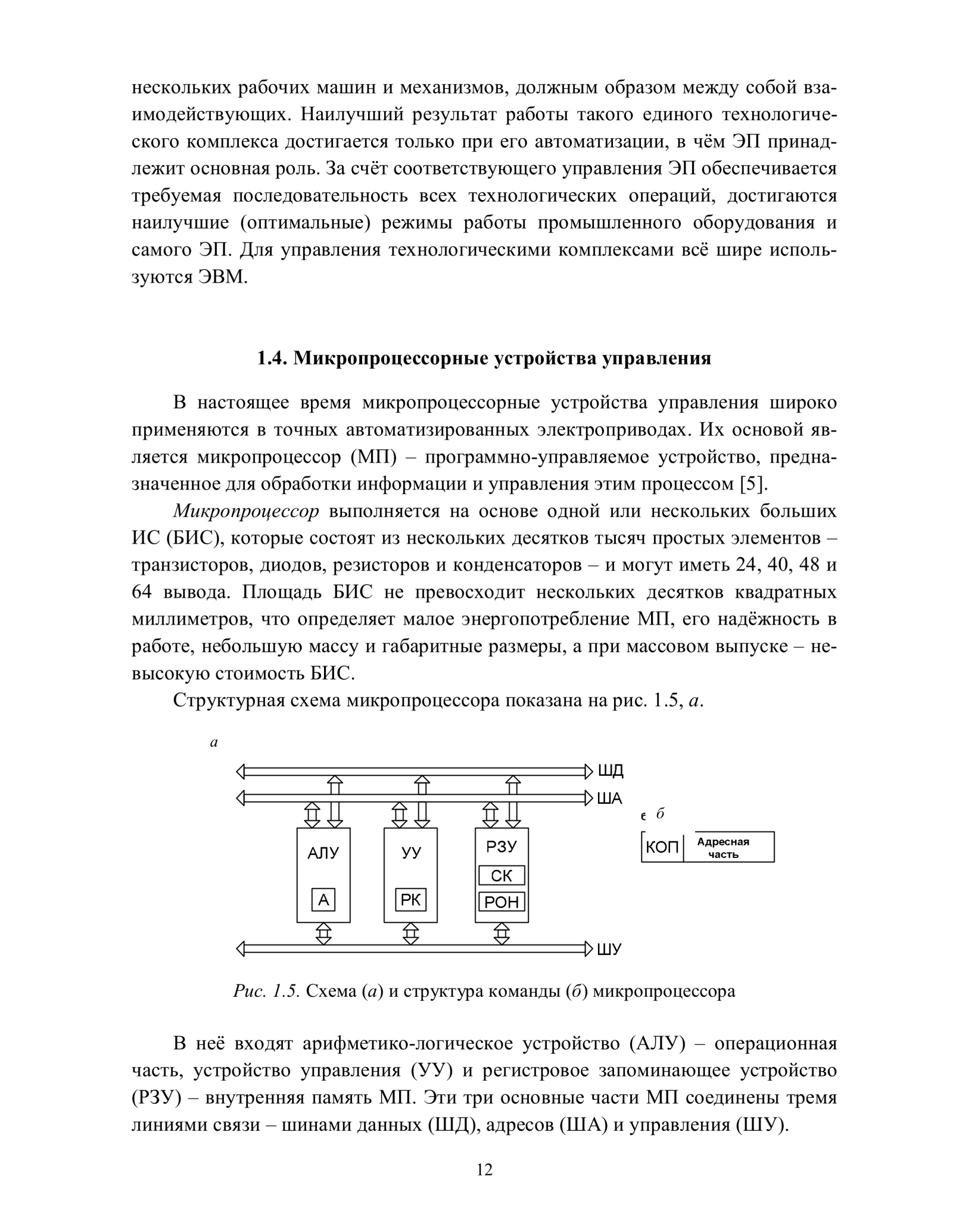
Микропроцессорные устройства управленияВ настоящее время микропроцессорные устройства управления широко применяются в точных автоматизированных электроприводах. Их основой является микропроцессор (МП) – программно-управляемое устройство, предназначенное для обработки информации и управления этим процессом [5]. Микропроцессор выполняется на основе одной или нескольких больших ИС (БИС), которые состоят из нескольких десятков тысяч простых элементов – транзисторов, диодов, резисторов и конденсаторов – и могут иметь 24, 40, 48 и 64 вывода. Площадь БИС не превосходит нескольких десятков квадратных миллиметров, что определяет малое энергопотребление МП, его надёжность в работе, небольшую массу и габаритные размеры, а при массовом выпуске – невысокую стоимость БИС. Структурная схема микропроцессора показана на рис. 1.5, а. Рис. 1.5. Схема (а) и структура команды (б) микропроцессора
В неё входят арифметико-логическое устройство (АЛУ) – операционная часть, устройство управления (УУ) и регистровое запоминающее устройство (РЗУ) – внутренняя память МП. Эти три основные части МП соединены тремя линиями связи – шинами данных (ШД), адресов (ША) и управления (ШУ). Микропроцессор является элементом управления с гибким алгоритмом работы. Изменение алгоритма функционирования схемы достигается за счёт замены одной программы на другую. Арифметико-логическое устройство (АЛУ) предназначено для выполнения арифметических и логических операций над данными в виде двоичных чисел. Данные, с которыми производятся эти операции, называются операндами. Обычно в операции участвуют два операнда, один из которых находится в специальном регистре – аккумуляторе А, а другой – в регистрах РЗУ. Регистровое запоминающее устройство содержит несколько регистров общего назначения (РОН), а также регистров специального назначения, в частности счётчик команд (СК). Управляющее устройство (УУ) предназначено для выработки сигналов управления, обеспечивающих работу блоков МП. В состав УУ входит регистр команд (РК), в котором фиксируется выполняемая в данный момент команда. Команды, обеспечивающие реализацию заданного алгоритма обработки информации, образуют программу и выполняются в пошаговом режиме строго в записанной последовательности. Каждая команда программы содержит информацию о том, что нужно делать, с какими операндами и по какому адресу поместить результат операции. Структура команды представлена на рис. 1.5, б. Первая часть команды содержит код операции (КОП), т. е. информацию о характере выполнения операции над операндами (например, сложение, логическое сложение и т. д.). Вторая часть команды – адресная – содержит адреса расположения операндов, с которыми производится данная операция, и адрес регистра или ячейки памяти, куда должен быть помещён результат. Команды, адреса и операнды МП записываются двоичными многоразрядными числами. В современных МП используются восьми- и шестнадцатиразрядные числа. Использование в МП многоразрядных двоичных чисел позволяет повысить их быстродействие и точность работы. Программа (совокупность команд) МП может быть записана несколькими способами. Первый из них предусматривает запись команд непосредственно в виде двоичных чисел, т. е. в виде так называемого машинного кода, понятного данному МП. Более удобным является использование языков программирования. Языки низкого уровня типа Ассемблер как средство общения с МП включают в себя несколько десятков типовых команд, представленных в условных мнемокодах. Например, язык этого типа для отечественного восьмиразрядного МП типа К580 включает в себя около 80 основных команд – арифметических, логических, пересылки данных, передачи управления и ряд других. Ещё большие возможности и удобства пользователю микропроцессорными схемами управления предоставляют языки программирования высокого уровня: ФОРТРАН, ПАСКАЛЬ МТ+, ПЛ/М, Бейсик-80, СИ, АДА и их разновидности (диалекты). Составленные на этих языках программы далее транслируются (переводятся) с помощью специальных программ – кросс-программ – в систему машинных кодов, понятных МП. Тот или иной язык используется только на этапе программирования, оперирует МП при своей работе с двоичными числами. Представленный на рис. 1.5 МП не может быть непосредственно использован для управления ЭП. Для выполнения функции управления схема МП дополняется целым рядом блоков, в результате чего образуется микропроцессорная система (МПС), структурная схема которой приведена на рис. 1.6.
В состав МПС, наряду с МП, в общем случае входят устройства памяти ОЗУ и ПЗУ, интерфейсное устройство (ИУ), устройства сопряжения (УС) с внешними объектами; внешние запоминающие устройства (ВЗУ), устройства ввода-вывода информации (УВВ), общая шина (ОШ), включающая в себя ШД, ШУ и ША. Устройства памяти ОЗУ и ПЗУ служат для размещения подлежащих обработке данных программы, в соответствии с которой эта обработка должна вестись, и результатов обработки. Для расширения возможностей МПС, кроме ОЗУ и ПЗУ, могут использоваться ВЗУ, к числу которых относятся накопители информации на гибких магнитных дисках, магнитной ленте, кассетные накопители. Устройства ввода-вывода информации предназначены для взаимодействия МПС и человека в удобной для него форме. К устройствам ввода-вывода относятся клавиатура пульта управления МПС, печатающая машинка (принтер), графопостроители, устройства визуального представления информации (дисплеи) и т. д. Устройства сопряжения обеспечивают связь МПС с различными внешними (периферийными) устройствами. Они могут иметь самые разнообразные схемные и элементные реализации. В частности, для согласования (связи) МПС с датчиками координат и схемой управления ЭП используются аналогоцифровые (АЦП) и цифроаналоговые (ЦАП) преобразователи электрических сигналов, обозначенные на схеме УС1 и УС2. Устройства сопряжения УС3 и УС4, предназначенные для связи МПС и ВЗУ и УВВ, представляют собой в простейшем случае буферные (промежуточные) регистры памяти для хранения данных, передаваемых с ОШ на внешние устройства или обратно. Устройства сопряжения, получившие название контроллеров (микроконтроллеров), выполняют более сложные функции, и их работа может программироваться. Устройства сопряжения УС5 выполняют согласование работы данной МПС с другими МПС и ЭВМ. Интерфейсное устройство (ИУ) – это совокупность электронных схем, шин и программ, обеспечивающая управление передачей информации между МП, памятью и внешними устройствами, к которым относятся УВВ, ВЗУ и Д. Говоря кратко, ИУ обеспечивает требуемое взаимодействие МПС с указанными внешними устройствами при изменении режима её работы. Типичным примером является переход от выполнения одной программы к выполнению другой при поступлении от какого-либо внешнего устройства сигнала управления. Такой переход получил название прерывания. После завершения прерывающей программы ИУ обеспечивает возврат МПС к работе по прерванной программе. Примерами ИУ являются таймер, блок прямого доступа к памяти, блок организации прерываний. Отметим, что совокупность МП, памяти и интерфейса, который включает в себя ИУ, УС и ОШ, получила название микроЭВМ. По назначению МПС и микроЭВМ подразделяются на универсальные и специализированные. Широко распространённым примером специализированной МПС является программируемый контроллер (ПК). Применение ПК позволяет избежать недостатков, которые характерны для схем с жёсткой логикой. Программируемый контроллер – это специализированная МПС, предназначенная для обработки логических входных сигналов, их преобразования и выработки управляющих воздействий на ЭП и работающая на заранее заданной программе. Процесс обработки поступающей информации и выработки управляющих воздействий осуществляется в ПК по программе и происходит в реальном масштабе времени. Схема программируемого контроллера представлена на рис. 1.7. Рис. 1.7. Схема программируемого контроллера
В состав ПК входят запоминающее устройство (ЗУ), в котором содержится программа его работы; логический процессор (ЛП), осуществляющий логические операции над последовательно вводимыми в него сигналами; коммутаторы входных К1 и выходных К2 сигналов; устройства сопряжения ПК с входными УС1 и выходными УС2 сигналами; память (П), в которую поступают результаты выполнения логических операций. Входные сигналы U вх1, U вх2,…, Uвхi, содержащие информацию о ходе технологического процесса, режимах работы отдельных частей ЭП, состоянии защиты и т. д., поступают на вход устройства сопряжения УС1, которое обеспечивает их гальваническую развязку и формирование из них сигналов, соответствующих величине и виду используемых в данном ПК. Сформированные таким образом сигналы поступают на вход коммутатора К1, который последовательно подаёт на ЛП тот из них, адрес которого содержится в очередной команде, поступающей на ЗУ. После выполненных ЛП преобразований, которые также определяются заложенной в ЗУ программой, сигналы через коммутатор К2 поступают в регистр памяти П и далее через УС2 на выход ПК. В качестве выходных допускаются сигналы напряжением от 5 до 250 В постоянного и переменного тока, общее число которых может достигать тысячи и более. Выходные устройства сопряжения УС2 обычно строятся на основе оптронных тиристоров, обеспечивающих гальваническую развязку выходных цепей и позволяющих управлять достаточно мощными исполнительными устройствами – реле, контакторами, катушками электромагнитов и др.
|