Классификация систем автоматики.Система автоматики классифицируется по различным признакам: 1. В зависимости от степени автоматизации: Ручное: Процесс управления осуществляется оператором. Автоматизированная система: - это человека машинная система. Часть процесса управления осуществляется оператором и ЭВМ, другая часть автоматическим устройством. Автоматическая система: процесс управления осуществляется автоматическим устройством.
2. По способу воздействия на регулирующий орган (РО): Система прямого действия, у которых изменения положительны РО осуществляется непосредственно датчиком (чувствительным элементом). Система непрямого действия, у которых изменения положительны РО осуществляется с помощью вспомогательных механизмов, которое питается от постоянного источника.
3. По характеру регулирования во времени: Непрерывное, у которых за отклонением регулируемой величины, получая непрерывное воздействие непосредственно от датчика. Дискретное, у которых РО перемещается перерывом через некоторые промежутки времени, задаваемым регулятором. (Позиционные регулирования осуществляется при помощи реле)
4. По виду уравнении описывающих раб.дин.сист. Линейные системы. Описывающиеся линейными дифференциальными уравнениями. Нелинейные системы. Поведение системы описывается не линейными дифференциальными уравнениями.
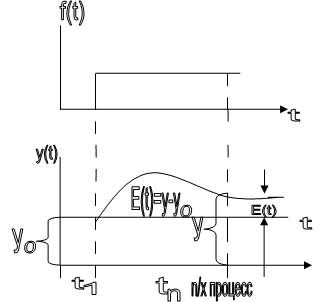
5. По виду регулирования. Статические (пропорциональные) – это такое регулирование когда регулируемый параметр y(t) после п/х процесса принимает новое значение, отличное от первоначального.
Остаточное отклонения E(t)= y – y0 регулируемого параметра называют статической ошибкой. При статических регулированиях каждому значению регулируемого параметра соответствует определенное положение регулирующего органа РО, т.е. относится к системе прямого действия.
Астатическое – это регулирование, когда регулируемый параметр после п/х процесса возвращается к первоначальному значению.
Статическая ошибка равна нулю. При астатическом регулировании РО может занимать различное положение при одном и том же значении регулируемого параметра y(t) (система не прерывного действия).
Недостаток: Процесс регулирования протекает долго.
6. По закону изменения регулируемых параметров.
Стабилизирующая АСР – поддерживает на постоянном уровне (с допустимой ошибкой) регулируемый параметр независимо от действующих возмущений. Система автоматической стабилизации характеризуется тем, что в процессе работы системы управляющее (регулирующее) воздействие остается величиной постоянной.
Программная АСР – система программного регулирования отличается тем, что управляющее воздействие изменяется по заранее установленному закону в функции времени или координации (координационной) системе, а управляемый параметр с допустимой ошибкой должен повторять закон изменения управляющего воздействия. Отклонение между регулирующими воздействиями и регулируемым параметром используется для управления исполнительным механизации. Следящая АСР. В следящих системах управляющее воздействиетакже является переменной, но закон его изменения во времени и координации (координационной) системе заранее не известен, так как источником сигнала служит внешнее случайное явление. Задачей следящей АСР является воспроизведение на выходе управляющего воздействия, при этом ошибка в следящих системах (разность между управляющим воздействием и регулируемым параметром) является управляющим сигналом для исполнительного механизма.
|