
ВЫБОР ЭЛЕКТРОДВИГАТЕЛЯ ДЛЯ ВЕРТИКАЛЬНОГОСОДЕРЖАНИЕ
ВВЕДЕНИЕ
Целями настоящего курсового проекта является проектирование электрического привода наклонного подъёмника с противовесом. Выполнение расчётов для определения момента необходимого развивать электродвигателю для подъёма гружёной тележки выполнение, анализа принципа работы электрической схемы автоматического управления электроприводом вентиляционной установки. В рамках первой цели решаются следующие задачи: - определяется приведённый момент нагрузки ЭД. - определяется расчётная мощность, и выбирается марка ЭД. - строится пусковая диаграмма ЭД и определяется число и величина пусковых резисторов. Итогом расчёта вертикального подъёмника является расчёт приведённого момента инерции кинематической части электропривода при его движении с грузом и без груза. В рамках второй цели решаются следующие задачи: - определяется назначение данной схемы. - определяются основные элементы схемы и органы её управления. - рассматривается работа схемы в исходном состоянии, при команде пуск «вперёд», команде пуск «назад» и её остановка. - определяется защита и питание цепей схемы. ВЫБОР ЭЛЕКТРОДВИГАТЕЛЯ ДЛЯ ВЕРТИКАЛЬНОГО ПОДЪЁМНИКА 1.1 Определение приведённого момента нагрузки Схема состоит из электрического двигателя (ЭД) переменного тока с фазным ротором (ЭД), понижающего редуктора который состоит из трёх ступеней понижения числа оборотов. Для передачи вращающего момента в схеме имеются две соединительные муфты: М1 – муфта соединяет вал ЭД и вал редуктора и муфты М2 – которая соединяет выходной вал редуктора и ведущий шкив подъёмника. В схеме имеется электромагнитный тормоз (Т), который затормаживает ротор ЭД при любом отключении питания ЭД. Это сделано для того чтобы неуравновешенный подъёмник не раскрутил ротор двигателя после отключения питания, как в нормальном режиме работы, так и при аварии в системе электроснабжения цеха. На схеме имеются следующие обозначения: z1, z2, z3, z4, z5, z6 – число зубцов шестерен понижающего редуктора. МС ,Н∙м – момент сопротивления на валу электродвигателя М1, М2, М3,Н∙м - моменты на валах понижающего редуктора mк ,кг – масса кабины подъёмника mг,кг – масса противовеса который позволяет снизить момент сопротивления МС на валу электродвигателя и тем самым снизить мощность и массогабаритные параметры выбираемого ЭД. Рассчитаем приведённый момент нагрузки МС при движении груза вверх. Для этого запишем выражение для мощности на валу ЭД (1):
Запишем выражение для определения мощности исполнительного механизма (2):
Сам исполнительный механизм показан на рисунке 1:
Рисунок 1 Исполнительный механизм для управления кабиной
Рассчитаем исполнительный момент по формуле (3):
Запишем уравнение связывающее мощность на валу двигателя и мощность исполнительного механизма учтём при этом КПД каждой механической передачи (5):
Продолжим расчёт:
где
где
где
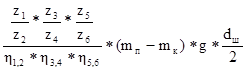
Рассчитаем момент сопротивления на валу двигателя при движении кабины вверх (6):
На рисунке 2 показан исполнительный механизм для управления кабиной:
Рисунок 2 Исполнительный механизм для управления кабиной Рассчитаем момент сопротивления на валу двигателя при движении кабины вниз по формуле (8):
|
 , (1)[6]
, (1)[6] , (2)[6]
, (2)[6]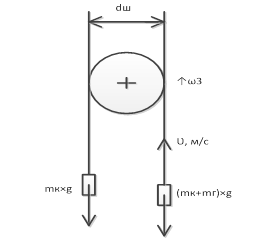
 Н∙ м (3)[6]
Н∙ м (3)[6]
 (Н∙м) (4)[6]
(Н∙м) (4)[6] (5)[6]
(5)[6]
 – КПД зубчатой передачи
– КПД зубчатой передачи 

 – КПД зубчатой передачи
– КПД зубчатой передачи 

 – КПД зубчатой передачи
– КПД зубчатой передачи 
 – КПД передачи с использованием шкивов.
– КПД передачи с использованием шкивов.

 , (6)[6]
, (6)[6] (Н∙м) (7)[6]
(Н∙м) (7)[6]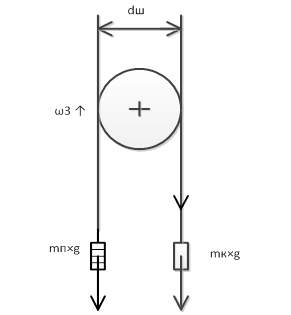
 =
=  (8)[6]
(8)[6] (9)[6]
(9)[6]


