
АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД НА ОСНОВЕ ПРЕОБРАЗОВАТЕЛЯ ЧАСТОТЫ
1. Цель работы: а) изучить основные принципы частотного регулирования асинхронными трехфазными электродвигателями; б) получить практические навыки работы с микропроцессорной системой управления асинхронными электродвигателями, в основу которой положен частотный метод управления. 2. Общие сведения. 2.1 Создание момента в асинхронном двигателе. Когда ротор находится в неподвижном состоянии, вращающий поток, вызываемый током статора, индуцирует напряжение в проводниках ротора, а так как ротор - короткозамкнутый, по нему протекают значительные токи. В результате, двигатель работает, как короткозамкнутый трансформатор: токи ротора сбалансированы равными по величине и противоположными по направлению токами статора таким образом, что магнитодвижущая сила и потокосцепление близки к своим исходным значениям. Токи ротора, взаимодействуя с потоком в воздушном зазоре, создают силы поворачивающие ротор, и уменьшают индукцию в роторе. Следовательно, ротор начинает вращаться в том же направлении, что и вращающее поле. С увеличением скорости вращения ротора проводники ротора пересекают вращающее поле (которое вращается с постоянной скоростью, определяемой частотой тока статора) более медленно и, в результате, частота тока ротора уменьшается. В общем случае, частота тока ротора равна разнице между скоростью вращения поля статора и скоростью вращения самого ротора. Значение напряжения, индуцируемого в проводниках ротора, будет также зависеть от разницы между скоростью вращения поля и ротора. Это напряжение и, как результат, ток будут уменьшаться с увеличением скорости. Значение генерируемого момента - более сложная величина, которая также зависит от сдвига фаз между токами ротора и потоком статора. Если индуцируемый эффект в роторе значителен, ток будет отставать по фазе и создаваемый момент будет уменьшен. Когда ротор находится в неподвижном состоянии, по нему протекают токи значительной частоты. Следовательно, индуцируемый эффект в роторе более значителен, чем при вращении на большой скорости, когда частота тока ротора мала. Наконец необходимо заметить, что если ротор вращается с той же скоростью, что и вращающее поле, в роторе не будут индицироваться токи и, следовательно, создаваться момент. Следовательно, двигатели никогда не работают в этом состоянии: ближайшее состояние - малая нагрузка.
2.2. Работа при фиксированном напряжении и фиксированной частоте. На рис.1 показаны характерные кривые, отражающие работу двигателя от источника фиксированного напряжения и частоты.
Рис. 1. Характеристики двигателя переменного тока при фиксированной частоте.
Критической точкой на этих кривых является пиковое значение на кривой момента. При скоростях выше данной индукция в роторе относительно незначительна и значение соотношения создаваемого момента на ампер (M/I) велико. При скоростях ниже данной индукция имеет доминирующее действие, что приводит к уменьшению создаваемого момента с уменьшением частоты. Для того, чтобы обеспечить достаточно высокий момент при пуске были приняты определенные меры. Благодаря поверхностному эффекту можно достичь увеличения сопротивления ротора на низких скоростях, что позволяет предотвратить доминирование индукции в роторе и, следовательно, уменьшение генерируемого момента. Это свойство используется в большинстве двигателей с «беличьей клеткой». Из характеристик четко следует, что условия работы справа от пикового момента значительно лучше, чем при других скоростях. Значение КПД, коэффициент мощности, соотношение момент на ампер - высоки. Кроме того, из механической характеристики следует, что обеспечивается устойчивая работа, т.к. увеличение момента соответствует незначительному снижению скорости. По этой причине рабочая зона асинхронных двигателей находится рядом с синхронной скоростью: текущая скорость вращения зависит от момента, определяемого нагрузкой. Не смотря на то, что ротор всегда вращается со скоростью, меньшей скорости вращения поля (в нормальном двигательном режиме), магнитные поля, генерируемые токами статора и ротора, вращаются с одинаковыми скоростями в воздушном зазоре. Ротор всегда создает вращающее поле, которое вращается с частотой тока ротора. Сумма частоты вращения ротора и частоты тока ротора должна быть всегда равна скорости вращения поля статора, т.е. поля всегда синхронны, не зависимо от скорости вращения ротора. С электрической точки зрения работа двигателя очень напоминает трансформатор, а ток ротора сбалансирован равным по величине и противоположным по направлению током статора. Ток статора состоит из двух компонент: прямое отображение тока ротора и необходимое значение тока намагничивания для создания потока. Ток намагничивания в двигателе значительно больше тока намагничивания в трансформаторе из-за относительно большого воздушного зазора между ротором и статором, через который должно пройти магнитное поле.
2.3. Асинхронный двигатель, как двигатель регулируемой частоты.
Оценка двигателя при питании от сети фиксированной частоты применима и если синусоидальные напряжения любой другой частоты прикладываются к двигателю, при условии, что поток в воздушном зазоре остается на прежнем уровне. Это означает, что если такой двигатель питается от источника изменяемого напряжения и частоты, можно построить любое число комплектов кривых, аналогичных показанным на рис. 1 – по одному комплекту для каждой частоты. На рис. 2 показана типичная последовательность механических характеристик, которые получаются при питании двигателя от источника изменяемой частоты и напряжения (напряжение меняется прямо пропорционально частоте). Важным является то, что всегда существует возможность работы в зоне справа от пикового момента, т.е. в области максимального КПД, соотношения M/I и устойчивости при любой требуемой скорости. При работе от такого источника питания двигатель всегда может работать при наиболее выгодных условиях (без высоких токов, низких моментов и КПД) при любых скоростях. При этом предполагается, что такой источник питания двигателя имеет природу, аналогичную промышленной сети, т.е. форма напряжения – синусоидальная, внутреннее сопротивление источника питания – мало. На практике большинство инверторных систем, как будет показано позже, не эквивалентны промышленной сети и возможности и способы работы инверторов могут не позволить использовать все потенциальные возможности двигателя.
Рис. 2. Механические характеристики двигателя при различных частотах Другим важным моментом является то, что большинство инверторных систем для асинхронных двигателей позволяют контролировать все параметры цепи, т.е. частота, уровень тока, уровень напряжения могут быть изменены независимо друг от друга, для достижения оптимальной рабочей зоны. Рассмотрим по очереди к чему приводит изменение каждой их этих величин.
Частота Изменение частоты тока, подаваемого на двигатель, приведет к изменению скорости вращения вращающего поля статора и, следовательно, синхронной скорости двигателя. Т.к. момент создается за счет разности скоростей ротора и вращающего поля, скорость двигателя будет немного меньше, чем синхронная скорость. Тем не менее, подавая частоту, немного превышающую данную, возможно задать требуемую скорость вращения двигателя. Т.е. теперь возможно компенсировать незначительное падение скорости (относительно синхронной), присущее двигателям. Т.е. теперь двигатель не ограничен частотой питающей сети в 50 Гц. Если механическая часть двигателя позволяет работать на более высоких скоростях, нет причины, ограничивающей бы эксплуатацию двигателя, например, на частоте 69.77 Гц. Таким образом, теперь для двигателя, предназначенного для работы от сети, существует возможность полной реализации всех его потенциальных возможностей. Одно из ограничений возникающее при этом состоит в том, что охлаждение двигателя может быть недостаточным и, следовательно, двигатель может оказаться неспособным потреблять такие же токи и соответственно создавать момент, как при больших скоростях. Дополнительное преимущество подключения двигателя к источнику изменяемой частоты состоит в том, что всегда есть возможность уменьшить частоту таким образом, чтобы вывести двигатель в генераторный режим и обеспечить торможение с рекуперацией энергии в инвертор. Т.е. пока инвертор способен поглощать энергию от двигателя и исполнительного механизма есть возможность полного управления процессом торможения.
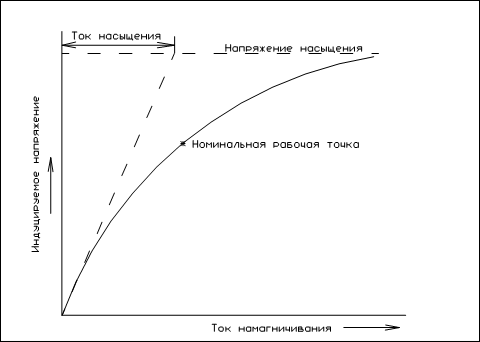
Напряжение Как и во всех индуктивных элементах электрических цепей, в обмотке статора асинхронного двигателя индуцируется напряжение (благодаря потоку в магнитопроводе), которое приблизительно равно по величине и противоположно по направлению прикладываемому напряжению. Токи протекают по обмотке благодаря разнице между прикладываемым и индуцируемым напряжением, ограниченные только сопротивлением обмотки. Таким образом, обмотка статора подчиняется обычным законам магнитных цепей, в соответствии с которыми индуцируемое напряжение пропорционально: поток ´ частота ´ число витков и, следовательно, если необходимо сохранить оптимальное и постоянное значение потока, напряжение необходимо изменять пропорционально частоте. Тем не менее, как было сказано выше, это не всегда необходимо. Уровень напряжения, а, следовательно, поток могут быть легко изменены, при необходимости. Увеличение потока приведет к созданию большего момента, а единственным ограничением на увеличение потока являются большие потери в железе и больший ток намагничивания. На первый взгляд, уменьшение потока уменьшением напряжения может быть полезным, но эффективно это используется лишь в двух целях. Если значительные периоды времени двигатель эксплуатируется с незначительной нагрузкой, потери в железе можно значительно уменьшить, снизив поток. Наиболее частый случай, допускающий снижения потока, встречается при необходимости обеспечения высоких скоростей без увеличения напряжения выше номинального (чтобы не допустить пробоя изоляции). Эксплуатация двигателя на частотах, превышающих номинальную на 50%, может свободно достигаться при снижении потока. Уменьшение подаваемого напряжения и потока также используется, как средство защиты двигателя. Если по какой-либо причине в двигателе протекают недопустимо высокие токи (например, при блокировке вала двигателя), то, благодаря возможности снижения напряжения, их можно избежать. На рис.3 показаны основные зависимости, связанные с изменением потока. Из-за насыщения ток намагничивания должен увеличиваться на больший коэффициент, чем увеличивается поток. Создаваемый момент будет увеличиваться пропорционально потоку, если моментная составляющая тока поддерживается постоянной.
Ток. Момент, развиваемый асинхронным двигателем, является результатом взаимодействия потока в воздушном зазоре и токов в проводниках ротора. При работе в зоне, близкой к синхронной скорости с низкими значениями скольжения значение коэффициента мощности велико и генерируемый момент практически пропорционален протекающему току. Поэтому управление током ротора обеспечивает прямое управление моментом двигателя при низких уровнях скольжения. Ток статора содержит составляющую, эквивалентную току ротора, зависящую от коэффициента трансформации между ротором и статором, но он также содержит магнитную составляющую, вызывающую МДС и, следовательно, поток в магнитопроводе. Примем допущение, что скорость вращения ротора и токи, протекающие в нем, не влияют на магнитопровод и, следовательно, логично предположить, что требуемый ток намагничивания двигателя почти не зависит от скорости вращения, т.е. МДС, требуемая для создания номинального потока, одинакова, при какой бы скорости двигатель не вращался. Тем не менее, действующее сопротивление магнитной цепи изменяется с изменением прикладываемой частоты и, как было сказано выше, если необходимо поддерживать постоянный ток намагничивания и поток, то необходимо изменять напряжение пропорционально частоте. Поэтому, в общем случае, управление током асинхронного двигателя позволяет управлять уровнем создаваемого момента, пока сохраняется низкий уровень скольжения. 1.4 Характеристики при изменении частоты.
При эксплуатации двигателя от источника регулируемой частоты при условии сохранения низких уровней скольжения наиболее важными характеристиками являются характеристики, показанные на рисунках 4, 5, 6. На рис.4 показана взаимосвязь между прикладываемым напряжением и частотой, обеспечивающая требуемый поток в воздушном зазоре двигателя. Постоянное значение U / f обеспечивает постоянство потока в большом диапазоне.
На низких скоростях падение напряжения в проводниках статора становится более значительным по отношению к прикладываемому напряжению, и для обеспечения требуемого уровня потока необходимо прикладывать большие значения напряжения. Зависимость между моментом и током почти не меняется с изменением частоты. На рис. 5 показано, что момент и ток имеют линейную зависимость, если уровень потока поддерживается постоянным. Окончательным набором характеристик, определяющим способность асинхронного двигателя работать от источника регулируемой частоты, являются зависимости момента от скорости скольжения (рис. 6). Скорость скольжения это разница между скоростью вращения поля статора и скоростью ротора. Как показано на рисунке, момент и скорость скольжения зависят друг от друга напрямую, но уменьшение потока приводит к увеличению скорости скольжения при том же значении момента.
Рис. 6. Характеристики Момент/Скорость скольжения. 1. 5 Эквивалентная цепь асинхронного двигателя Для понимания электрических процессов в двигателе при всех условиях работы представим двигатель эквивалентной цепью, полностью характеризующей его работу. Исходя из эквивалентной цепи, можно будет определить векторную диаграмму и вывести систему уравнений для оценки работы двигателя. Так как магнитные поля, создаваемые статором и ротором, вращаются в воздушном зазоре с одинаковой скоростью, можно представить двигатель, как трансформатор с количеством витков обмотки статора (первичной обмотки) Т1 и обмотки ротора (вторичной обмотки) Т2. Однако по обмотке статора протекает ток частотой f1, равной частоте источника питания двигателя, а по ротору - ток частотой скольжения, определяемой, как разность между скоростью вращения ротора и скоростью вращения поля статора.
Рис. 7 Эквивалентная цепь одной фазы асинхронного двигателя На рис. 7(а) показан эквивалент одной фазы асинхронного двигателя, где: R2 действительное сопротивление ротора на фазу; L2 индуктивность рассеяния ротора на фазу; R1 сопротивление статора на фазу; L1 индуктивность рассеяния статора на фазу. Потери в магнитной цепи, в железе (магнитопроводе), представленные наличием сопротивления R1 и магнитным сопротивлением, определяющих ток намагничивания, показаны подключением параллельно первичной обмотке трансформатора. На данном рисунке частота тока ротора определяется, как: f2 = S1 ´ f1, где S1 - относительное значение скольжения, а E2 соотносится с напряжением Е1, индуцируемом в статоре, как: E2 = S1 ´ E1 ´ T2/T1. Если ротор двигателя имеет обмотку (двигатель с фазным ротором), то необходимо учесть, как активное, так и индуктивное сопротивление. Хотя данная эквивалентная цепь может быть использована для оценки работы двигателя, это не совсем легко из-за двух различных частот. Поэтому данную цепь обычно упрощают, приводя все параметры ротора к параметрам статора. Это может быть выполнено в два этапа, как показано на рисунках 7(b) и 7(c). Первый этап состоит в изменении значений цепи ротора, исходя из уравнивания числа витков первичной и вторичной обмоток таким образом, чтобы получить более простую зависимость между напряжениями статора и ротора. Это показано на рисунке 7(b), где R2¢ - сопротивление ротора, приведенное к обмотке статора, L2¢; - эквивалент L2. Если пренебречь неидеальным взаимодействием обмоток, то приблизительно R2¢ = R2 ´ (T1/T2)2 L2¢ = L2 ´ (T1/T2)2 E2¢ = E1 ´ S1. Второй этап упрощения состоит в уходе от представления трансформатора с одновременным делением всех параметров ротора на значение скольжения. Результаты показаны на рис. 7(с), где частота ротора теперь равна f1, а напряжение ротора Е1. На данном рисунке: Iмаг - ток намагничивания статора, требуемый для создания необходимого потока и необходимой противоЭДС Е1 в обмотке статора; (IL)2 ´ RL - потери в магнитопроводе; (I1)2 ´ R1 - потери в меди обмотки статора; (I2)2 ´ R2¢/S1 - общая мощность, проходящая через воздушный зазор; (I2)2 ´ R2¢; - потери в меди ротора; общая механическая мощность на валу двигателя (включая потери на трение и вентиляционные потери), определяемая как разность между (d) и (e), равна (I2)2 ´ R2¢((1-S1)/S1). Для более правдивого представления данной эквивалентной цепи по отношению к условиям изменяемой частоты необходимо отметить несколько моментов: Сегодня стандартные асинхронные двигатели с «беличьей клеткой» обычно включают в себя глубокие пластины ротора, сопротивление которых изменяется с частотой тока ротора из-за эффекта скольжения, таким образом, что его сопротивление в неподвижном состоянии больше, чем при вращении, когда частота тока ротора очень мала. Значение сопротивления ротора в неподвижном состоянии в четыре раза больше, чем при вращении. Индуктивность ротора может также изменяться с изменением частоты тока ротора. Тем не менее, эта информация используется и требуется только для изучения работы двигателя при значительных уровнях скольжения, при частотном регулировании в ней нет необходимости до тех пор, пока скольжение мало. Для частотного регулирования эквивалентом значений R2¢; и L2¢; могут быть их значения при низкой частоте. Ток намагничивания Iмаг, как правило, нелинейно зависит от индуцируемого напряжения, так как двигатели конструируются исходя из достижения значения потока в магнитопроводе близкого к насыщению. Рис. 8 является типичным и будет использован в дальнейшем.
Рис. 8 Кривая тока намагничивания
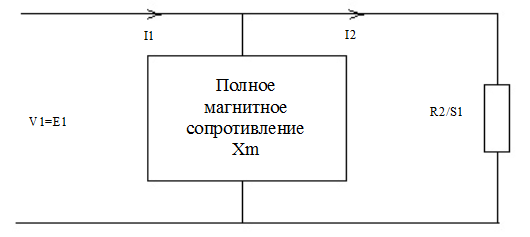
Дальнейшее упрощение Трудоемкость расчетов, основанных на данной эквивалентной цепи, может оказаться неоправданно велика в некоторых случаях. В этих случаях можно прибегнуть к дальнейшему упрощению эквивалентной цепи, полагая при этом, что скольжение по прежнему остается незначительным. Упрощение основывается на следующем: Т.к. скольжение мало (см. рис. 7) магнитная составляющая сопротивления ротора R2¢/S1 всегда на много больше, чем Х2¢; и, следовательно, без большой степени ошибки значением Х2¢; можно пренебречь. Если необходимо проследить лишь общие тенденции работы двигателя, то можно пренебречь падением напряжения в обмотке статора. Аналогично, можно пренебречь потерями в магнитопроводе, т.к. они относительно малы. Результат упрощения эквивалентной цепи показан на рис. 9.
Рис. 9. Упрощенная эквивалентная цепь. 1.6 Векторная диаграмма Для общего понимания может быть полезна векторная диаграмма, построение которой будет выполняться при следующих условностях Предполагается, что вектора вращаются в направлении против часовой стрелки. Вектор потока опережает вектор индуцируемого им напряжения на 90°. Необходимо заметить, что вектор потока является результатом взаимодействия МДС 3х фаз. Вектор тока намагничивания, создающий поток, показан в фазе с вектором потока. Векторы падения напряжения в сопротивлении показаны в противофазе с током. Векторы падения напряжения в индуктивности показаны отстающими от вектора тока на 90°.
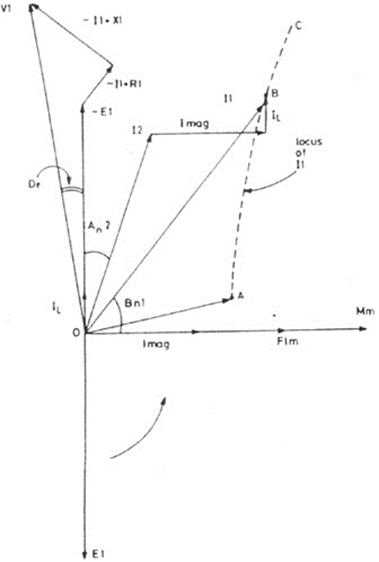
Рис. 10. Векторная диаграмма асинхронного двигателя. Вектор потока (см. рис. 10) Ф1м показан горизонтально и это индуцирует напряжение Е1 в обмотке статора. Вектор тока I2 показан отстающим от противоЭДС (-E1) из-за индуктивности ротора L2¢;. Ток намагничивания Iмаг находится в фазе с вектором потока и ток потерь в магнитопроводе IL находится в фазе с противоЭДС (-E1). Выполняя векторное сложение с I2, получаем I1 - ток статора. Ток статора вызывает падение напряжения в R1 и L1 и разница между прикладываемым напряжением V1 и индуцируемым (-Е1) составляет I1´R1 + I1´X1. Данная диаграмма включает все основные параметры и может быть использована для определения работы двигателя на всем диапазоне регулирования с приемлемой степенью точности. Упрощенная векторная диаграмма В соответствии с упрощенной эквивалентной цепью (см. рис. 9) можно построить упрощенную векторную диаграмму. На практике угол a мал из-за условий работы с малым уровнем скольжения, и его можно принять равным нулю. Угол g также мал на большинстве диапазона регулирования. На рис.11 показана упрощенная векторная диаграмма, соответствующая упрощенной эквивалентной цепи.
Векторная диаграмма при изменении частоты При эксплуатации двигателя от частотно-регулируемого привода обычно необходимо сохранить значение потока Ф1м постоянным в регулируемом диапазоне частот соответствующим изменением напряжения и частоты. В результате, единственным серьезным фактором, который можно изменять на векторной диаграмме является величина соотношения вектора напряжения к вектору тока. Векторы напряжения V1 и -E1 уменьшаются с уменьшением частоты, но все вектора по отношению к векторам тока остаются практически неизменными при одинаковых значениях нагрузочного момента. Причиной этого является то, что при уменьшении частоты уменьшается реактивная составляющая сопротивления ротора Х2 и так как при том же значении момента увеличивается скольжение, соотношения параметров цепи ротора остаются неизменными, таким образом угол a изменяется незначительно. Единственной обратной стороной является то, что значение IL уменьшается с уменьшением частоты таким образом, что при малой частоте геометрическое место точек вектора I1 будет очень незначительно отличаться от исходного геометрического места точек АВС.
Рис. 11. Упрощенная векторная диаграмма 1.7 Уравнения и соотношения в асинхронном двигателе Расчеты токов и напряжений двигателей лучше выполнять исходя из эквивалентной цепи и векторной диаграммы двигателя (см. рисунки 7(с) и 10). Наиболее прямой подход заключается в первоначальном предположении того факта, что всегда имеется постоянное значение потока в воздушном зазоре двигателя, т.к. при этом условии работает большинство двигателей, питаемых от частотно-регулируемого привода. Более строгий подход, предполагающий оценку работы при различных значениях потока, будет описан позже. Уравнения при постоянном потоке При условии постоянного потока значение индуцируемого напряжения Е1 будет всегда прямо пропорционально подаваемой частоте. Скорость скольжения будет также практически линейна по отношению к моменту. Если принять, что скольжение при номинальном моменте Mном и номинальной частоте f ном равно Slном, то скорость скольжения определяется, как: Скорость скольжения = где Р - число полюсов двигателя, и поэтому скорость скольжения при любом конкретном моменте M определяется, как: Sск = M/Mном ´ (Slном ´ 120 ´ fном /P) и поэтому скольжение S1 при любой частоте f определяется, как: S1 = Скорость скольжения / синхронную скорость =
Теперь возможно определить параметры цепи ротора при любых условиях. Полное сопротивление цепи ротора Z2 определяется, как: Z2 = Так как мы предполагаем, что поток постоянен, то:
где Eном номинальное значение индуцируемого напряжения. Поэтому E1 = Eном ´ f / fном Ток ротора определяется, как: I2 = E1/Z2 Значение угла коэффициента мощности тока ротора a может быть определен, как: tan (a) = Поэтому a = arctan Так как предполагается, что поток постоянен, то значение тока намагничивания остается неизменным для всех условий работы. Ток потерь IL будет изменяться с изменением Е1 IL= Е1/R1 Следовательно, вертикальная составляющая тока I1 определится, как: Iакт = I2 ´ cos (a) + IL а реактивная составляющая Iреакт = I2 ´ sin (a) + Iмаг Поэтому I1 = и b = arctan (Ipower/ Ireact) Наконец V1 может быть найдено прибавлением значения падения напряжения в R1 и L1: Вертикальная составляющая V1 определяется, как: Vакт = E1 +I1´X1´cos(b) + I1´R1´sin(b) а реактивная составляющая Vреакт = I1´X1´sin(b) - I1´R1´cos(b) V1 = и угол g = arctan (Vreact/ Vpower) Исходя из этого коэффициент мощности двигателя Pfm = sin (b-g) Электрические потери мощности в одной фазе двигателя: Потери мощности = (I1)2´R1 + (I2)2´R2 + (E1)2/RL а общие потери мощности двигателя в трех фазах - в три раза больше. Скорость двигателя: S = (1-S1) ´ (120 ´ f/P) [об/мин] Механическая мощность на валу двигателя: Мощность на валу = 2 ´ p ´ S ´ M/60 [Ватт] Если момент измеряется в Ньютонах, то скорость будет в об/мин.
Система управления Электрическая функциональная схема электропривода приведена на рисунке она имеет классическую структуру силовой части и состоит из асинхронного двигателя с короткозамкнутым ротором; трехфазного мостового инвертора на модулях IGBT (VT и VD); сглаживающего фильтра L0, С0 с разрядным резистором R0; демпфирующей цепи R1, С1; трехфазного мостового выпрямителя на диодных модулях UZ. Управляющим ядром электропривода является микропроцессорный контроллер, выполненный на однокристальной микроЭВМ с аналоговыми и цифровыми выходами DSP-10A (K1899BE1), которая по своим аппаратным возможностям и системе команд относится к классу сигнальных микропроцессоров. Однако более эффективное решение достигается с использованием 16-разрядного высокопроизводительного микроконтроллера фирмы INTEL серии MCS-96 8´C196MC или 8´C196MH. Процессор 8´C196MH является разработкой 1995 года и относится к классу микроконтроллеров для прямого цифрового управления двигателями. Он отличается от расширенным объемом памяти 32Кбайта (16Кбайт для МС) и внутренней регистровой памяти данных 768 байт (против 512 в МС). Кроме того, усовершенствована система ввода-вывода последовательной информации, что позволяет строить высокопроизводительные мультимикропроцессорные системы управления. Главная особенность микроконтроллеров МС/МН - интеграция на кристалле значительного количества периферийных устройств, специально ориентированных на управление двигателями.
Для ввода-вывода информации служит пульт управления DS с командными кнопками, светодиодным дисплеем, а также устройство сопряжения ТВ, обеспечивающее обмен электрическими сигналами и информацией с внешними объектами. Транзисторы IGBT имеют полевой вход и управляются через драйверы UD двухполярным напряжением, «верхние» драйверы на рисунке питаются от гальванически развязанных источников U1, U2, U3, а нижние от одного источника U4, общего для них и устройства быстродействующей защиты транзисторов от сквозных токов FA. Непосредственно в преобразователе имеется минимально необходимое количество датчиков, измеряющих напряжение сети UC (трансформатор вторичного источника питания), ток сети IC (трансформатор тока TAC) и токи в фазах двигателя Ia, Ib (трансформаторы тока TAa,TAb).
Преобразователи частоты 3.1 Преобразователи частоты Для бесступенчатого регулирования скорости вращения короткозамкнутого асинхронного двигателя (АД) используют преобразователи частоты (ПЧ). Силовая часть ПЧ, как правило, состоит из неуправляемого выпрямителя, конденсатора в промежуточном контуре постоянного напряжения и автономного инвертора с формированием в обмотки статора тока или напряжения по методу синусоидальной широтно-импульсной модуляции (ШИМ). Что касается систем автоматического управления (САУ) ПЧ, то существует много вариантов их реализации. Фирмы-производители тщательно скрывают принципиальные моменты построения САУ. Основное количество ноу-хау относится к определению параметров схемы замещения АД (режим Auto tuning) и к определению скорости вращения ротора АД косвенным методом по измеренным величинам тока и напряжения статора АД (Идентификатор состояния АД). Системы автоматического управления приводами переменного тока удобно подразделить на скалярные и векторные. Скалярные САУ формируют в обмотке статора амплитуду и частоту напряжения или тока. В случае управления по вольт-частотной характеристике (U/f) САУ формирует в обмотки статора напряжение с амплитудой U и частотой f. В случае частотно-токового управления в обмотки статора формируются амплитуда тока I и частота f. Предложенное F. Blaschke в 1972 г. управление с ориентированием потока, названное векторным управлением, сделало возможным управление АД как двигателем постоянного тока с независимым возбуждением. С тех пор было проведено большое число дополнительных исследований этого метода, обеспечивающего хорошие динамические характеристики, и уже имеется много его промышленных применений. W. Leonard в 1975 г. выполнил аппроксимацию предложенного F. Blaschke управления с ориентированием потока. Основная его идея состоит в приведении системы уравнений трехфазного АД к ортогональной системе координат x, y, в которой переменные представляют как установившиеся величины постоянного тока. Фазу и амплитуду тока статора путем раздельного регулирования составляющих тока статора регулируют таким образом, чтобы составляющая тока, создающая поток, оставалась постоянной, а регулирование момента осуществлялось только изменением составляющей тока создающей момент АД. Иначе говоря, САУ с векторным управлением предполагает формирование в обмотке статора амплитуды напряжения или тока, частоты напряжения или тока и угла между вектором магнитного потока АД и вектором тока или напряжения. Т.е. в обмотке статора формируется не амплитуда тока или напряжения, а их мгновенные значения. Векторные САУ можно подразделить на САУ с регулированием напряжения (ПЧ работает в режиме источника напряжения) и с регулированием тока (ПЧ работает в режиме источника тока). Наиболее часто на практике используют векторные САУ с регулированием тока. По типам, используемым в САУ обратным связям (ОС) для определения магнитного потока и скорости вращения ротора векторные САУ можно разделить: САУ с ОС по магнитному потоку и ОС по скорости вращения ротора (прямой метод измерения потока, прямой метод измерения скорости); САУ с ОС по скорости вращения ротора (косвенный метод определения магнитного потока, прямой метод измерения скорости); Бессенсорные САУ (косвенный метод определения магнитного потока и косвенный метод определения скорости вращения ротора). Самые лучшие динамические характеристики, при прочих равных условиях, естественно, могут быть получены в САУ с прямым определением магнитного потока и скорости ротора, но из-за того, что прямое измерение магнитного потока сопряжено с известными трудностями (встраивание датчиков Холла в обмотки статора) эти САУ используются только для высокоточных электроприводов.
Самыми распространенными САУ в настоящее времени являются системы с использованием косвенных методов определения магнитного потока. Причем, наблюдается тенденция более динамичного развития бессенсорных САУ (САУ без обратной связи по скорости и без обратной связи по магнитному потоку).
Рис.13. Вольтчастотные характеристики 3.2.Скалярные САУ. Управление АД по вольтчастотной характеристике При управлении АД по вольтчастотной характеристике (ВЧХ) ПЧ работает в режиме источника напряжения и формирует в обмотки статора АД амплитуду и частоту напряжения по одному из известных законов частотного регулирования. Практически все фирмы производители ПЧ предусматривают возможность выбора вида ВЧХ (закона частотного управления), причем выбор может производить пользователь в зависимости от того, на какую нагрузку работает АД путем несложных манипуляций с клавиатурой встроенного в ПЧ пульта управления. Например, фирма HITACHI, Япония в ПЧ серии J300 предлагает на выбор три ВЧХ рис.13. Прямолинейную ВЧХ; ВЧХ с ослаблением момента в 1.5, 1.7, 2.0 раза по сравнению с прямолинейной ВЧХ, см. рис.13a-d. При использовании ПЧ в качестве регуляторов скорости вращения АД приводящих в движения механизмы со статическим моментом сопротивления типа "сухого" трения (момент сопротивления не зависит от скорости вращения ротора, Мс=Const) ПЧ необходимо запрограммировать на работу в режиме линейной ВЧХ (рис13a). В некоторых механизмах в первоначальный момент пуска силы трения могут существенно превышать их значения при движении. Для таких механизмов необходимо использовать кусочно-линейную ВЧХ (рис13а; кривая, изображенная штриховой линией) или использовать режим векторного регулирования. В противном случае АД может не стронуть механизм с места. В ПЧ фирмы Hitachi есть возможность на "ходу" изменять изгиб ВЧХ, с тем, чтобы индивидуально подобрать ВЧХ для данного механизма. Вольтчастотные характеристики с ослаблением момента используются в том случае если ПЧ приводит в действие АД механизма с вентиляторной нагрузкой. Если, при этом, ПЧ работает в контуре с ОС по технологическому параметру, например, давлению на выходе центробежного насоса, то может быть получен существенный энергосберегающий эффект (до 50% экономия по электроэнергии и 20% экономия по воде при среднесуточном снижении скорости насоса на 20%). Преобразователи частоты серий L100, SJ100, J300, JE300 фирмы Hitachi укомплектованы ПИД-регулятором для включения ПЧ в контур регулирования с ОС по технологическому параметру (давлению, расходу, уровню жидкости в емкости, температуре, скорости). Наибольшим энергосберегающим эффектом обладает вольтчастотная характеристика с ослаблением
|
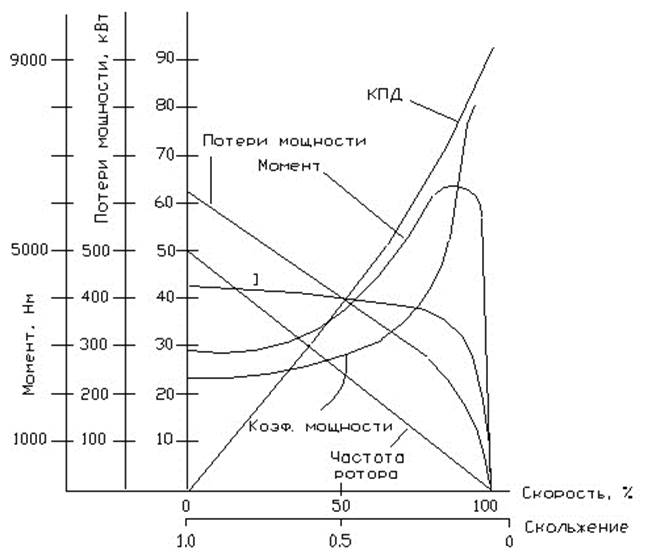
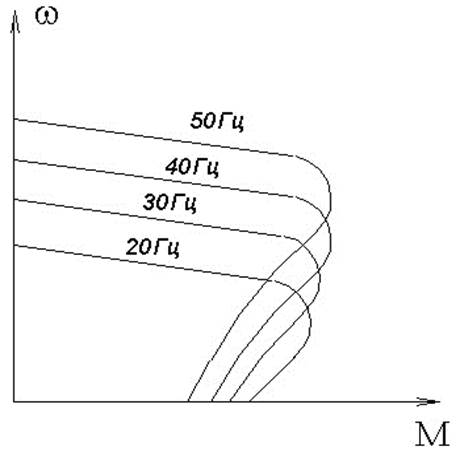
 Рис. 3. Зависимости потока
Рис. 3. Зависимости потока Рис. 4. Зависимости изменения напряжения с изменением частоты.
Рис. 4. Зависимости изменения напряжения с изменением частоты.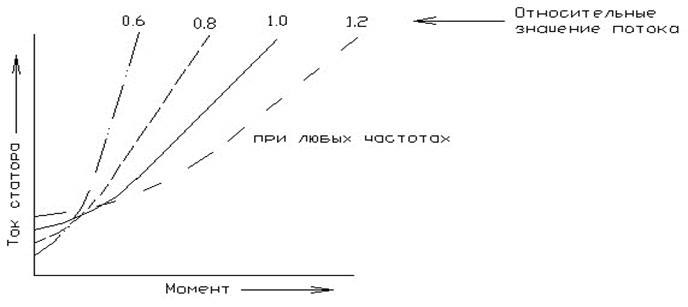 Рис. 5. Характеристики Момент/Ток.
Рис. 5. Характеристики Момент/Ток.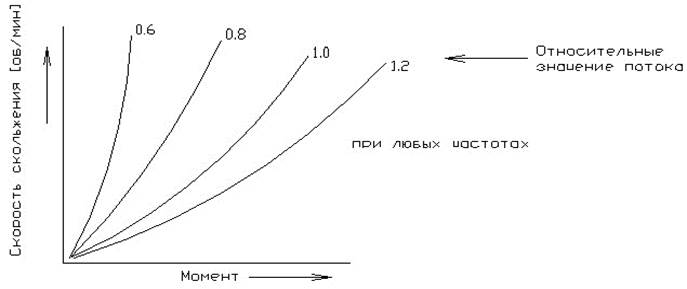


 [об/мин],
[об/мин],


 ,
,



 Рис.12 Электрическая функциональная схема электропривода.
Рис.12 Электрическая функциональная схема электропривода.



