
И траншеиПри проектировании забоя экскаваторов, оборудованных драглайном или обратной лопатой, используют те же параметры экскаватора, что и при применении экскаватора с прямой лопатой. Однако несколько изменяются пределы лобовых и боковых забоев (рисунок 5). Наибольший радиус копания экскаватора зависит от глубины выемки (таблица 24). Конечный наименьший радиус копания на уровне стоянки экскаватора-драглайна принимают по таблице 25. Для пояснения значений параметров таблицы 25 на рисунке 12 приведена схема продольного разреза проходки. При разработке котлованов затраты времени на маневрирование экскаваторов в поперечном направлении (по отношению к общему направлению разработки котлована) велики, поэтому при разработке широких выемок первую проходку выполняют лобовой проходкой, а остальные – боковыми проходками. Схемы лобовых проходок при разработке котлована драглайном и обратной лопатой приведены на рисунке 5, а схема боковой проходки драглайна – на рисунке 17. Ширину боковой проходки драглайна принимают 0,7-0,8 наибольшего радиуса резания. Ширину боковой проходки экскаватора с обратной лопатой принимают равной 1,2-1,5 оптимального практического радиуса резания (Rоn) при погрузке грунта в транспортные средства и 0,5-0,8 Rоn – при отсыпке грунта в отвал. Таблица 24 – Относительные радиусы копания при угле откоса 63°
Таблица 25 – Конечный минимальный радиус копания на уровне стоянки экскаватора, оборудованного драглайном, м
Pиcунок 12 – Схема продольного разреза лобовой проходки экскаватора-драглайна
Н – глубина выемки; RТ.max - радиус копания технический максимальный на уровне стоянки экскаватора;
α1 – принятый угол рабочего откоса;
откоса; α – допустимый угол рабочего откоса; l – допустимое заложение рабочего откоса;
1-2-3-4 – наибольшее допустимое продольное сечение массива грунта, d – допустимое расстояние от крайней точки опоры экскаватора до
При разработке грунта драглайном с погрузкой в транспортные средства, находящиеся в одном уровне с экскаватором, угол поворота стрелы экскаватора рекомендуется принимать 70-180°. Определение основных параметров копания экскаватора-драглайна выполняют по схеме и зависимостям, приведенным на рисунке 12, а допустимое расстояние по горизонтали от подошвы рабочего откоса до ближайшей опоры экскаватора определяют по таблице 26, если отсутствуют соответствующие указания в проекте производства работ. Таблица 26 - Допустимое расстояние по горизонтали от подошвы откоса выемки до ближайшей опоры машины, м
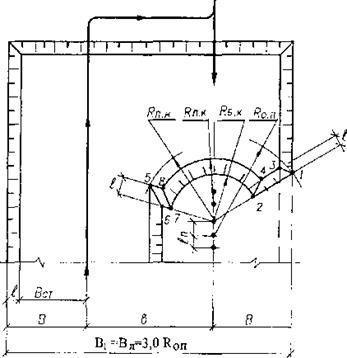
Схема лобовой проходки экскаватора-драглайна для разработки котлована с перемещением экскаватора по зигзагу показана на рисунке 15. Определение основных параметров копания экскаватора с обратной лопатой выполняют по схемам и зависимостям, приведенным на рисунке 13, а допустимое расстояние по горизонтали от подошвы рабочего откоса до ближайшей опоры экскаватора определяют по таблице 26, если отсутствуют соответствующие указания в проекте производства работ. На рисунке 13 показано наибольшее допустимое продольное сечение (1-2-3-4) массива грунта, разрабатываемого экскаватором с одной стоянки. Площадь этого сечения и, соответственно, объем массива грунта уменьшаются с увеличением глубины выемки.
Pиcунок 13 – Схема продольного разреза лобовой проходки
H – глубина выемки; RТ.max – радиус копания технический максимальный на уровне стоянки экскаватора; Ron – радиус копания оптимальный практический; Rn.н – радиус копания начальный на уровне подошвы откоса;
α – допустимый угол рабочего откоса; l – допустимое заложение рабочего откоса;
1-2-3-4 – наибольшее допустимое продольное сечение массива грунта, разрабатываемого с одной стоянки экскаватора; d – допустимое расстояние от крайней точки опоры экскаватора до бровки откоса; R0 – радиус установки экскаватора. При разработке обратной лопатой неглубоких выемок угол наклона рабочего откоса в пределах рабочей передвижки экскаватора может изменяться. Если глубина экскаваторного забоя приближается к наибольшей технологической глубине копания (таблица 11), то на завершающем этапе разработки массива песчаных или глинистых грунтов рабочий откос совмещается с откосом 3-4, а при разработке супесчаных или суглинистых грунтов конечное положение рабочего откоса устанавливается на таблице 26. Схема лобовой проходки экскаватора с обратной лопатой показана на рисунке 16. Последовательность построения схем лобовой проходки драглайна и обратной лопаты показаны на рисунке 14.
а)
1.
б)
1.
в)
1.
г)
1.
а – симметричная лобовая; б – две лобовые проходки; е – с продольным перемещением экскаватора по зигзагу; г – с поперечно-торцевым перемещением экскаватора
Рисунок 14 – Схемы лобовых проходок драглайна и экскаватора с обратной лопатой
Рисунок 15 – Схема лобовой проходки экскаватора-драглайна при разработке котлована с перемещением экскаватора по зигзагу
Рисунок 16 – Схема лобовой проходки экскаватора с обратной лопатой при разработке котлована с перемещением экскаватора по зигзагу При погрузке грунта обратной лопатой в лобовом, а также в боковом забоях машинист смещает ось рабочего перемещения экскаватора в сторону подхода транспортных средств. Автомобили устанавливают так, чтобы во время разгрузки ковша угол между осью стрелы экскаватора и продольной осью автомобиля был не более 40°, при этом угол поворота стрелы не должен превышать 70°. Разработка грунта траншеи выполняется в отвал (навымет), с погрузкой в транспортные средства или попеременно в отвал и на транспорт. Выбор марки экскаватора осуществляется по наибольшей глубине траншеи. Эту величину сравнивают с показателем наибольшей глубины копания экскаваторов, который приведен в технической характеристике экскаватора. С учетом работы при допустимом угле откоса для разрабатываемого грунта, необходимом по правилам техники безопасности и величины минимального радиуса копания на уровне стоянки экскаватора показатель наибольшей глубины копания будет меньше приведенного показателя (таблицы 11-13).
1 – ось вращения экскаватора; 2 – ось предыдущей проходки; 3 – ось землевозной дороги; Rн.min - начальный минимальный радиус резания на уровне стоянки экскаватора Рисунок 17 – Схема проходки экскаватором-драглайном при разработке котлована
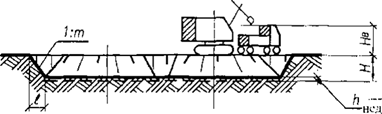
Объем работы по обратной засыпке определяют как разность объемов траншеи и инженерного сооружения, под которое разрабатывается траншея. При разработке грунта навымет грунт выгружают в односторонний или двусторонний отвал в зависимости от объема разрабатываемого грунта (рисунок 18).
Рисунок 18 – Схема к определению размеров поперечного сечения отвала и расположения отвала
Площадь сечения одностороннего отвала определяют по формуле
где F1 – разность площадей поперечных сечений траншеи и инженерного сооружения, м2; КПР – коэффициент первоначального разрыхления грунта (таблица 20). Высоту отвала определяют по формуле
где т 2 – коэффициент заложения естественного откоса (таблица 27). Если рассчитанная высота отвала больше наибольшей высоты выгрузки ковша экскаватора, то разработка грунта должна производиться с выгрузкой в двусторонний отвал. Если высота выгрузки ковша экскаватора соответствует высоте отвала, то проверяют выполнение условия техники безопасности о расположении подошвы отвала от бровки траншеи на расстояние не менее 0,5 м. При невыполнении этого требования выбирают новую схему разработки траншеи, на которой ось движения экскаватора смещена в сторону отвала. Величина смещения оси движения экскаватора ограничивается значением оптимального практического радиуса копания на уровень стоянки экскаватора и возможностью выполнения экскаваторщиком визуального контроля за устройством подошвы откосов траншеи. Если при наибольшем смещении оси движения экскаватора невозможно размещение грунта траншеи в один отвал, то принимают решение о выгрузке грунта в двусторонний отвал. В связи с тем, что при определенной глубине траншеи весь объем разрабатываемого грунта не размещается в двух отвалах, предусматривают дополнительное перемещение экскаватора, при котором выгрузка избыточного грунта выполняется за контур основного отвала, или перемещают избыточный грунт бульдозером в процессе устройства траншеи. Таблица 27 – Значения углов естественного откоса грунта
При больших объемах подземных инженерных сооружений разработка грунта траншеи выполняется попеременно в транспортные средства и в отвал. Грунт отвала предназначен для обратной засыпки траншеи, а объем этого грунта рассчитывается по формуле
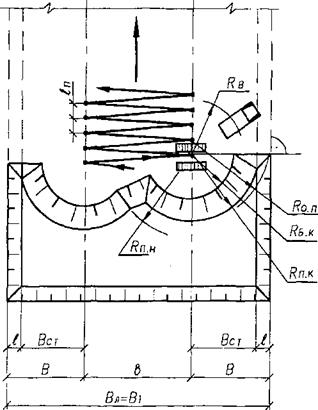
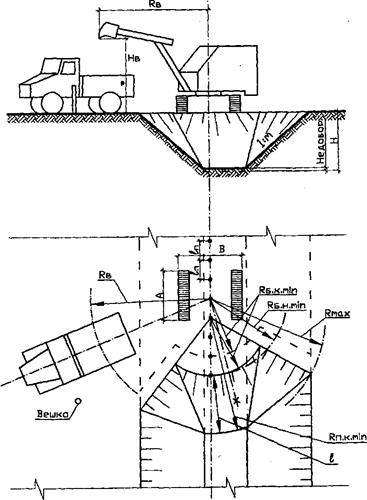
где Vо.з – объем работы при обратной засыпке; k1 – коэффициент относительного уплотнения грунта; rо.з – заданная проектом плотность грунта в сооружений; r – естественная плотность грунта. Разработка грунта траншеи драглайном осуществляется лобовыми проходками (рисунок 19).
Н – глубина траншеи, RК.min - конечный минимальный радиус копания на уровне стоянки экскаватора, RН.min – начальный минимальный радиус копания на уровне стоянки экскаватора, RП.К . – конечный радиус подошвы откоса; l'2 - принятое заложение торцевого откоса, RMAX – наибольший радиус копания на уровне стоянки экскаватора, RВ - конечный радиус выгрузки, lп – рабочая передвижка экскаватора Рисунок 19 – Схема лобового забоя экскаватора, оборудованного драглайном, при разработке грунта с погрузкой в автотранспорт При работе навымет угол поворота стрелы при возведении насыпных сооружений принимается не более 90°. Ковш экскаватора выводят из забоя немедленно после его заполнения. При этом во избежание высыпания грунта во время поворота экскаватора к месту выгрузки передняя (режущая) часть ковша должна быть несколько выше задней. Поворот стрелы экскаватора совмещают с подъемом ковша на высоту разгрузки, поворот от места разгрузки к забою – с опусканием ковша до уровня врезания его в грунт. Поворот платформы экскаватора прекращается, не достигнув точки разгрузки ковша, ковш доходит до этой точки по инерции. Конечный наименьший радиус копания на уровне стоянки экскаватора RК.min принимают по таблице 25. Начальный наименьший радиус копания на уровне стоянки экскаватора RН.min, определяемый величиной RК.min и рабочей передвижкой экскаватора lп, рассчитывается по формуле
Автомобили-самосвалы при погрузке грунта на уровне стоянки экскаватора ставят под таким углом к оси проходки экскаватора и на таком расстоянии от него, чтобы исключалась опасность задеть ковшом кабину самосвала. Движение автомобилей в пределах призмы обрушения грунта выемки (котлована, траншеи) без креплений запрещается. Допускается движение автомобилей в пределах призмы обрушения грунта у выемок с креплениями при условии предварительной проверки расчетом прочности креплений. Перемещение, установка и работа машин вблизи выемок (котлованов, траншей, канав и т. п.) с неукрепленными откосами разрешается только за пределами призмы обрушения грунта на расстоянии, установленном проектом производства работ или по таблице 26. Минимальное расстояние от оси движения машин до бровки откоса (рисунок 19) определяется из условия техники безопасности:
где В' – величина равная половине ширины колеи колес или хода гусениц с запасом 1... 1,5 м и принимаемая: для автотранспорта и железнодорожного пути узкой колеи – 2,5 м; для железнодорожного пути нормальной колеи – 4 м; для экскаваторов с вместимостью ковша 0,3; 0,5 и 1 м3 соответственно 3,2 и 3,5 м; Н – глубина котлована; m1 и m2 – соответственно коэффициенты заложения угла действительного и допустимого откосов выемки (таблица 1). Разработку грунта траншеи обратной лопатой осуществляют лобовой проходкой (рисунок 20).
R0 – расстояние от оси вращения платформы экскаватора до наиболее удаленной точки опоры нижней тележки; RБ.К..min – минимальный радиус копания на уровне стоянки экскаватора (бровки откоса); l1 – заложение предельно допустимого бокового и рабочего откосов; l2 – заложение откоса отвала грунта; RП.К..min – конечный радиус копания на уровне подошвы откоса; lп – рабочая передвижка экскаватора; RП.Н – начальный радиус копания на уровне подошвы откоса; RП.max – начальный максимальный радиус копания, RБ.max – радиус копания максимальный на уровне стоянки экскаватора (бровки откоса) Рисунок 20 – Схема разработки траншеи экскаватором с обратной лопатой При разработке обратной лопатой грунта навымет величина угла поворота стрелы экскаватора не должна превышать в среднем 90°. Конечный минимальный радиус копания на уровне стоянки экскаватора (RБ.К..min), определяемый величиной диагонали, соединяющей наиболее удаленную точку опоры нижней тележки с осью вращения экскаватора (R0), и допустимым расстоянием от опоры крайней точки экскаватора до верхней бровки откоса (таблица 26), рассчитывают по формуле
Величину
где А и В – соответственно длина и ширина тележки экскаватора (принимается по [8], таблицы 84, 90).
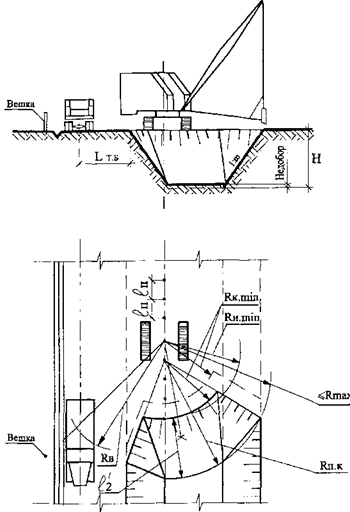
Н – глубина траншеи; НВ – высота выгрузки; RВ – радиус выгрузки; RБ.К..min - конечный минимальный радиус копания на уровне стоянки экскаватора; RБ.Н..min – начальный минимальный радиус копания; l1 - заложение торцевого откоса траншеи; Rmax – наибольший радиус копания на уровне стоянки; RП.К..min – конечный радиус подошвы откоса
Рисунок 21 – Схема лобового забоя экскаватора, оборудованного обратной лопатой, при разработке грунта с погрузкой в автотранспорт
Начальный минимальный радиус копания на уровне стоянки экскаватора (RБ.Н.min), определяемый величиной RБ.К..min и рабочей передвижки экскаватора (lп) рассчитывают по формуле
Значения начального и конечного радиусов копания на уровне подошвы откоса (рисунок 20)
Затем проверяется выполнение неравенства
Величина RП.max определяется по таблице 24. На основании рассчитанных параметров проходки вычерчивается масштабная схема разработки траншеи. При разработке грунта обратной лопатой с погрузкой в транспортные средства машинист смещает ось рабочего перемещения экскаватора в сторону прохода транспортных средств. Автомобили устанавливают так, чтобы во время разгрузки ковша угол между осью стрелы экскаватора и продольной осью автомобиля был не более 40°, при этом угол поворота стрелы не должен превышать 70° (рисунок 21).
|

 (ЕНиР)
(ЕНиР)
 m2 = (таблица 25)
m2 = (таблица 25)


 к = (таблица 24)
к = (таблица 24)

 (таблица 22)
(таблица 22)
 m = (таблица 1)
m = (таблица 1)


 радиус копания оптимальный практический;
радиус копания оптимальный практический; радиус копания начальный на уровне подошвы откоса;
радиус копания начальный на уровне подошвы откоса; рабочая передвижка;
рабочая передвижка; радиус копания конечный на уровне подошвы откоса;
радиус копания конечный на уровне подошвы откоса; принятое заложение рабочего откоса;
принятое заложение рабочего откоса; – радиус копания конечный на уровне бровки откоса;
– радиус копания конечный на уровне бровки откоса; – радиус копания конечный минимальный на уровне подошвы
– радиус копания конечный минимальный на уровне подошвы радиус копания конечный минимальный на уровне бровки
радиус копания конечный минимальный на уровне бровки радиус установки экскаватора.
радиус установки экскаватора.
 m = (таблица 1)
m = (таблица 1)


 рабочая передвижка;
рабочая передвижка; радиус копания конечный на уровне бровки откоса;
радиус копания конечный на уровне бровки откоса; 

 2.
2.  3.
3. 
 3.
3.  4.
4. 
 2.
2. 
 3.
3. 



 , (40)
, (40) , (41)
, (41) (42)
(42)
 , (43)
, (43) (44)
(44)

 (45)
(45) определяют по формуле
определяют по формуле (46)
(46)
 (47)
(47) (48)
(48) (49)
(49) (50)
(50)


