Тема № 14. Датчики перемещенияПри автоматизации технологических процессов и строительных машин приходится использовать сигналы, связанные с перемещением машин и их узлов, конструкций а также с деформациями сооружений. Диапазон измеряемых перемещений может быть весьма различным - от микрометров до метров, что определяет требования к типу и конструкции измерительного преобразователя. Преобразователь перемещения– измерительный преобразователь линейных или угловых перемещений в электрический, пневматический или механический сигнал. Преобразователи перемещения могут входить в состав датчиков для измерения других физических величин, о чем буде сказано в дальнейшем. Наиболее распространены контактные, реостатные, индуктивные, взаимоиндуктивные и емкостные преобразователи. Контактные преобразователи - наиболее простые преобразователи перемещения. Они могут быть одно- или многопредельными, т. е. иметь одну или несколько пар замыкающих или размыкающих контактов (рис. 1).
Рис. 1. Один из контактов пары неподвижен, а другой связан с перемещением объекта, о котором необходимо получить информацию. Следовательно, перемещение может преобразовываться в замыкание или размыкание электрической цепи. Режим работы контактов в таких устройствах должен обеспечивать их стабильность. Не допускается образование между контактами дуги или искры, ведущих к их разрушению. Поэтому мощность устройств, включаемых контактными преобразователями, не должна быть больше 150 мВт. Рабочий диапазон таких преобразователей - от микрометра до десятков метров. Реостатный преобразователь перемещенияпредставляет собой переменный резистор, движок которого может совершать линейное или угловое перемещение. Если связать с движком перемещение узла устройства или машины, то получим зависимость сопротивления преобразователя от перемещения, которая может быть линейной или нелинейной - в зависимости от конструкции преобразователя.
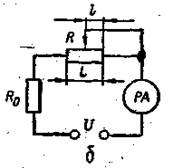
Рис. 2. Сопротивление – это величина, характеризующая противодействие электрической цепи (или ее участка) электрическому току. Реостатный преобразователь состоит (рис. 2 а) из жесткого изоляционного каркаса, на который намотана калиброванная проволока из сплава высокого сопротивления, например константана. По каркасу с проволокой скользит движок. Формы каркаса и характер намотки зависят от требуемого закона изменения сопротивления вследствие перемещения движка. Функциональная зависимость, тока цепи с реостатным преобразователем от перемещения движка зависит также от схемы включения. Так, для схемы, показанной на рис. 2 б, зависимость тока цепи от перемещения нелинейная и определяется выражением
где I – ток в цени; U - напряжение питания схемы Rо - сопротивление добавочного резистора; R - полное сопротивление преобразователя; А1 - перемещение движка; L - полная длина перемещения движка. Реостатные преобразователимогут быть использованы в диапазоне перемещений от 5 до 150 мм. Тензопреобразователи (тензодатчики) предназначены для измерения малых перемещений. Они основаны на зависимости активного сопротивления проводника или полупроводника от его механической деформации. Эта зависимость характеризуется коэффициентом относительной тензочувительности
где Коэффициент относительной тензочувствительности может быть представлен также выражением
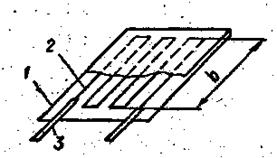
где μ; - коэффициент Пуассона, характеризующий связь продольной и поперечной деформаций (для металлов μ; = 0,24...0,4). В настоящее время применяются проволочные, пленочные и фольговые тензодатчики. Проволочный тензодатчик (рис. 3.) состоит из бумажной подложки 1, на которую наклеивается петлеобразно уложенная тонкая проволока 2 диаметром 0,2...0,5 мм. К концам проволоки припаяны медные выводы 3. Сверху наклеивается другой слой бумаги. Такой тензодатчик наклеивается на испытуемую деталь или конструкцию и воспринимает деформацию его поверхностного слоя - входную величину преобразователя. Выходной величиной является сопротивление датчика.
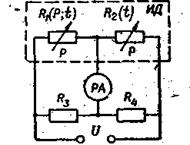
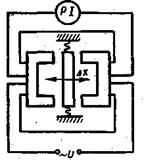
Рис. 3. Длина одной петли проволоки называется базой тензодатчикаи равна от 2 до 200 мм и более. Сопротивление тензодатчика от 30 до 500 Ом. Тензодатчики приборы массового применения, поэтому они изготавливаются серийно. В качестве измерительной цепи используется мостовая схема постоянного или переменного тока. Хотя температурный коэффициент сопротивления тензодатчика очень мал, приходится применять меры для компенсации температурной погрешности. Для этого в плечо моста (рис. 4), смежное с тензодатчиком Ri, включается такой же ненагруженный тензодатчик R2. Эти два элемента образуют полумост, который располагается на исследуемой детали ИД. В качестве измерительной цепи используется мостовая схема постоянного или переменного тока. Хотя температурный коэффициент сопротивления тензодатчика очень мал, приходится применять меры для компенсации температурной погрешности. Для этого в плечо моста (рис. 4), смежное с тензодатчиком R1, включается такой же ненагруженный тензодатчик R2. Эти два элемента образуют полумост, который располагается на исследуемой детали ИД.
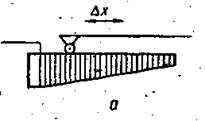
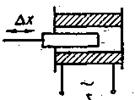
Рис. 4. Наша промышленность выпускает тензометрические установки - тензостанции, обеспечивающие измерение и регистрацию по нескольким каналам. Индуктивный преобразователь перемещения представляет собой соленоид с ферромагнетиком. Конструкции таких преобразователей могут быть различны. В одном случае соленоид жестко связан с неподвижной частью магнитопровода, другая часть которого подвижна (рис. 5, а). В другом случае ферромагнетик перемещается внутри соленоида (рис. 5, б ). В обоих случаях индуктивность соленоида зависит от перемещения ферромагнетика. Общее сопротивление соленоида определяется выражением
где r - активное сопротивление обмотки; ωL ( Δ x) - индуктивное сопротивление обмотки, являющееся функцией перемещения Δ х.
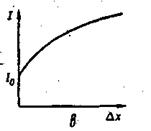
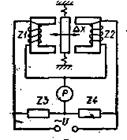
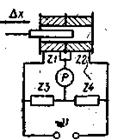
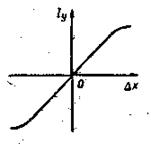
а б в Рис. 5. Зависимость тока в цепи соленоида от перемещения показана на рис 5, в. Серьезным недостатком индуктивных преобразователей являются нелинейная зависимость тока цепи от перемещения и возникновение значительных ферродинамических усилий между неподвижным и подвижным элементами прибора. Эти недостатки устраняются в преобразователях, построенных по дифференциальной схеме (рис. 6, а, б). Зависимость тока указателя от перемещения для дифференциального преобразователя показана на рис. 6, в.
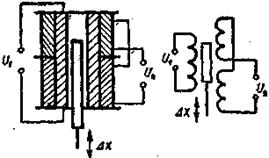
Рис. 6. Изменение знака тока при изменении знака Δ х, показанное на графике, означает перемену его фазы на обратную. Взаимоиндуктивные (трансформаторные) преобразователи перемещений от индуктивных отличаются наличием двух обмоток на магнитной системе, позволяющих получить индуктивную связь между источником питания и указателем или выходом схемы, что удобно во многих случаях. На рис. 7 показано несколько конструктивных схем таких датчиков.
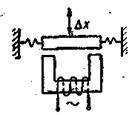
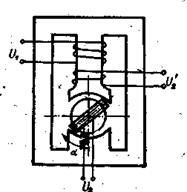
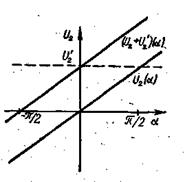
Рис. 7. Так, на рис. 7, а и б представлены дифференциально-трансформаторные датчики, а на рис 7, в — ферродинамический датчик угла поворота. Ферродинамический датчик состоит из шихтованного магнитопровода с кольцевым воздушным зазором, в котором вращается рамка. На магнитопроводе находятся две обмотки, к одной из которых подводится питание U1. ЭДС U2, наводимая в рамке, зависит от угла ее поворота. Вторая обмотка, расположенная на магнитопроводе, может соединяться последовательно с рамкой, чему соответствует прямая {U2+U2٭)a, что позволяет расширить предел измеряемого угла поворота. Зависимость выходного напряжения от угла α показана на рис. 7, г. При изменении знака угла поворота напряжение U2 изменяет фазу на обратную. Емкостный преобразователь перемещения - это конденсатор с подвижными пластинами или с подвижным диэлектриком. Конденсатор может быть плоским или цилиндрическим. Емкость плоского конденсатора изменяется при перемещении одной из обкладок (рис. 8) и определяется выражением C = εs/δ; где ε; - диэлектрическая проницаемость диэлектрика; s - площадь поверхности обкладок конденсатора, находящихся во взаимодействии; δ; - расстояние между обкладками.
Рис. 8.
Емкостные преобразователи обычно питаются напряжением повышенной частоты и включаются в одно из плеч мостовой схемы или по дифференциальной схеме.
|


 - относительное изменение сопротивления тензопреобразователя;
- относительное изменение сопротивления тензопреобразователя;  - относительное изменение длины проводящего материала.
- относительное изменение длины проводящего материала.
 а
а
 б
б
 в
в
 а
а
 б
б
 в
в
 г
г