
РЫЧАЖНЫЕ МЕХАНИЗМЫФЕДЕРАЛЬНОЕ АГЕНТСТВО ПО ОБРАЗОВАНИЮ РФ ГОСУДАРСТВЕННОЕ ОБРАЗОВАТЕЛЬНОЕ УЧРЕЖДЕНИЕ ВЫСШЕГО ПРОФЕССИОНАЛЬНОГО ОБРАЗОВАНИЯ «ТЮМЕНСКИЙ ГОСУДАРСТВЕННЫЙ НЕФТЕГАЗОВЫЙ УНИВЕРСИТЕТ» ИНСТИТУТ ТРАНСПОРТА
Кафедра Детали машин
ОБЗОР ОСНОВНЫХ ВИДОВ МЕХАНИЗМОВ
МЕТОДИЧЕСКИЕ УКАЗАНИЯ
к практическим занятиям по Теории механизмов и машин для студентов специальностей НР-130503, ПСТ-130501, НБ-130504, МОП-130602, АТХ-190601, СТЭ-190603, ПДМ-190205, СП-150202, ПТИ-260703, ТМ-151001, МКC-151002, МХП-240801, МСО-190207 очной и заочной полной и сокращенной форм обучения
Тюмень 2009 Утверждено редакционно-издательским советом Тюменского государственного нефтегазового университета
Составители: доцент, к.т.н. Забанов Михаил Петрович профессор, д.т.н. Бабичев Дмитрий Тихонович ассистент, Панков Дмитрий Николаевич
© государственное образовательное учреждение высшего профессионального образования «Тюменский государственный нефтегазовый университет» 2007 г ЦЕЛЬ И СОДЕРЖАНИЕ РАБОТЫ
В процессе занятия необходимо ознакомиться с основными группами и видами механизмов, их графическими изображениями. Научиться представлять реальный механизм в виде схемы. В отчете необходимо изобразить и описать классические виды механизмов. Ведущей отраслью современной техники является машиностроение. Прогресс машиностроения определяется созданием новых высокопроизводительных и надежных машин. Решение этой важнейшей проблемы основывается на комплексном использовании результатов многих научных дисциплин и, в первую очередь, теории механизмов и машин. По мере развития машин содержание термина "машина" изменялось. Для современных машин дадим следующее определение: машина есть устройство, создаваемое человеком для преобразования энергии, материалов и информации с целью облегчения физического и умственного труда, увеличения его производительности и частичной или полной замены человека в его трудовых и физиологических функциях. По выполняемым машинами функциям их делят на следующие классы: 1) Энергетические машины 2) Транспортные машины 3) Технологические машины 4) Контрольно-управляющие машины 5) Логические машины 6) Кибернетические машины Определение термина "механизм" неоднократно менялось по мере того, как появлялись новые механизмы. Механизм есть система тел, предназначенная для преобразования движения одного или нескольких твердых тел в требуемые движения других тел. Если в преобразовании движения кроме твердых тел участвуют жидкие или газообразные тела, то механизм называется соответственно гидравлическим или пневматическим. С точки зрения функционального назначения механизмы делятся на следующие виды: 1) Механизмы двигателей и преобразователей 2) Передаточные механизмы 3) Исполнительные механизмы 4) Механизмы управления, контроля и регулирования 5) Механизмы подачи, транспортировки и сортировки обрабатываемых изделий и объектов 6) Механизмы автоматического счета, взвешивания и упаковки готовой продукции Основным признаком механизма является преобразование механического движения. Механизм входит в состав многих машин, т. к. для преобразования энергии, материалов и информации требуется обычно преобразование движения получаемого от двигателя. Нельзя отождествлять понятия "машина" и "механизм". Во-первых, кроме механизмов в машине всегда имеются дополнительные устройства, связанные с управлением механизмами. Во-вторых, есть машины, в которых нет механизмов. Например, в последние годы созданы технологические машины, в которых каждый исполнительный орган приводится в движение от индивидуального электро- или гидродвигателя. При описании механизмов, они были разделены на отдельные группы по признаку их конструктивного оформления (рычажные, кулачковые, фрикционные, зубчатые и др.) Механизмы образуются последовательным присоединениям звеньев к начальному механизму. ЗВЕНО – одна или несколько неподвижно соединенных друг с другом деталей, входящих в механизм и движущихся, как одно целое. ВХОДНОЕ ЗВЕНО – звено, которому сообщается движение, преобразуемое механизмом в требуемые движения других звеньев. Входное звено соединено с двигателем либо с выходным звеном другого механизма. ВЫХОДНОЕ ЗВЕНО – звено, совершающее движение, для выполнения которого предназначен механизм. Выходное звено соединено с исполнительным устройством (рабочим органом, указателем прибора), либо со входным звеном другого механизма. Звенья соединяются друг с другом подвижно посредством кинематических пар: вращательных (шарнир) и поступательных (ползун). ТРАЕКТОРИЯ движения точки (звена) – линия перемещения точки в плоскости. Это может быть прямая линия или кривая.
РЫЧАЖНЫЕ МЕХАНИЗМЫ Рычажными механизмами называют механизмы, в которые входят жесткие звенья, соединенные между собой вращательными и поступательными кинематическими парами. Простейшим рычажным механизмом является двухзвенный механизм, состоящий из неподвижного звена-стойки 2 (Рис.1.1) и подвижного рычага 1, имеющего возможность вращаться вокруг неподвижной оси (обычно это начальный механизм).
Рис.1.1 Двухзвенный рычажный механизм К двухзвенным рычажным механизмам относятся механизмы многих ротационных машин: электромоторов, лопастных турбин и вентиляторов. Механизмы всех этих машин состоят из стойки и вращающегося в неподвижных подшипниках звена (ротора). Более сложными рычажными механизмами являются механизмы, состоящие из четырех звеньев, так называемые четырехзвенные механизмы. На Рис.1.2 показан механизм шарнирного четырехзвенника, состоящего из трех подвижных звеньев 1, 2, 3 и одного неподвижного звена 4. Звено 1, соединенное со стойкой, может совершать полный оборот и носит название кривошипа. Такой шарнирный четырехзвенник, имеющий в своем составе один кривошип и одно коромысло называется кривошипно-коромысловым механизмом, где вращательное движение кривошипа посредством шатуна преобразуется в качательное движение коромысла. Если кривошип и шатун вытянуты в одну линию, то коромысло займет крайнее правое положение, а при наложении друг на друга – левое.
Рис. 1.2 Механизм шарнирного четырехзвенника
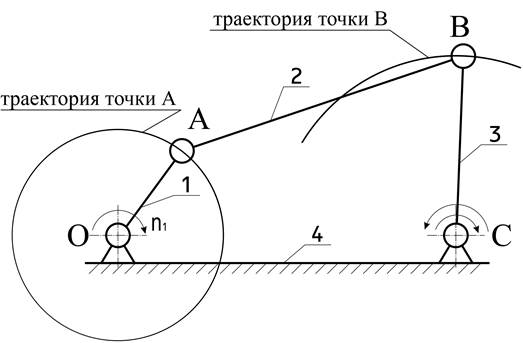
Примером такого механизма является механизм представленный на Рис.1.3, где звено 1 – кривошип (входное звено), звено 2 – шатун, звено 3 – коромысло. Точка MS двигаясь по кривой Рассматриваемый механизм, называемый симметричным механизмом Чебышева, часто применяют в качестве кругового направляющего механизма, у которого АВ = ВС = ВМ = 1. При указанных соотношениях
Рис. 1.3 Кривошипно-коромысловый механизм
точка М шатуна АВ описывает траекторию, симметричную относительно оси n - п. Угол наклона оси симметрии к линии центров СО определяется: ÐМСО = π – Ω / 2. Часть траектории точки М является дугой окружности радиуса О1М, что может быть использовано в механизмах с остановкой выходного звена. Другим примером четырехзвенника является широко распространенный в технике кривошипно-ползунный механизм (Рис. 1.4).
Рис. 1.4 Кривошипно-ползунный механизм
В этом механизме вместо коромысла устанавливается ползун, движущийся в неподвижной направляющей. Этот кривошипно-шатунный механизм применяют в поршневых двигателях, насосах, компрессорах и т.д. Если эксцентриситет е равен нулю, то получим центральный кривошипно-ползунный механизм или аксиальный. При е не равном нулю кривошипно-ползунный механизм называется нецентральным или дезаксиальным. Здесь вращение кривошипа ОА через шатун АВ преобразуется в возвратно-поступательное движение ползуна. Естественно крайние положения ползуна,будут при расположении кривошипа и шатуна в одну линию. Если в рассмотренном механизме заменить неподвижную направляющую на подвижную, которая называется кулисой, то получим четырехзвенный кулисный механизм с кулисным камнем. Примером такого механизма может служить кулисный механизм строгального станка (Рис.1.5). Кривошип 1, вращаясь вокруг оси, через кулисный камень 2 заставляет кулису 3 совершать качательное движение. При этом кулисный камень относительно кулисы движется возвратно-поступательно.
Рис. 1.5 Четырехзвенный кулисный механизм
Крайние положения кулисы будут при перпендикулярном расположении к ней кривошипа. Построить такие положения просто: изображается окружность радиусом равным длине кривошипа (траектория движения точки А), и проводятся касательные из оси вращения кулисы. Таким образом звенья могут совершать поступательное, вращательное или сложное движения.
|

 описывает траекторию
описывает траекторию  . Одни траектории могут быть воспроизведены рычажными механизмами теоретически точно, другие – приближенно, с достаточной для практики степенью точности.
. Одни траектории могут быть воспроизведены рычажными механизмами теоретически точно, другие – приближенно, с достаточной для практики степенью точности.





