Определение сил действующих на винтПри транспортировании материала по желобу на винт действуют силы трения материала о желоб, о поверхность винта, и др. Влияние всех сил, действующих на вал винта, можно определить по известной мощности на валу винта. Крутящий момент передаваемый валом винта определяется по формуле:
Мк=9750 ∙ (N0/n), (3.21)
где Мк - крутящий момент передаваемый валом винта, Н∙м; N0-мощность на валу винта, кВт; n-частота вращения винта, мин-1; Мк = 9750∙14,99/54,77 = 2668 Н∙м. Величина крутящего момента в пределах одной секции винта принимается постоянной. Максимальный крутящий момент Мк действует только на головную секцию винта. Величина крутящего момента, действующего на каждую последующую секцию, уменьшается на величину Мк/nc, где nc –число всех секций винта. Продольная сила P, действующая на головную секцию винта:
Р = Мк / (r∙tg(α+φ)), (3.22)
где Р- продольная сила, Н; r - радиус, на который действует сила Р; r = (0.35…0.4)∙D α – угол подъёма винтовой линии винта на радиусе; φ – угол трения груза о поверхность винта. α =arctgS/πД (3.23) φ=arctgf (3.24) α = arсtg 0,240/3,14*0,3=14,280 φ = arctg 0,47 = 25,170 r = 0,4∙ 0,3 = 0,12 м Р =2668/(0.12∙tg(14,280+25,170))= 27019Н=27,019кH Принято считать, что сила Р распределяется поровну по всем виткам вала. Тогда продольная сила Рв, приходящаяся на один виток винта и приложенная на радиусе r, определяется по формуле: Рв = Р ∙ S / L, (3.23) Рв - продольная сила на один виток, Н; L – длина винта, м; Рв = 27019∙ 0,240 / 30 = 216,152 Н Силы Рв создают нагибающий момент на валу винта, действие которых равносильно действию сосредоточенных моментов приложенных на расстоянии S- шага друг от друга по длине винта. Мв = Рв∙ r, (3.24)
Мв - нагибающий момент на валу винта, Н∙м; Мв = 216,152 ∙ 0.12 = 25,93 Н∙м Расчетная схема и эпюра изгибающих моментов от этой силы представлены на рисунке 3.4 б)
Рисунок 3.4 б) Поперечная сила разделяется поровну между секциями и витками. Величина силы Н, приходящаяся на один виток винта:
Н = Мк∙l /(r∙L) (3.25)
где Н - поперечная сила, кН∙м; l/L- отношение пролета между опорами к полной длине всего вала.; Н = 2668∙3/(0,12∙30) = 2223,33 кН∙м Силы Н создают изгибающий момент на валу винта и приложены на расстоянии шага друг от друга по его длине. Они действуют в одной плоскости с силами Рв, но перпендикулярны друг другу. Расчетная схема и эпюра изгибающих моментов от этих сил представлена на рисунке 3.4 в)
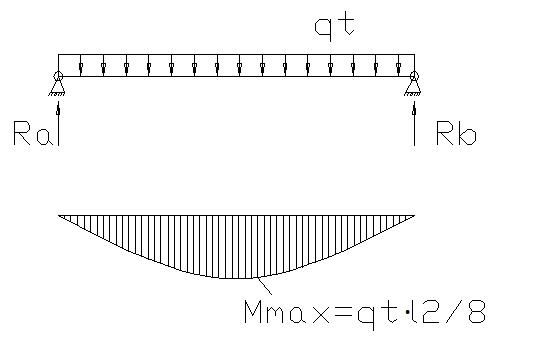
На винт действует еще равномерно распределенная сила от его погонной массы:
Ммаx=qт ∙l2 /8 (3.26)
где l-длина пролета. Ммаx = (80∙0,3)∙32/8 = 27 Н∙м Расчётная схема и эпюра изгибающего момента от этих сил представлена на рисунке 3.4 г)
С некоторой погрешностью можно допустить, что изгибающие моменты от погонной массы винта Ммаx и от продольных сил Мв действуют в одной плоскости, т.е. суммарный момент от их действия:
М∑ = Ммаx+Мв (3.27)
где М∑ - суммарный момент, Н∙м Ммаx - изгибающие моменты от погонной массы винта, Н∙м; Мв - изгибающие моменты от продольных сил, Н∙м;
Рисунок 3.4 г)
М∑ = 27+25,93 = 52,93 Н∙м Приведенный изгибающий момент от действия всех сил, действующих на вал винта рассчитывается по формуле:
Мпр = (М∑2 + Мн2)1/2 (3.28)
где Мпр - приведенный изгибающий момент от действия всех сил, действующих на вал винта, Н; Мпр = (52,932 + 26682)1/2 = 2668,52 Н
|