И лёгкой промышленностиРоссийский заочный институт текстильной Кафедра электротехники и автоматизированных промышленных установок
Технологические измерения и приборы
Контрольная работа № 1 Анализ работы аналоговых и цифровых измерительных приборов
Работу выполнила Студентка 4 курса Факультета Э.М.Ф. Специальность 220301 Шифр С208030 Зенченкова Е. Д.
Преподаватель
_______ _ _ _ _
Серпухов 2011 Задание 1.1
Для измерительного механизма (ИМ) электромеханической группы, имеющего следующие параметры: Uн мВ (обм.) - 125 Iн мА (обм) - 5 αн дел. - 150 Измеряемые величины: Uи В - 30 Iи А - 1
- описать устройство, принцип действия и назначение всех его элемен-тов (с приведением соответствующей конструктивной схемы ИМ); - составить основные уравнения для электрической и механической частей, соответствующие его статическим и динамическим режимам работы и на их основе установить связь угла поворота подвижной части ИМ от электрического тока, протекающего по измерительной обмотке, или напряжения на её зажимах; - на основании полученных уравнений статики и динамики ИМ ка-чественно определить и построить статическую и переходную харак-теристики для его выходной и входной величин (считая коэффициент демпфирования, равном 0,7); - описать виды погрешностей, которые характерны для рассмат-риваемого ИМ; - описать какие электрические величины можно измерять с помощью рассматриваемого ИМ и какие при этом, без специальных конструктивных приёмов, будут получаться шкалы измерительного прибора; - описать: какие электрические величины можно измерять с помощью ИМ электромагнитной, электродинамической, ферромагнитной, индукцион-ной и электростатической систем измерения и какие при этом, без специаль-ных конструктивных приёмов, будут получаться шкалы измерительных приборов; - описать с помощью каких конструктивных приёмов можно неравно-мерную шкалу сделать в большей её части равномерной для измерительных приборов, перечисленных в предыдущем пункте задания; - рассчитать сопротивление шунта для обеспечения заданного предела измерения тока с помощью рассматриваемого ИМ и нарисовать схему его подключения к ИМ; - рассчитать добавочное сопротивление для обеспечения заданного предела измерения напряжения с помощью рассматриваемого ИМ и нарисовать схему его подключения к ИМ; - описать возможность использования измерительных трансформато-ров тока и напряжения для расширения пределов измерения тока и напряжения в соответствующих цепях измерительных приборов. Решение.
1. Конструкция прибора, в которой отклонение стрелки происходит под действием вращающего момент Ми , создаваемого благодаря взаимодействию между полем постоянного магнита с индукцией В и проводником длинною L активного элемента-рамки с измеряемым током Iи, и противодействующему моменту Мп двух спиральных пружинок, называется магнитоэлектрической системой. Спиральные пружинки являются и токоподводящими проводниками к рамке прибора измерительного тока Iи. На рис. 1 показано схема распространенной конструкции прибора магнитоэлектрической системы с дугообразным магнитом.
Рис. 1 Устройство прибора магнитоэлектрической системы. Основными частями измерительного механизма являются: постоянный магнит 1, к концам которого прикреплены полюсные железные наконечники 2 с цилиндрическими выточками, цилиндрический сердечник 4, образующий магнитный зазор между полюсами магнита в котором помещена на оси 5 подвижная катушка (рамка) 3. Сердечник 4 неподвижно закреплен на магнитопроводе. Под действием вращающего момента Ми начнет поворачиваться ось 5 и стрелка прибора начнет отклоняться вправо (рис.1). Вращающаяся ось начнет скручивать спиральные пружинки 10 (или растяжки - плоские пружины), при этом возникнет противодействующая упругая сила пружин Fп которая создаст на оси прибора противодействующий момент. Подвижная система прибора придет в равновесие, когда уравновесятся моменты на оси прибора. Стрелка отклонится на угол α и остановится. Так как момент Ми пропорционален силе измеряемого тока Iи, следовательно, и угол отклонения стрелки α тоже будет пропорционален силе измеряемого тока Iи.2. Составим уравнение для электрической части ИМ: сила, действующая на одну сторону рамки, будет равна: Fи1= Iи1ВL; -Fи2=-IиВL;где L = wℓ - общая длина отрезков проводников в активной стороне рам-ки, w-количество витков, ℓ- длина проводника равная длине активной сторо-не рамки, В – магнитный поток. где k - коэффициент, зависящий от жесткости пружин ИМ. Мп= Ми; Для угла на который отклонится стрелка можно записать: α =ƒ(Iи)= kξВIи2L; Рис.2 Перходная характеристика для входной и выходной величин ИМ1. Зависимость I(t) при скачкообразном изменении тока в рамке.2.Зависимость угла отклонения стрелки α(t) в момент скачкообразного изменения тока. Рис.2 Перходная характеристика для входной и выходной величин ИМ1. Зависимость I(t) при скачкообразном изменении тока в рамке.2.Зависимость угла отклонения стрелки α(t) в момент скачкообразного изменения тока.  Рис. 4 Статическая характеристика для входной и выходной величин. Рис. 4 Статическая характеристика для входной и выходной величин.4. При измерении величин приборами различных систем мы неизбежно сталкиваемся с понятиями погрешность и класс точности.
Абсолютная погрешность ΔА – разность между показанием прибора АИЗМ и действительным значением измеряемой величины АД: ΔА = АИЗМ – АД Эта погрешность представляет собой сумму погрешностей от влияния различных факторов: неправильной градуировки шкалы приборов, внешней температуры, саморазогрева, частоты переменного тока и т.д. Относительная погрешность γо – выраженное в процентах отношение абсолютной погрешности ΔА к значению измеряемой величины АИЗМ. Обычно точность измерения оценивается относительной погрешностью. γ0 = (ΔА ⁄Аизм )∙100% Приведенная погрешность γПР – выраженное в процентах отношение абсолютной погрешности ΔА к номинальному значению АНОМ, соответствующему наибольшему показанию прибора. γпр = (ΔА ⁄Аном )∙100% Допускаемая приведенная погрешность γПР.ДП электроизмерительного прибора определяет его класс точности. По значению допустимой приведенной погрешности все приборы делятся на 8 классов точности: 0,05; 0,1; 0,2; 0,5; 1,0; 1,5; 2,5; 4, это значение указывается на лицевой панели прибора в нижнем правом углу. Следует отметить, что оценивать по относительной погрешности точность показывающих приборов со стрелочным указателем неудобно. Дело в том, что абсолютная погрешность ΔА у них имеет обычно одно и тоже значение вдоль всей шкалы. При постоянной абсолютной погрешности ΔА с уменьшением измеряемой величины быстро растет относительная погрешность γо (Рис.5). Поэтому рекомендуется выбирать пределы измерения прибора так, чтобы снимать показания в пределах второй половины шкалы, ближе к ее концу.
ΔА, γо
ΔА
 
Рис.5. Абсолютная и относительная погрешности измерений.
5. Приборы магнитоэлектрической системы используются для измерения только в цепях постоянного тока. При этом шкалы этих приборов будут равномерными.
6. Измерительные приборы различных систем могут измерять следующие величины: Электромагнитные - ток и напряжение как постоянные так и переменные, шкала неравномерная. Электродинамические - угол сдвига фаз, частоту, электрическую емкость, индуктивность, мощность, напряжение и электрический переменный и пос-тоянный ток, шкала неравномерная (у ваттметра равномерная). Ферродинамические - тоже что и электродинамические только с добавлени-ем в одну из катушек ферромагнитного материала. Индукционная - электрическая энергия, скорость вращения диска прямопро-порциональна потребляемой энергии. Электростатические - величину эл. заряда, постоянное или переменное нап-ряжение, шкала неравномерная. 8. Рассчитаем сопротивление шунта для значений тока и напряжения данных в задании; Найдём сопротивление рамки ИМ: Rвн = Uн ⁄ Iн =0.125 ⁄ 0.005 =25 Ом Определим общее сопротивление шунта и ИМ: Rобщ = Uн ⁄ Iизм =0.125 ⁄ 1 =0.125 Ом Определим сопротивление шунта Rш для заданного тока полного отклонения; Rш = Rвн∙Rобщ ⁄ Rвн – Rобщ = 25∙0,125 ⁄ 25 – 0,125 = 3,125/24,875=0,125628 Ом
9. Рассчитаем величину добавочного сопротивления для обеспечения заданного предела измерения с помощью данного ИМ; Определим общее сопротивление Rобщ; Rобщ = Uизм ⁄ Iн = 30 ⁄ 0,005 = 6000 Ом
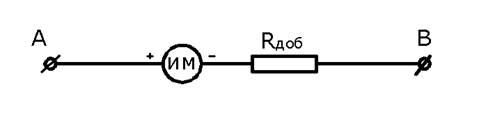
Определим величину добавочного сопротивления Rдоб ; Rдоб = Rобщ - Rвн = 6000 – 25 = 5975 Ом
Рис. 7 схема подключения добавочного сопротивления для изм. напряжения.
10. Для измерения больших токов совместно с ИМ используют трансформаторы тока. В этом случае максимально измеряемый ток увеличится в К раз, где К- коэффициент трансформации.
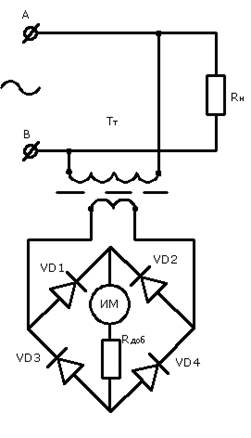
11. Для измерения высоких напряжений совместно с ИМ используют понижающие трансформаторы. В этом случае максимально измеряемое напряжение увеличится в К раз, где К- коэффициент трансформации.
Рис.8 схема включения ИМ совместно с понижающим трасформатором.
Задание 1.2 На основании исходных данных для вольтметра двойного интегрирования - количество разрядов прибора 3 - показания вольтметра, Ux, В 28.6 9,74 - номинальное напряжение вольтметра 50 10 - коэффициент скорости нарастания линейного напряжения k. В/с 12.5 (5,2) - частота ГИСЧ f 0 Мгц 1 2,6 - напряжение на выходе интегратора U0, В 0,624 - интервал времени интегрирования входного напряжения Ти. с 0,12
- составить структурную схему прибора и объяснить назначение его узлов; - составить временную диаграмму работы основных узлов прибора; - определить время измерения и число импульсов, прошедших на вход пересчётного устройства; - вычислить относительную и абсолютную погрешности измерения заданного значения измеряемой величины; -первые два пункта выполнить для частотометра.
Решение. Электронным вольтметром называется прибор, показания которого вызываются током электронных приборов, т. е. энергией источника питания вольтметра. Измеряемое напряжение управляет током электронных приборов, благодаря чему входное сопротивление электронных вольтметров достигает весьма больших значений и они допускают значительные перегрузки.
Рис. 9. Цифровой вольтметр с двойным интегрированием: а – структурная схема; б – временные диаграммы
Структурная схема вольтметра и временные диаграммы, поясняющие ее работу, представлены на рис. 9. Цикл измерения входного напряжения их состоит из двух отрезков времени: Т = Т1 + Т2. В начале цикла измерения при t=t0 управляющее устройство вырабатывает калиброванный импульс U'упр длительности Т1 = ТоК, где То — период следования счетных импульсов; К — емкость счетчика. В момент появления фронта управляющего импульса U'ynp ключ замыкается в положение 1, и с входного устройства на интегратор поступает напряжение U'x, пропорциональное измеряемому напряжению их. Интегрирование напряжения U'x продолжается в течение интервала Т1) (на выходе интегратора формируется нарастающее напряжение U и), по окончании которого при t = t\ управляющий сигнал U"упp переводит ключ в положение 2 и на интегратор с источника образцового напряжения подается образцовое отрицательное напряжение Uион. Одновременно с этим управляющий сигнал U"np опрокидывает триггер. Интегрирование напряжения U ион происходит быстрее, так как в схеме установлено 1U ион | > U'x- На выходе интегратора формируется спадающее напряжение Uи, причем длительность интервала интегрирования Т2 тем больше, чем выше амплитуда измеряемого напряжения U'x. В момент времени t = t 2 напряжение Uи на выходе интегратора становится равным нулю и сравнивающее устройство (второй его вход соединен с корпусом) выдает сигнал на триггер, возвращая его в исходное состояние. На его выходе формируется импульс UT длительностью T2, поступающий на вход схемы И. На другой ее вход подается сигнал Uгеи от генератора счетных импульсов. По окончании импульса, поступающего с триггера процесс измерения прекращается. На счетчике, а значит и на цифровом отсчетном устройстве, оказывается записанным число импульсов N (Uсч), пропорциональное уровню измеряемого напряжения их :
Это выражение приводит к следующим формулам:
Из последних формул получим:
Время tx поступления импульсов на вход ПУ определяется из условия:
Отсюда
где Таким образом, число импульсов, зафиксированных отсчетным устройством ОУ за время tx,
Получаем:
Как видно из приведенных соотношений, погрешность результата измерения зависит от одного уровня образцового напряжения. Основными источниками погрешностей вольтметров данного типа являются: 1. погрешность задания напряжения источником опорного напряжения; 2. нестабильность источника опорного напряжения; 3. погрешность задания калиброванной длительности импульса; 4. нестабильность опорной частоты; 5. погрешность дискретизации. Кроме них еще существуют погрешность порога срабатывания сравнивающего устройства и погрешность, обусловленная наличием напряжения на корпусе прибора. Суммарная относительная погрешность интегрирующих вольтметров может находиться в диапазоне от 0,005 до 0,02 % в зависимости от типа вольтметра. Достоинством прибора является хорошая помехозащищенность, так как прибор интегрирующий. На основе приборов с двойным интегрированием выпускаются приборы с более высоким классом точности, чем приборы с ГЛИН. Рассмотренный метод времяимпульсного преобразования с двойным интегрированием позволяет осуществить эффективную защиту от помех, измерять напряжения обеих полярностей, получать большое входное сопротивление прибора (не менее 10 МОМ), достаточно малую погрешность измерений (младшего разряда счета). Существуют вольтметры трехтактного интегрирования, для которых характерно более высокое быстродействие. Вычислим абсолютную и относительную погрешности; ΔА = Аизм – Ад = Ux-Uобр=9,74 – 10,0 = - 0,26 γ0 = (ΔА ⁄ Аизм)∙100% = (- 0,26 ⁄ 9,74)∙100% = 0,026∙100%= 2,6 %.
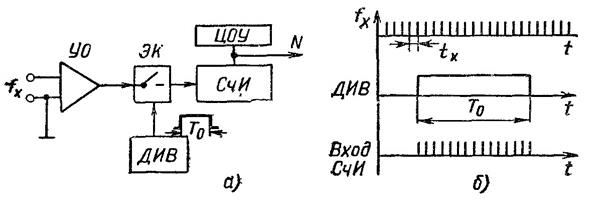
Частотомер предназначен для измерения частоты синусоидальных и частоты следования импульсных сигналов, измерения периода синусоидальных и периода следования импульсных сигналов, измерения длительности импульсов, измерения отношения частот электрических сигналов, выдачи сигнала опорной частоты. Цифровые частотомеры (ЦЧ) практически вытеснили все остальные виды частотомеров и занимают доминирующее положение в комплексе аппаратуры для частотно-временных измерений. Современные типы ЦЧ позволяют измерять fx, Тх, Δtx, отношение частот и нестабильность частоты. При комплектовании соответствующими преобразователями они превращаются в цифровые вольтметры и мультиметры. Большинство типов ЦЧ являются приборами прямого преобразования, осуществляющими счет числа идентичных событий за определенный интервал времени измерения. В зависимости от значения этого интервала (называемого иногда «временными воротами») можно выделить ЦЧ мгновенных значений, измеряющие fx за один период колебаний Тх (аналогичны неинтегрирующим ЦВ), и ЦЧ средних значений, измеряющие fx путем подсчета числа периодов Тх за интервал времени измерения Та~>Тх и деления полученного числа на Ти (аналогичны интегрирующим ЦВ). Несмотря на многофункциональность, современные ЦЧ могут быть охарактеризованы некоторой типовой структурной схемой и определенной номенклатурой параметров, позволяющей оценить их возможности как радиоизмерительных приборов. Структурная схема цифрового частотомера показана на рис. 10, а. Напряжение измеряемой частоты fx произвольной формы подается на вход усилителя-ограничителя УО, в котором оно преобразуется в прямоугольные импульсы напряжения той же частоты fx и подается на электронный ключ ЭК.
Рис. 10. Цифровой частотомер: а – структурная схема; б – временные диаграммы Ключ ЭК в нормальном состоянии разомкнут, но при подаче импульса напряжения дли-тельностью Т0 от датчика интервала времени ДИВ ключ ЭК замыкается и импульсы с выхода УО поступают на вход счетчика импульсов СчИ, в котором они подсчиты-ваются. По окончании импульса Т0 ключ ЭК размыка-ется, на выходных шинах СчИ формируется код N, соот-ветствующий количеству импульсов напряжения, прошед-ших на счетчик СчИ. Этот код подается на цифровое от-счетное устройство ЦОУ, где отображается в виде цифр, а также поступает на выход частотомера для передачи во внешние устройства. На рис. 10, б показана временная диаграмма импульсов, действующих в схеме: на выходе УО (fx), на выходе ДИВ (Т0) и на входе СчИ. Обозначим через tx период импульсов частоты fXy тогда количество импульсов N, прошедших на счетчик СчИ за время Т0, будет равно: N = T0 /tx = TQ fx. При постоянном и стабильном значении Т0 код N прямо пропорционален fx. Точность измерения частоты fx зависит от точности задания интервала То. Современные цифровые частотомеры в качестве датчика интервала времени содержат высокочастотный генератор, снабженный делителем частоты, на выходе которого и получают импульсы с периодом Т0. Стабильность частоты кварцевых генераторов очень высока — изменение частоты после ее подстройки не превышает 10-5 % за 10 дней, поэтому цифровые частотомеры позволяют измерять частоту и связанные с ней величины с очень высокой точностью, а отсчетные устройства частотомеров содержат до семи декад. Однако изменение частоты кварцевого генератора — не единственный источник погрешности цифрового частотомера. Другой составляющей погрешности является дискретность преобразования интервала времени Т0 в код N.
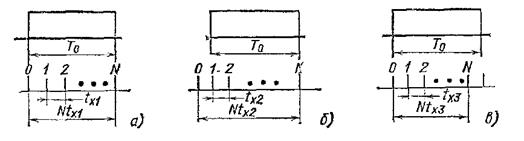
Рис. 9.17. Схема проявления погрешности дискретности при изме рении частоты. а — погрешность дискретности отсутствует; б —погрешность дискретности равна + t х ;
|



 γо
γо








 или
или 
 с
с - среднее за время tи значение входного напряжения.
- среднее за время tи значение входного напряжения. , но
, но  , откуда
, откуда