Автоматизация и автоматизированные системы управления технологическим процессом (АСУ ТП)Общая задача управления технологическим процессом формулируется обычно как задача максимизации (минимизации) некоторого критерия (себестоимости, энергозатрат, прибыли) при выполнении ограничений на технологические параметры, накладываемых регламентом. Решение такой задачи для всего процесса в целом очень трудоёмко, а иногда практически невозможно ввиду большого числа факторов, влияющих на ход процесса. Поэтому весь процесс разбивают на отдельные участки, которые характеризуются сравнительно небольшим числом переменных. Обычно эти участки совпадают с законченными технологическими стадиями, для которых могут быть сформулированы свои подзадачи управления, подчинённые общей задаче управления процессом в целом. Задачи управления отдельными стадиями обычно направлены на оптимизацию (в частном случае, стабилизацию) технологического параметра или критерия, легко вычисляемого по измеренным режимным параметрам (производительность, концентрация продукта, степень превращения, расход энергии). Оптимизацию критерия проводят в рамках ограничений, задаваемых технологическим регламентом. На основании задачи оптимального управления отдельными стадиями процесса формулируют задачи автоматического регулирования технологических параметров для отдельных аппаратов. Важным этапом в разработке системы автоматизации является анализ основных аппаратов как объектов регулирования, т.е. выявление всех существенных входных и выходных переменных и анализ статических и динамических характеристик каналов возмущения и регулирования. Исходными данными при этом служат математическая модель процесса и (как первое приближение) статическая модель в виде уравнений материального и теплового балансов. На основе этих уравнений с учётом реальных условий работы аппарата все существенные факторы, влияющие на процесс, разбиваются на следующие группы. Возмущения, допускающие стабилизацию. К ним относят независимые технологические параметры, которые могут испытывать существенные колебания, однако по условиям работы могут быть стабилизированы с помощью автоматической системы регулирования. К таким параметрам обычно относятся некоторые показатели входных потоков. Так, расход питания можно стабилизировать, если перед аппаратом имеется буферная ёмкость, сглаживающая колебания расхода на выходе из предыдущего аппарата; стабилизация температуры питания возможна, если перед аппаратом установлен теплообменник, и т.п. Очевидно, при проектировании системы управления целесообразно предусмотреть автоматическую стабилизацию таких возмущений. Это позволит повысить качество управления процессом в целом. В простейших случаях на основе таких систем автоматической стабилизации возмущений строят разомкнутую (относительно основного показателя процесса) систему автоматизации, обеспечивающую устойчивое ведение процесса в рамках технологического регламента. Контролируемые возмущения. К ним условно относят те возмущения, которые можно измерить, но невозможно или недопустимо стабилизировать (расход питания, подаваемого непосредственно из предыдущего аппарата; температура окружающей среды и т.п.). Наличие существенных нестабилизируемых возмущений требует применения либо замкнутых по основному показателю процесса систем регулирования, либо комбинированных АСР, в которых качество регулирования повышается введением динамической компенсации возмущения. Неконтролируемые возмущения. К ним относятся те возмущения, которые невозможно или нецелесообразно измерять непосредственно. Первые – это падение активности катализатора, изменение коэффициентов тепло- и массопередачи и т.п. Примером вторых может служить давление греющего пара в заводской сети, которое колеблется случайным образом и является источником возмущения в тепловых процессах. Выявление возможных неконтролируемых возмущений – важный этап в исследовании процесса и разработке системы управления. Наличие таких возмущений требует, как и в предыдущем случае, обязательного применения замкнутых по основному показателю процесса систем автоматизации. Возможные регулирующие воздействия. Это материальные или тепловые потоки, которые можно изменять автоматически для поддержания регулируемых параметров. Выходные переменные. Из их числа выбирают регулируемые координаты. При построении замкнутых систем регулирования в качестве регулируемых координат выбирают технологические параметры, изменение которых свидетельствует о нарушении материального или теплового баланса в аппарате. К ним относятся: уровень жидкости – показатель баланса по жидкой фазе; давление – показатель баланса по газовой фазе; температура – показатель теплового баланса в аппарате; концентрация – показатель материального баланса по компоненту. Анализ возможных регулирующих воздействий и выходных координат объекта позволяет выбрать каналы регулирования для проектируемых АСР. При этом в одних случаях решение определяется однозначно, а в других имеется возможность выбора как регулируемой координаты, так и регулирующего воздействия для заданного выхода. Окончательный выбор каналов регулирования проводят на основе сравнительного анализа статических и динамических характеристик различных каналов. При этом учитывают такие показатели, как коэффициент усиления, время чистого запаздывания, его отношение к наибольшей постоянной времени канала τ/Т. На основе анализа технологического процесса как объекта регулирования проектируют систему автоматизации, обеспечивающую решение поставленной задачи регулирования. Начинают с проектирования одноконтурных АСР отдельных параметров: они наиболее просты в наладке и надёжны в работе, поэтому широко используются при автоматизации технологических объектов. Однако при неблагоприятных динамических характеристиках каналов регулирования (большом чистом запаздывании, большом отношении τ/Т) даже в случае оптимальных настроек регуляторов качество переходных процессов в одноконтурных АСР может оказаться неудовлетворительным. Для таких объектов анализируют возможность построения многоконтурных АСР, в которых качество регулирования можно повысить, усложняя схемы автоматизации, т.е. применяя каскадные, комбинированные, взаимосвязанные АСР [36]. Окончательное решение о применении той или иной схемы автоматизации принимают после моделирования различных АСР и сравнения качества получаемых процессов регулирования. 5.1. Схемы регулирования основных технологических параметров К основным технологическим параметрам, подлежащим контролю и регулированию в химико-технологических процессах, относят расход, уровень, давление, температуру, значение рН и показатели качества (концентрацию, плотность, вязкость и др.). Регулирование расхода. Необходимость регулирования расхода возникает при автоматизации практически любого непрерывного процесса. АСР расхода, предназначенные для стабилизации возмущений по материальным потокам, являются неотъемлемой частью разомкнутых систем автоматизации технологических процессов. Часто АСР расхода используют как внутренние контуры в каскадных системах регулирования других параметров. Для обеспечения заданного состава смеси или для поддержания материального и теплового балансов в аппарате применяют системы регулирования соотношения расходов нескольких веществ в одноконтурных или каскадных АСР. Системы регулирования расхода характеризуются двумя особенностями: малой инерционностью собственно объекта регулирования; наличием высокочастотных составляющих в сигнале изменения расхода, обусловленных пульсациями давления в трубопроводе (последние вызваны работой насосов или компрессоров или случайными колебаниями расхода при дросселировании потока через сужающее устройство).
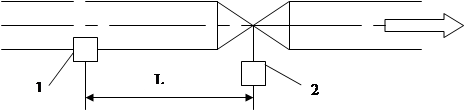
На рисунке 5.1 дана принципиальная схема объекта при регулировании расхода. Обычно таким объектом является участок трубопровода между точкой измерения расхода (например, местом установки сужающего устройства 1) и регулирующим органом 2. Длина этого участка определяется правилами установки и составляет обычно несколько метров. Динамика канала “расход вещества через клапан – расход вещества через расходомер” приближённо описывается апериодическим звеном первого порядка с чистым запаздыванием. Время чистого запаздывания обычно составляет доли секунд для газа и несколько секунд – для жидкости; значение постоянной времени – несколько секунд. Ввиду малой инерционности объекта регулирования особые требования предъявляются к выбору средств автоматизации и методов расчёта АСР. В частности, в промышленных установках инерционность цепей контроля и регулирования расхода становится соизмеримой с инерционностью объекта, и её следует учитывать при расчёте систем регулирования. Выбор законов регулирования диктуется обычно требуемым качеством переходных процессов. Для регулирования расхода без статической погрешности в одноконтурных АСР применяют ПИ-регуляторы. Если АСР расхода является внутренним контуром в каскадной системе регулирования, регулятор расхода может осуществлять П-закон регулирования. При наличии высокочастотных помех в сигнале расхода применение регуляторов с дифференциальными составляющими в законе регулирования без предварительного сглаживания сигнала может привести к неустойчивой работе системы. Поэтому в промышленных АСР расхода применение ПД- или ПИД-регуляторов не рекомендуется. В системах регулирования расхода применяют один из трёх способов изменения расхода: • дросселирование потока вещества через регулирующий орган, устанавливаемый на трубопроводе (клапан, шибер, заслонка); • изменение напора в трубопроводе с помощью регулируемого источника энергии (например, изменением числа оборотов двигателя насоса или угла поворота лопастей вентилятора); • байпасирование, т.е. переброс избытка вещества из основного трубопровода в обводную линию.
 (а) (б) (а) (б)
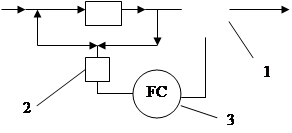
Рис. 5.2 Схемы регулирования расхода после центробежного (а) и поршневого (б) насосов: 1 – измеритель расхода; 2 – регулирующий клапан; 3 – регулятор; 4 – насос
Регулирование расхода после центробежного насоса осуществляется регулирующим клапаном, устанавливаемым на нагнетательном трубопроводе (рис. 5.2, а). Если для перекачивания жидкости используют поршневой насос, применение подобной АСР недопустимо, так как при работе регулятора клапан может закрыться полностью, что приведёт к разрыву трубопровода (или к помпажу, если клапан установлен на всасе насоса). В этом случае для регулирования расхода используют байпасирование потока (рис. 5.2, б). Регулирование уровня. Уровень является косвенным показателем гидродинамического равновесия в аппарате. Постоянство уровня свидетельствует о соблюдении материального баланса, когда приток жидкости равен стоку, и скорость изменения уровня равна нулю. Следует отметить, что “приток” и “сток” здесь являются обобщёнными понятиями. В простейшем случае, когда в аппарате не происходят фазовые превращения (сборники, промежуточные ёмкости, жидкофазные реакторы), приток равен расходу жидкости, подаваемой в аппарат, а сток – расходу жидкости, отводимой из аппарата. В более сложных процессах, сопровождающихся изменением фазового состояния веществ, уровень является характеристикой не только гидравлических, но и тепловых и массообменных процессов, а приток и сток учитывают фазовые превращения веществ. Такие процессы протекают в испарителях, конденсаторах, выпарных установках, ректификационных колоннах и т.п.
|