) по десяти точкам через интервал времени 0,5T, где T=Jпр /В – постоянная времени агрегата. Рис. 5 При решении принять А=ТП - ТПС пр, где ТП - пусковой момент турбины; ТПС пр – приведённый момент полезного сопротивления (в режиме холостого хода ТПС пр =0). Значение В может быть найдено из соотношения В = А/w уст. Задание 4.2. Исходными данными к заданию являются структурная схема агрегата (рис.6),, значения моментов инерции генератора J3, турбины J1 , шестерни J2 и колеса J4 установившаяся частота вращения турбины nуст, передаточное число передачи uпр .
Требуется: 4.2.1. Составить и решить дифференциальные уравнения выбега агрегата от установившейся частоты вращения до состояния покоя: 4.2.1.1. Под действием постоянного момента сопротивления ТСТ, приложенного к валу турбины; 4.2.1.2. Под действием постоянного момента сопротивления ТСГ, приложенного к валу генератора.
Рис. 6 4.2.2. Найти численные значения моментов сопротивления ТСТ и ТСГ, требуемых для обеспечения выбега агрегата в течение одной минуты, сравнить полученные значения, сделать выводы.
Исходные данные к выполнению контрольных заданий приведены в приложении 2.
Графические построения (кинематические схемы механизмов) в заданиях разделов 1 и 2 выполнять на формате А4 в принятых масштабах.
Графические построения (интегрирование и профилирование кулачков) в заданиях раздела 3 выполнять на формате А3 в принятых масштабах.
РЕКОМЕНДУЕМАЯ ЛИТЕРАТУРА 1. Левитская О.Н., Левитский И.И. Курс теории механизмов и машин. - М.: Высш.шк., 1978. - 269 с. 2. Артоболевский И.И., Эдельштейн Б.В. Сборник задач по теории механизмов и машин. - М.: Наука, 1973. - 256 с. 3. Теория механизмов и машин: Учеб. для втузов/ К.В. Фролов, С.А. Попов, А.К. Мусатов и др.; Под ред. К.В. Фролова. – М.: Высш. шк., 1987. - 496 с. 4. Теория механизмов и динамика машин: Учеб. для вузов/ К.В. Фролов, С.А. Попов, А.К. Мусатов и др.; Под ред. К.В. Фролова. - 3-е изд., перераб. и доп. – М.: Высш. шк., 2002. – 487с. 5. Курсовое проектирование по теории механизмов и механике машин: Учеб. пособие для вузов/ С.А. Попов, Г.А. Тимофеев; Под ред. К.В. Фролова. - 4-е изд., перераб. и доп. - М.: Высш. шк., 2002. - 411 с.
Приложение 1
|

 .
.





