Корректор высоты
Корректоры высоты типа КВ-11 (рис. 11) или КВ-16 предназначены для измерения и формирования электрического сигнала, пропорционального отклонению текущей высоты самолета от заданной высоты (например, высоты эшелона) ΔН = Н - Нзад. Этот сигнал выдается в автопилот для автоматической стабилизации самолета на заданной высоте.
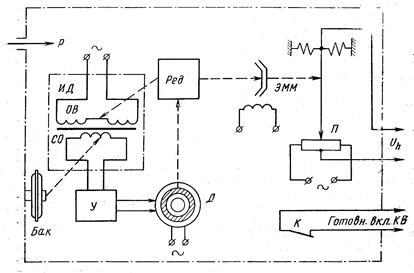
Рис. 11 – Схема корректора высоты КВ-11
Работа корректора высоты во многом аналогична работе электромеханического высотомера. Деформация анероидной коробки преобразуется индукционным датчиком в напряжение, которое после усилителя поступает на двигатель. При достижении заданной высоты пилот включает режим стабилизации высоты и тем самым замыкает цепь питания электромагнитной муфты ЭММ (рис. 11). В этот момент на выходе потенциометра П напряжение равно нулю, так как его скользящий контакт удерживался пружинами в среднем положении. После срабатывания электромагнитной муфты изменение высоты полета самолета приводит к появлению напряжения на индукционном датчике, вращению двигателя и передаче этого вращения через электромагнитную муфту на перемещение скользящего контакта потенциометра. Смещение скользящего контакта формирует выходное напряжение пропорционально отклонению самолета от заданной высоты.
|