
Кинематика рядовых механизмовЗубчатый механизм, у которого все звенья вращаются вокруг неподвижных осей, называют рядовым. Такой механизм может быть одноступенчатым (рис. 3.1 и 3.2) и многоступенчатым (рис. 3.3 В многоступенчатом рядовом механизме число ступеней совпадает с числом зацеплений, его общее передаточное отношение определяют как произведение передаточных отношений всех последовательно соединенных ступеней.
Так, для трехступенчатого механизма по рис. 3.3 общее передаточное отношение
На рис. 3.4 также представлен трехступенчатый механизм, у которого колеса
Отметим, что при 3.2. Кинематика планетарных и дифференциальных Планетарные и дифференциальные механизмы включают в себя колеса, оси которых являются подвижными. Рычаг, на котором расположены эти оси, называют водилом, а колеса с подвижными осями – сателлитами. Неподвижная ось вращения водила является центральной осью механизма. Колеса, которые вращаются или могут вращаться относительно центральной оси и при этом зацепляются с сателлитами, называют центральными или солнечными. В планетарную ступень входят: водило; сателлиты, размещенные на этом водиле; колеса, которые зацепляются с этими сателлитами.
На рис. 3.5 представлен простейший планетарный механизм, состоящий из водила H, центрального колеса Колесо Сателлит У этого механизма две степени свободы
поэтому его называют дифференциальным механизмом, или дифференциалом. Кинематику такого механизма можно описать формулой
здесь Из (3.4) видно, что для кинематической определимости этого механизма из трех угловых скоростей две должны быть заданы, т.е. механизм действительно является дифференциалом. Общий вид формулы (3.4), пригодный для описания кинематики практически любого планетарного механизма, имеет вид
ее называют формулой Р. Виллиса. Здесь a и b – любые два колеса одной и той же планетарной ступени, Величины угловых скоростей
Формула (3.5) более универсальна и пригодна для любого планетарного механизма, тогда как (3.6) можно применять только для таких планетарных ступеней, у которых имеются неподвижные колеса
На рис. 3.6 показана схема редуктора Джемса с двухвенцовым сателлитом. Для него
передаточное отношение обращенной ступени
сопоставляя (3.7) и (3.8), найдем передаточное отношение редуктора
Таким же способом найдем передаточное отношение редуктора Джемса с одновенцовым сателлитом (рис. 3.7):
Для редуктора Давида (рис. 3.8), также имеющего неподвижное колесо в составе ступени, входным звеном является водило H, что отличает эту схему от двух других при выводе формулы для
В этих примерах показано применение формулы Виллиса в виде (3.6), хотя было бы вполне корректным и допустимым использование ее в виде (3.5). Все схемы по рис. 3.6 – 3.8 имеют в своем составе три центральных звена – два центральных колеса и водило; каждое из этих звеньев нагружено вращающим моментом либо от источника движения, либо от потребителя мощности (ведомого звена), либо моментом от стойки. Такие звенья называют основными и в соответствии с их видом и количеством (в данном случае – два колеса и водило) подобным схемам присвоено обозначение типа 2 KH.
На рис. 3.9 приведена схема планетарного механизма, содержащего четыре центральных звена: три колеса – Найдем передаточное отношение
Обращенный механизм для данной схемы представляет собой разветвляющуюся рядовую кинематическую цепь, каждой из двух ее ветвей соответствует свое передаточное отношение:
После очевидных подстановок получаем
|
 определится по формуле
определится по формуле .
. образуют соосную кинематическую цепь, причем колесо
образуют соосную кинематическую цепь, причем колесо  участвует одновременно в двух зацеплениях – в одном как ведомое, в другом как ведущее (такие колеса называют связанными); для этого механизма
участвует одновременно в двух зацеплениях – в одном как ведомое, в другом как ведущее (такие колеса называют связанными); для этого механизма .
. (выходной вал B вращается медленнее входного вала A) механизм называют редуктором, а при
(выходной вал B вращается медленнее входного вала A) механизм называют редуктором, а при – мультипликатором.
– мультипликатором.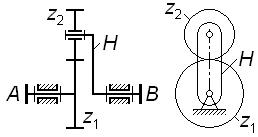
 и сателлита
и сателлита  ,
, ; (3.4)
; (3.4) – абсолютные угловые скорости соответствующих звеньев (величины алгебраические – положительные или отрицательные),
– абсолютные угловые скорости соответствующих звеньев (величины алгебраические – положительные или отрицательные),  – передаточное отношение обращенного механизма (т.е. такого воображаемого рядового механизма, который получают из заданного планетарного мысленной остановкой водила).
– передаточное отношение обращенного механизма (т.е. такого воображаемого рядового механизма, который получают из заданного планетарного мысленной остановкой водила). ; (3.5)
; (3.5) – передаточное отношение от a к b в обращенном (рядовом) механизме, это отношение всегда выражается через числа зубьев колес.
– передаточное отношение от a к b в обращенном (рядовом) механизме, это отношение всегда выражается через числа зубьев колес. и
и  могут быть любыми; в частности, при
могут быть любыми; в частности, при  (т.е. колесо b неподвижно) отношение
(т.е. колесо b неподвижно) отношение  , и тогда формула Р. Виллиса приобретает вид
, и тогда формула Р. Виллиса приобретает вид . (3. 6)
. (3. 6)
 , (3. 7)
, (3. 7) ; (3. 8)
; (3. 8) . (3. 9)
. (3. 9) , (3.10)
, (3.10) ; (3.11)
; (3.11) . (3. 12)
. (3. 12) :
: ; (3.13)
; (3.13) ; (3. 14)
; (3. 14) . (3. 15)
. (3. 15)
 ,
,  и водило H. Однако водило в этой схеме не является основным звеном, так как оно не может быть нагружено никаким внешним вращающим моментом, поэтому данный механизм отнесен к типу 3 K (т.е. символ H в обозначение типа механизма не входит).
и водило H. Однако водило в этой схеме не является основным звеном, так как оно не может быть нагружено никаким внешним вращающим моментом, поэтому данный механизм отнесен к типу 3 K (т.е. символ H в обозначение типа механизма не входит). . (3.16)
. (3.16) ;
;  . (3.17)
. (3.17) . (3.18)
. (3.18)


