Методы створных измерений.Створные наблюдения широко применяют для исследования деформаций сооружений прямолинейной формы (ряда фундаментов или колонн зданий, плотин и т.п.) и определения смещений оползневых пород, то есть когда смещения достаточно знать по одному направлению. При этом координатную систему выбирают так, чтобы с направлением смещений совпадала ось ординат, а с направлением створа – ось абсцисс. Применяемые в практике высокоточных створных измерений программы можно разделить на простые (программы с необходимым числом измерений) и сложные (программы с избыточным числом независимых измерений). В простых программах нестворность каждой промежуточной точки измеряется относительно одного створа (общего или частного) в прямом и обратном направлениях. В сложных программах нестворности одних и тех же точек определяются независимо от нескольких частных створов в прямом или обратном ходе. Сложные программы, как правило, являются сочетанием нескольких простых программ. В практике инженерно-геодезических работ при строительстве ряда уникальных сооружений наибольшее распространение получили простые программы створных измерений, основными из которых являются программы общего створа; частей створа; последовательных створов; частных створов [3]. Простейшая из них – программа общего створа (рис.8.8,а), когда нестворности всех точек определяются относительно общего створа между концевыми (опорными) пунктами створа. Программа общего створа реализуется в двух вариантах: в створе двух крайних пунктов последовательно определяют нестворности всех промежуточных точек непосредственным (сквозным) визированием; в створе двух крайних пунктов определяют нестворности промежуточных пунктов, начиная с середины на себя; затем, меняя местами створный прибор и ориентируя визирную цель, также определяют нестворности точек, расположенных во второй части створа; для контроля средняя точка определяется дважды с обоих опорных пунктов створа. I I΄ II΄ II
Во втором варианте средняя точка определяется с такой же точностью, что и в первом. Нестворности остальных промежуточных точек получаются с более высокой точностью. Однако второй вариант имеет существенный недостаток. Из-за отсутствия обратного хода в нем не исключаются систематические погрешности (инструментальные, личные и т. п.). По программе частных (пересекающихся) створов (рис.8.8,б) прибор ориентируют относительно всего створа при определении первой промежуточной точки, а нестворности остальных измеряют от створов предыдущей и последующей точек створа: например, частную нестворность второй точки
где п — число определяемых пунктов створа; i — номер пункта, нестворность которого вычисляется; Приняв точность измеренных частных нестворностей
где k — номер частного створа. Из изложенного следует, что при одной и той же длине створа погрешность определения средней точки меньше, когда створ разделен на меньшее число частей. Преимущества программы равных частных створов заключаются в следующем: она позволяет выполнять измерения даже при неблагоприятных внешних условиях, когда просматривается лишь несколько точек створа; с большей точностью определяется взаимное положение смежных пунктов, что в ряде случаев является наиболее важным, например, при установке оборудования ускорителей; практически полностью исключаются погрешности за перефокусировку для средних значений нестворностей, полученных из прямого и обратного ходов. Программа последовательных створов (рис. 8.8, в). Частную нестворность
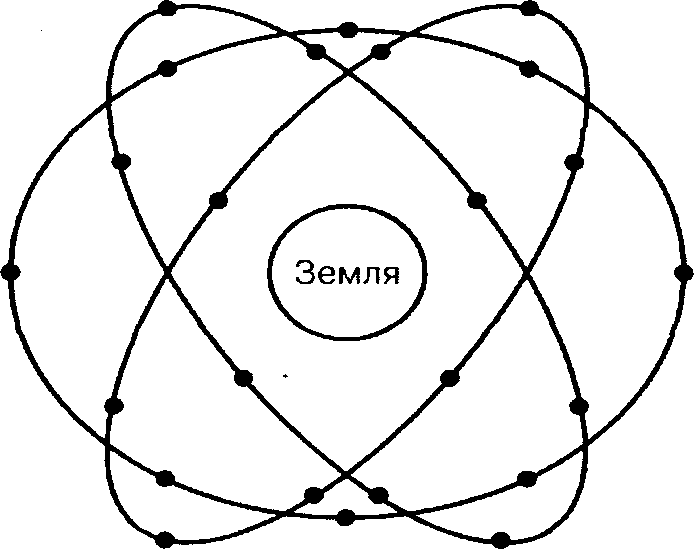
Для повышения точности определения нестворностей бi промежуточных точек по программе последовательных створов необходимо стремиться к уменьшению длины визирного луча независимо от расстояния между конечными пунктами створа. Практически длину визирного луча или шага перестановки прибора можно уменьшать до тех пор, пока суммарное влияние систематических погрешностей на точность створных измерений будет меньше влияния погрешностей визирования. Выбор оптимального шага перестановки инструмента зависит главным образом от заданной точности измерений, конкретной длины и конструкции створа, точности применяемых приборов. Расчеты показывают, что чем длиннее створ, тем эффективнее применять эту программу при сохранении одной и той же длины шага. Отсюда можно сделать важный практический вывод: чем больше длина створа, тем меньше относительная погрешность Программа последовательных створов по частям (рис. 8.8, г). В определенных условиях целесообразно применять программу измерений, выгодно сочетающую преимущества программ последовательных створов и равных частных створов. Пусть створ I—II разбит на три части с узловыми пунктами I’ и II' и промежуточными пунктами 1, 2,... 9. Сущность рассматриваемой программы заключается в следующем: 1) в створе I – II' определяется точка 1, затем в створе 1–II' определяется точка 2, в створе 2—II’ – точка 3; 2)затем в створе I'—II определяется точка 5, в створе 5—II — точка 6 и так далее все точки (7,..., 12), т. е. ориентирование зрительной трубы производится на 2/з общей длины створа; 3) дополнительно определяется нестворность точки I' относительно полного створа I – II. Приведение узловых точек I' и II' соответственно к створам I—II' и I'—II выполняется по формуле (8.11). Нестворности этих точек относительно общего створа I—II вычисляют по формуле (8.8). Анализ результатов измерений, выполненных по программе последовательных створов по частям, позволяет отметить следующее: чем меньше узловых точек I', II', тем ближе по точности эта программа к программе последовательных створов, и чем больше узловых точек, тем ближе к программе равных частных створов. Таким образом, приведенный анализ основных программ створных измерений методами оптического визирования позволяет сделать следующие основные выводы: наиболее точные результаты обеспечивает программа последовательных створов коротким визирным лучом; если створ разбит на части, то оптимальной является программа последовательных створов по частям, когда в створе минимальное число частей (три части), а все основные и промежуточные точки определяются по программе последовательных створов с ориентированием зрительной трубы на (2/з) L. Наблюдения створным методом отличаются удобством, простотой, производительностью и достаточной точностью результатов измерений. Этому методу присущи недостатки в том, что смещения определяются только в одном направлении (по оси X), перпендикулярном к створу АВ, а близкое, к наблюдаемым точкам расположение опорных пунктов не дает полной уверенности в их неподвижности, а значит, и надежности результатов измерений. Наиболее простыми способами измерения нестворностей являются способы подвижной марки, малых (параллактических) углов при неподвижной визирной и измерения угла на контрольном пункте. 2.3 СОСТАВ ГЛОБАЛЬНЫХ НАВИГАЦИОННЫХ СПУТНИКОВЫХ СИСТЕМ (ГНСС) 2.3.1 ГНСС ГЛОНАСС Космический сегмент. Полная (проектная) группировка НКА системы ГЛОНАСС состоит из 24-х спутников, равномерно распределенных в трех орбитальных плоскостях (рис. 3.1). Орбитальные плоскости разнесены относительно друг друга на 120° по абсолютной долготе восходящего узла и имеют условные номера 1, 2 и 3, возрастающие по направлению вращения Земли. В каждой орбитальной плоскости расположено по 8 спутников со сдвигом по аргументу широты 45°. Орбитальные плоскости сдвинуты друг относительно друга на 15°, т.е. спутники в соседних орбитальных плоскостях смещены на 15° по аргументу широты. Нумерация позиций спутников производится по порядку их последовательности на орбите в определенный момент времени и против их движения. Спутникам 1-й орбитальной плоскости присвоены номера 1...8, 2-й орбитальной плоскости - 9... 16, 3-й - 17...24. Орбиты спутников являются близкими к круговым, с высотой 18840... 19440 км (номинальное значение 19100 км). Наклонение орбиты - 64,8° с точностью ± 0,3°. Точность выведения спутника в заданную точку орбиты составляет 0,5 с по периоду обращения, ±1° по аргументу широты и ±0,01 по эксцентриситету. Орбитальная структура сети спутников построена таким образом, что в каждой точке земной поверхности и околоземного пространства одновременно наблюдаются не менее четырех спутников. Их взаимное расположение обеспечивает необходимые Точностные характеристики системы. Нужно заметить, что заданная точность координатно-временных измерений может быть достигнута при наличии в системе 21 спутника, по семь в каждой орбитальной плоскости, а остальные используются в качестве "горячего" резерва. Непрерывность навигационного поля системы ГЛОНАСС обеспечивается на высотах до 2000 км. Система сохраняет полную функциональность при одновременном выходе из строя до 6 НКА (по два в каждой плоскости).
Рис. 2.7. Орбитальная структура ГНСС ГЛОНАСС
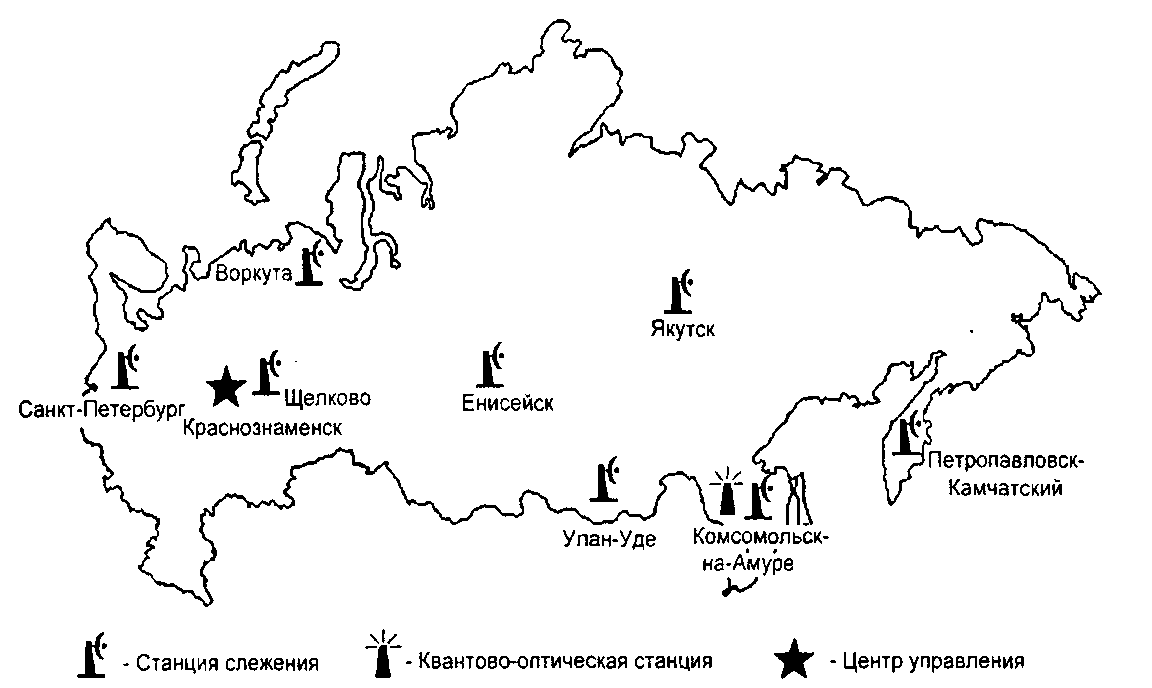
Интервал повторяемости трасс движения НКА и, соответственно, зон радиовидимости наземными потребителями составляет 17 витков или 7 сут 23 ч 27 мин 28 с. Отсюда видно, что СНС ГЛОНАСС не является резонансной (или синхронной), т.е. спутники в своем орбитальном движении не имеют резонанса (синхронизма) с вращением Земли. Начало каждого витка смещается относительно поверхности Земли приблизительно на 21° по долготе и орбита каждого НКА имеет многовитковый след. Благодаря этому возмущающее влияние нецентральности гравитационного поля Земли на орбиты НКА значительно снижается и является одинаковым для всех НКА. Как следствие, орбитальная группировка СНС ГЛОНАСС более стабильна по сравнению с GPS, имеющей синхронные 12-часовые орбиты. Орбитальная группировка ГЛОНАСС не требует дополнительных корректировок в течение всего срока активного существования НКА, хотя срок функционирования НКА на сегодняшний день несколько меньше, чем в GPS. Сегмент управления. Сегмент управления системы ГЛОНАСС состоит из следующих функциональных компонентов: - центра управления системой; - центрального синхронизатора; - контрольных станций; - системы контроля фаз; - кванто-оптических станций; - аппаратуры контроля поля. Все компоненты функционально связаны между собой. Наземный сегмент осуществляет: - траекторные измерения для уточнения и прогнозирования орбит спутников; - временные измерения для определения расхождения бортовых шкал времени относительно системной шкалы и синхронизацию бортовых шкал; - формирование и выгрузку на спутники массива служебной информации, включая эфемериды, альманах и временные поправки; - контроль за работой бортовых систем НКА на основе телеметрической информации; - контроль за содержанием навигационных сообщений НКА; слежение за характеристиками навигационного поля. Сеть станций слежения ГНСС ГЛОНАСС выгодно отличается от аналогичной сети GPS тем, что расположена только на территории своей страны. Отчасти этому способствует большая протяженность российской территории с востока на запад (рис. 2.8). Измерения траекторных параметров осуществляются запросным способом. По запросу со станции слежения спутник формирует ответ. По задержке ответа и доплеровскому сдвигу частоты определяются дальность до спутника с погрешностью не более 2...3 м и его радиальная скорость. Одновременно с измерением траекторных параметров происходит сбор телеметрической информации и выгрузка служебных данных. В настоящее время на территории России, кроме Центра управления, действует семь станций слежения. На данный момент существующая сеть станций считается достаточной, так как даже при выходе из строя одной из станций, она равноценно заменяется другой, благодаря избыточности системы. Кроме того, на станциях предусмотрено тройное резервирование аппаратуры.
Рис. 2.8. Расположение наземных станций слежения ГНСС ГЛОНАСС
Входящие в состав наземного комплекса кванто-оптические станции предназначены для периодического высокоточного измерения дальности до НКА при помощи лазерного дальномера. В настоящее время используется несколько типов кванто-оптических станций, в том числе расположенных за пределами России. Так, например, кванто-оптическая станция "Майданак" (Узбекистан) позволяет измерять дальность до объектов на высотах до 40 000 км. Дальномерная ошибка станции не превышает 1,5... 1,8 см, а угломерная от 0,5" до 2". Для эффективной работы кванто-оптических станций требуется наличие хорошей оптической видимости в ночное время, поэтому они, как правило, применяются не при систематическом наблюдении за НКА, а для юстировки радиодальномерных каналов. Кроме измерения траекторных и временных параметров НКА, наземные станции слежения обеспечивают контроль за качеством навигационного сервиса СНС. Поскольку координаты эталонных приемников точно определены, для каждого видимого НКА можно рассчитать прогнозируемые значения псевдодальностей и псевдоскоростей в заданные моменты времени. В режиме контроля НКА происходит сбор навигационных сообщений от всех видимых спутников (при завершенной системе их может быть от 8 до 11) и измерение псевдодальностей и псевдоскоростей. Затем, в автономном режиме, происходит обработка и проверка полученной информации. При обнаружении неисправности спутника сигнал об этом автоматически передается в Центр управления, где принимается решение об ограничении функциональности или выведении спутника из системы и о мерах по устранению неисправности. В режиме контроля навигационного поля происходит решение навигационной задачи по оптимальному созвездию над станцией слежения. Результат определения координат сравнивается с эталонным. При наличии сверхнормативных расхождений сообщение об ошибке и пакет принятой информации передаются в Центр управления для дальнейшего анализа и принятия решения. С неисправным спутником может быть проведен сеанс запроса телеметрии для поиска неисправности. После анализа ситуации на борт спутника может быть передана команда включения в навигационное сообщение признака неисправности этого НКА или пересчет и перезагрузка обновленного массива навигационных данных. Также для этого НКА могут быть проведены внеплановые сеансы контрольных измерений с использованием других станций слежения. Сегмент потребителей. В состав сегмента потребителей принято включать сообщество потребителей навигационной услуги, приемники навигационного сигнала, излучаемого спутниками, и подключаемое периферийное оборудование - антенны, устройства отображения информации, блоки автоматики и вспомогательное программное обеспечение. Потребитель может быть стационарным или подвижным, наземным (сухопутным или морским), воздушным или космическим. Присутствие человека в качестве оператора или прямого потребителя навигационной услуги не является обязательным. Но, в любом случае, конечными потребителями навигационной услуги являются люди. Поскольку по ряду причин более широкое распространение в мире получила система GPS, практически все приемники системы ГЛОНАСС принимают также сигналы GPS, но отнюдь не все приемники системы GPS принимают сигналы системы ГЛОНАСС. После приема и обработки навигационных сигналов аппаратура потребителя измеряет и вычисляет навигационные параметры: псевдодальность и псевдоскорость; вычисляет геоцентрические координаты, переводит их в геодезические координаты, вектор скорости и высоту над опорным эллипсоидом; находит поправку к местной шкале времени относительно системного времени.
|
 определяют от створа 1—3, третьей – от створа 2—4 и так далее. В этом случае можно использовать оптический метод визирования по программе равных частных створов. Для измерений по этой программе створ I—II разбивают на равные части и в створе I—2 определяют частную нестворность точки 1. Затем инструмент переносят в точку 1 и в створе 1—3 определяют частную нестворность,
определяют от створа 1—3, третьей – от створа 2—4 и так далее. В этом случае можно использовать оптический метод визирования по программе равных частных створов. Для измерений по этой программе створ I—II разбивают на равные части и в створе I—2 определяют частную нестворность точки 1. Затем инструмент переносят в точку 1 и в створе 1—3 определяют частную нестворность,  точки 2 и так далее до створа (п—1)—II. Величина нестворности
точки 2 и так далее до створа (п—1)—II. Величина нестворности  i -й промежуточной точки является функцией измеренных частных нестворностей
i -й промежуточной точки является функцией измеренных частных нестворностей  относительно каждого из частных створов, т. е.
относительно каждого из частных створов, т. е.  , и может быть получена из следующей системы уравнений:
, и может быть получена из следующей системы уравнений: ;
; 

 одинаковой, получим формулу для вычисления средней квадратической погрешности определения искомой нестворности
одинаковой, получим формулу для вычисления средней квадратической погрешности определения искомой нестворности , (8.9)
, (8.9) пункта 1 определяют относительно створа I—II, затем относительно частного створа 1 — II измеряют
пункта 1 определяют относительно створа I—II, затем относительно частного створа 1 — II измеряют  и так далее до последнего частного створа (п -1)— II, относительно которого определяют
и так далее до последнего частного створа (п -1)— II, относительно которого определяют  точки п. Затем аналогично измерения производят в обратном направлении.
точки п. Затем аналогично измерения производят в обратном направлении. . (8.16)
. (8.16) створных измерений при одной и той же длине шага.
створных измерений при одной и той же длине шага.