СТРУКТУРНЫЙ АНАЛИЗ МЕХАНИЗМАФедеральное агентство по образованию Новосибирский технологический институт Московского государственного университета дизайна и технологии (филиал)
АНАЛИЗ РЫЧАЖНОГО МЕХАНИЗМА
Методические указания к выполнению контрольных работ И расчетно-графических работ по дисциплине «Теория механизмов и машин» Для всех специальностей
Новосибирск 2007 Разработчик доц., к.т.н. Ермолаев В.Ф. Рецензент проф., д.т.н. Подгорный Ю.И. Работа выполнена на кафедре механики НТИ МГУДТ (филиал)
СТРУКТУРНЫЙ АНАЛИЗ МЕХАНИЗМА Рассмотрим в качестве примера плоский рычажный шестизвенный механизм (рисунок 1), параметры которого приведены в таблице 1.
Таблица 1 - Параметры плоского шестизвенного механизма
Число степеней свободы плоских механизмов рассчитывают по формуле [1]:
где Для данного механизма:
Вращательные и поступательные кинематические пары относятся к парам 5 класса (рисунок 2). Любой плоский рычажный механизм, то есть механизм с низшими парами или парами 5 класса, состоит из механизма первого класса (входного звена с одной степенью свободы) и структурных групп звеньев с нулевой степенью подвижности (групп Ассура). Группа Ассура подчиняется формуле
Из последнего уравнения следует, что число подвижных звеньев Для установления класса механизма следует разложить его на механизм первого класса и группы Ассура (рисунок 3). Рассматриваемый механизм относится ко второму классу, так как содержит только группы Ассура второго класса.
2 КИНЕМАТИЧЕСКИЙ АНАЛИЗ МЕХАНИЗМА Кинематический анализ – определение движения звеньев механизма по заданному движению начальных звеньев. Графические и графоаналитические методы анализа наиболее наглядны и просты в исполнении, но неточны. Рассмотрим метод планов скоростей и ускорений, который относится к графоаналитическим методам. Планом скоростей (ускорений) механизма называется чертеж, на котором изображены в виде отрезков векторы, равные по модулю и по направлению скоростям (ускорениям) различных точек механизма в данный момент. Сформулируем свойства планов скоростей и ускорений: 1) векторы абсолютных скоростей (ускорений) направлены из полюса; 2) векторы, соединяющие концы векторов абсолютных скоростей (ускорений), есть векторы относительных скоростей (ускорений); 3) точки, у которых скорости (ускорения) равны нулю, расположены в полюсе;
5) планы скоростей и ускорений позволяют определять величину и направление угловых скоростей и ускорений. Для механизма, положение которого определяется углом
Входное (ведущее) звено АВ совершает вращательное движение c постоянной угловой скоростью
На поле чертежа произвольно выбирается точка
В плоскопараллельном движении скорость точки С определяется из системы уравнений:
Относительные скорости
Скорость точки Е определяется на основании свойств подобия (векторы относительных скоростей образуют на плане скоростей фигуру, подобную жесткому контуру на плане механизма), для чего отрезок
Скорость точки F определяется из следующего уравнения:
Скорость
Скорости центров масс звеньев определяются на основании свойств подобия (свойство планов скоростей и ускорений пункт 4). Например, скорость центра масс Аналогично определяются скорости центров масс других звеньев. Построение плана ускорений (рисунок 5) производится в следующей последовательности. Ускорение точки В определится из следующего уравнения:
Нормальное ускорение точки В
Ведущее звено АВ вращается с постоянной угловой скоростью
В плоскопараллельном движении ускорение точки С определяется из системы уравнений:
Нормальные ускорения точки С
Ускорение точки D равно нулю. Последовательность графических построений по уравнениям (7) приведена на плане ускорений (рисунок 5). Вначале из точек Ускорение точки Е определяется также на основании свойств подобия отрезков на плане ускорений и жестких контуров на кинематической схеме механизма: Ускорение точки F определяется из следующего уравнения:
Ускорение
Последовательность построений по уравнению (8) на плане ускорений: из полюса Ускорение центров масс звеньев 2, 3 и 4 определяются также как и их скорости из свойств подобия. По планам скоростей и ускорений определяются также угловые скорости и угловые ускорения звеньев:
Для определения направления угловой скорости, например, звена 2, вектор 3 СИЛОВОЙ АНАЛИЗ МЕХАНИЗМА Задачей силового анализа механизма является определение реакций в кинематических парах механизма и уравновешивающих сил или моментов при известных внешних силах и заданном законе движения ведущих звеньев. При решении задачи силового анализа механизмов используется принцип Даламбера, согласно которому звено механизма может рассматриваться как находящееся в равновесии, если ко всем внешним силам, действующим на него, добавить силы инерции. Уравнения равновесия в этом случае называют уравнениями кинетостатики.
3.1 Определение сил, действующих на звенья механизма 3.1.1 Определение сил тяжести звеньев Силы тяжести звеньев рычажного типа определяются по формуле
где Масса звеньев рычажного типа задается зависимостью:
где Масса ползуна задается как
где j – любое целое число, задаваемое преподавателем. Силы полезного сопротивления Для рассматриваемого механизма принимаем
Аналогично определяются силы тяжести других звеньев. Результаты расчета сил тяжести приведены в таблице 2. Таблица 2 - Результаты расчета сил тяжести
3.1.2 Определение сил и моментов сил инерции звенье в Векторы сил инерции звеньев и их численные значения находятся по формуле
где Векторы моментов сил инерции и их численные значения находятся по формуле
где Центры масс стержней находятся посередине их длины, тогда моменты инерций рассчитываются по формуле
Ускорения центров масс звеньев и угловые ускорения звеньев механизма определяются из плана ускорений (рисунок 5). Результаты расчетов сведены в таблицу 3. Таблица 3 - Результаты расчета ускорений звеньев механизма
Определим силы и моменты сил инерции звеньев для рассматриваемого механизма: 1-е звено: 2-е звено: Силы инерции и моменты сил инерции для остальных звеньев механизма определяются аналогично. Результаты расчетов сведены в таблицу 4.
Таблица 4 - Результаты расчета сил инерции и моментов сил инерции
3.2 Определение реакций в кинематических парах механизма Силовой расчет плоских механизмов ведется по группам Ассура, причем начинать расчет следует с группы Ассура, которая наиболее удалена от ведущего звена. Силовой анализ выполняется как графическими методами, так и аналитическими методами [1]. Графическое определение реакций в кинематических парах плоских механизмов путем построения планов сил применяется не только вследствие наглядности, но и потому, что внешние силы, действующие на звенья механизма, обычно известны лишь приближенно и точность простейших графических построений часто оказывается вполне достаточной.
3.2.1 Расчет первой группы Ассура Для рассматриваемого механизма наиболее удаленной, т.е. первой группой Ассура, является группа, состоящая из звеньев 4-5 – это группа второго класса с внешней поступательной парой. Для определения графическим методом реакций в кинематических парах этой группы строится расчетная схема (рисунок 7). Линейные размеры группы изображаются в масштабе, например,
Ползун (звено5) соприкасается в механизме со стойкой (звено 0). В группе же стойку отбросили, поэтому действие звена 0 на звено 5 надо заменить неизвестной по величине реакций В кинематической паре Е звено 4 соприкасается со звеном 3. Звено 3 отбрасываем и действие звена 3 на звено 4 заменим неизвестной реакцией Для определения силы
где
Знак минус означает, что в действительности тангенциальная составляющая Величины реакций Условие равновесия группы в векторной форме имеет вид
Построение плана сил можно начинать с любой известной силы, если масштаб построения выбран заранее. Построение плана сил начнем с построения вектора силы
На плане сил через векторы
3.2.2 Расчет второй группы Ассура Вторая группа Ассура состоит из звеньев 2-3 – это группа также второго класса с тремя вращательными кинематическими парами. Построим расчетную схему для группы в том же масштабе Действие четвертого звена на третье в точке Е определено при расчете первой группы
Для нахождения тангенциальных составляющих
Нормальные составляющие
Построение плана сил (рисунок 10) можно начинать с любого известного вектора силы, предварительно выбрав масштаб Складывая векторы Из плана сил определяем численные значения векторов
3.2.4 Определение сил, действующих на входное звено Расчетная схема входного (ведущего) звена в масштабе с коэффициентом
Из уравнения (20) построением плана сил (рисунок 10б) находим реакцию
Из плана сил (рисунок 10 б)определяем модуль реакция
Уравновешивающий момент:
Результаты определения реакций в кинематических парах механизма и уравновешивающего момента сведены в таблицу 5. Таблица 5 – Значения реакций в кинематических парах механизма
4 ОПРЕДЕЛЕНИЕ УРАВНОВЕШИВАЮЩЕГО МОМЕНТА МЕТОДОМ «РЫЧАГА ЖУКОВСКОГО» Теорема Жуковского. Если силу, приложенную к какой-либо точке звена плоского механизма, перенести параллельно самой себе в одноименную точку повернутого плана скоростей, то момент этой силы относительно полюса плана будет пропорционален ее мощности. На рисунке 11 приведен «рычаг Жуковского», который представляет собой повернутый на 90 градусов план скоростей (отрезок На основании общего уравнения динамики сумма мощностей всех внешних сил, приложенных к
По условию теоремы Жуковского, это уравнение равносильно уравнению моментов относительно полюса повернутого плана скоростей
Так как по условию теоремы Жуковского переносятся только силы, то вместо моментов надо перенести пары сил:
Уравнение (21) будет иметь следующий вид:
Из уравнения (22) определяется неизвестная сила
Уравновешивающий момент:
Относительная п
|
 ,
,


 , (1)
, (1) - число подвижных звеньев,
- число подвижных звеньев,  - число кинематических пар пятого класса,
- число кинематических пар пятого класса,  - число кинематических пар четвертого класса.
- число кинематических пар четвертого класса.
 Кинематические пары механизма приведены на рисунке 2.
Кинематические пары механизма приведены на рисунке 2. или
или 
 4) векторы относительных скоростей (полных относительных ускорений) образуют на плане скоростей (ускорений) фигуру, подобную жесткому контуру на плане механизма;
4) векторы относительных скоростей (полных относительных ускорений) образуют на плане скоростей (ускорений) фигуру, подобную жесткому контуру на плане механизма; (рисунок 1), на рисунке 4 приведен план скоростей, а на рисунке 5 – план ускорений.
(рисунок 1), на рисунке 4 приведен план скоростей, а на рисунке 5 – план ускорений.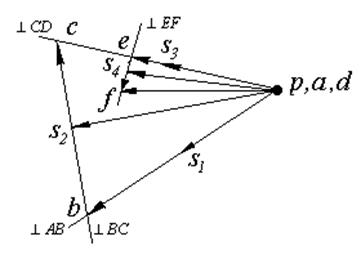


 , модуль скорости точки В определяется по формуле:
, модуль скорости точки В определяется по формуле: . (2)
. (2) - полюс плана скоростей (рисунок 4). Из точки
- полюс плана скоростей (рисунок 4). Из точки  в мм (в соответствии с рисунком 4
в мм (в соответствии с рисунком 4  ) перпендикулярный АВ и направленный в сторону вращения АВ. Точка А звена АВ неподвижна и будет находиться в полюсе
) перпендикулярный АВ и направленный в сторону вращения АВ. Точка А звена АВ неподвижна и будет находиться в полюсе  .
.
 (3)
(3) и
и  направлены перпендикулярно звеньям ВС и CD. Точка D звена CD неподвижна и будет находиться в полюсе
направлены перпендикулярно звеньям ВС и CD. Точка D звена CD неподвижна и будет находиться в полюсе  плана скоростей проводим прямую перпендикулярно звену ВС, а через полюс
плана скоростей проводим прямую перпендикулярно звену ВС, а через полюс  пересечения этих прямых будет являться вектором абсолютной скорости точки С, а отрезок
пересечения этих прямых будет являться вектором абсолютной скорости точки С, а отрезок  в масштабе
в масштабе  будет являться вектором скорости
будет являться вектором скорости  . Отрезок
. Отрезок  будет являться вектором относительной скорости
будет являться вектором относительной скорости 
 на плане скоростей разбивается пропорционально отрезкам СЕ и ЕD на плане механизма:
на плане скоростей разбивается пропорционально отрезкам СЕ и ЕD на плане механизма: , откуда
, откуда  . Модуль скорости точки Е определится как
. Модуль скорости точки Е определится как 
 . (4)
. (4) при поступательном движении параллельна направляющим ползуна, а относительная скорость
при поступательном движении параллельна направляющим ползуна, а относительная скорость  направлена перпендикулярно звену EF. Скорость точки F определяется в соответствии с уравнением (4): из точки
направлена перпендикулярно звену EF. Скорость точки F определяется в соответствии с уравнением (4): из точки  проводится прямая перпендикулярно звену EF, а из полюса
проводится прямая перпендикулярно звену EF, а из полюса  пересечения этих двух прямых и будет концом вектора скорости точки F, а отрезок
пересечения этих двух прямых и будет концом вектора скорости точки F, а отрезок  в масштабе
в масштабе  будет являться вектором относительной скорости
будет являться вектором относительной скорости  . Модули скоростей
. Модули скоростей 
 звена 2 будет являться вектором
звена 2 будет являться вектором  ,проведенным из полюса
,проведенным из полюса  :
: 
 (5)
(5) направлено по звену АВ к центру вращения А, а его модуль определится по формуле:
направлено по звену АВ к центру вращения А, а его модуль определится по формуле: (6)
(6) , тогда его угловое ускорение
, тогда его угловое ускорение  равно нулю. Тангенциальное ускорение точки В определяется по формуле
равно нулю. Тангенциальное ускорение точки В определяется по формуле  , и также равно нулю. На поле чертежа произвольно выбирается точка
, и также равно нулю. На поле чертежа произвольно выбирается точка  - полюс плана ускорений. Из точки
- полюс плана ускорений. Из точки  в мм (в соответствии с рисунком 5
в мм (в соответствии с рисунком 5  ) параллельно АВ и направленный от точки В к точке А. Точка А звена АВ неподвижна и будет находиться в полюсе
) параллельно АВ и направленный от точки В к точке А. Точка А звена АВ неподвижна и будет находиться в полюсе  =
= 

 (7)
(7) и
и  направлены из точки С параллельно звеньям ВС и СD, а тангенциальные ускорения
направлены из точки С параллельно звеньям ВС и СD, а тангенциальные ускорения  и
и  - перпендикулярно звеньям ВС и СD. Модули нормальных ускорений точки С определяются по формулам:
- перпендикулярно звеньям ВС и СD. Модули нормальных ускорений точки С определяются по формулам:
 и
и  , из концов которых проводятся линии действия тангенциальных ускорений
, из концов которых проводятся линии действия тангенциальных ускорений  и
и  . Точка
. Точка  пересечения этих линий и будет концом вектора абсолютного ускорения
пересечения этих линий и будет концом вектора абсолютного ускорения  . Линия
. Линия  - план ускорений звена 3.
- план ускорений звена 3. , откуда отрезок
, откуда отрезок  . Модуль ускорения точки Е определится как
. Модуль ускорения точки Е определится как 
 . (8)
. (8) при поступательном движении параллельно направляющим ползуна. Нормальное ускорение
при поступательном движении параллельно направляющим ползуна. Нормальное ускорение  направлено из точки F параллельно звену EF. Модуль вектора
направлено из точки F параллельно звену EF. Модуль вектора  .
. проводится линия параллельно звену 4, вдоль которой (от точки F к точке Е) откладывается отрезок
проводится линия параллельно звену 4, вдоль которой (от точки F к точке Е) откладывается отрезок  . Так как отрезок
. Так как отрезок  , изображающий вектор
, изображающий вектор  проводится из точки
проводится из точки  .
.

 .
. (вектор относительной скорости точки С при вращении звена 2 вокруг точки В) переносится мысленно с плана скоростей в точку С звена 2 на плане механизма (
(вектор относительной скорости точки С при вращении звена 2 вокруг точки В) переносится мысленно с плана скоростей в точку С звена 2 на плане механизма ( направлено против часовой стрелки или его направление положительное). Аналогично определяется направление
направлено против часовой стрелки или его направление положительное). Аналогично определяется направление  по вектору относительного тангенциального ускорения
по вектору относительного тангенциального ускорения  , (9)
, (9) - масса звена;
- масса звена;  - ускорение свободного падения.
- ускорение свободного падения. , (10)
, (10) - длина звена, мм;
- длина звена, мм;  - коэффициент, величина которого задается преподавателем в пределах от 0,001 до 0,003 кг/мм.
- коэффициент, величина которого задается преподавателем в пределах от 0,001 до 0,003 кг/мм. ,
, прикладываются к ползунам, направляются в сторону противоположную их движению, численное значение задается в двадцать раз больше силы тяжести звена АВ.
прикладываются к ползунам, направляются в сторону противоположную их движению, численное значение задается в двадцать раз больше силы тяжести звена АВ. и
и  3, тогда
3, тогда (Н);
(Н); (Н).
(Н).







 ,
,  - сила инерции
- сила инерции  -го звена,
-го звена,  ;
;  - масса
- масса  ;
;  - ускорение центра масс
- ускорение центра масс  ;, (12)
;, (12) - момент сил инерции
- момент сил инерции  -го звена,
-го звена,  ;
; 
 - момент инерции
- момент инерции  и перпендикулярной к плоскости движения звена,
и перпендикулярной к плоскости движения звена,  ;
;  - угловое ускорение
- угловое ускорение  .
. . (13)
. (13)




















 , и к звеньям прикладываются все известные силы и моменты.
, и к звеньям прикладываются все известные силы и моменты.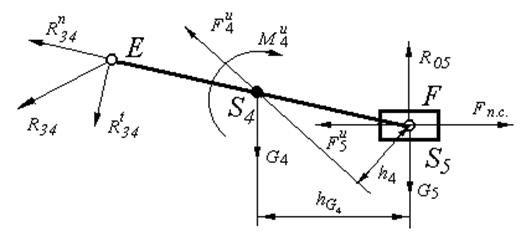

 , которая направлена по нормали к направляющей (силы трения не учитываем).
, которая направлена по нормали к направляющей (силы трения не учитываем). , направление которой проводится произвольно. Реакцию
, направление которой проводится произвольно. Реакцию  , которая направлена вдоль звена EF, и тангенциальную -
, которая направлена вдоль звена EF, и тангенциальную -  , которая направлена перпендикулярно звену.
, которая направлена перпендикулярно звену. составляется уравнение равновесия моментов всех сил, действующих на звено 4, относительно точки F:
составляется уравнение равновесия моментов всех сил, действующих на звено 4, относительно точки F:
 (15)
(15) - плечи соответствующих сил на расчетной схеме (рисунок 7). Из уравнения (15) находим
- плечи соответствующих сил на расчетной схеме (рисунок 7). Из уравнения (15) находим 
 находят с помощью построения плана сил (рисунок 8). Для этого графически складывают векторы всех сил, действующих на данную группу Ассура. Предварительно выбирают масштаб построения плана сил
находят с помощью построения плана сил (рисунок 8). Для этого графически складывают векторы всех сил, действующих на данную группу Ассура. Предварительно выбирают масштаб построения плана сил  , например
, например  , либо откладывается отрезок любой длины в направлении любой известной силы и определяется масштаб
, либо откладывается отрезок любой длины в направлении любой известной силы и определяется масштаб  , тогда
, тогда  .
. . (16)
. (16) . Затем складываем все известные векторы сил и реакций в следующей последовательности: к началу вектора
. Затем складываем все известные векторы сил и реакций в следующей последовательности: к началу вектора  , к началу вектора
, к началу вектора  , и так далее. Вектора сил складываем таким образом, чтобы начало одного вектора совпадало с концом другого вектора. Из конца вектора
, и так далее. Вектора сил складываем таким образом, чтобы начало одного вектора совпадало с концом другого вектора. Из конца вектора  , а из начала вектора
, а из начала вектора  проводим линию, параллельную линии действия вектора
проводим линию, параллельную линии действия вектора  . В точке пересечения линий действия
. В точке пересечения линий действия 

 и
и  находим вектор реакции
находим вектор реакции  . Из плана сил (рисунок 8) определяются численные значения векторов
. Из плана сил (рисунок 8) определяются численные значения векторов  ,
, 

 .
. (рисунок 9).
(рисунок 9). .В кинематических парах D и В со звеньями второй группы соприкасались звенья, соответственно 0 и 1, действия которых заменены реакциями
.В кинематических парах D и В со звеньями второй группы соприкасались звенья, соответственно 0 и 1, действия которых заменены реакциями  и
и  , направление которых выбрано произвольно. Реакции
, направление которых выбрано произвольно. Реакции  .
.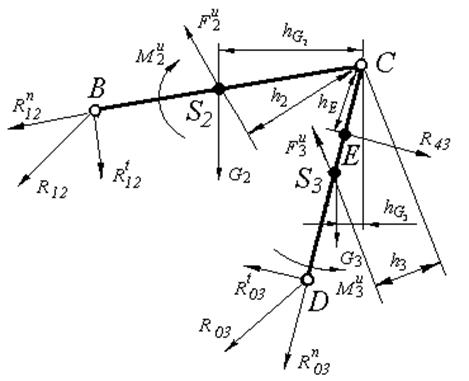

 составляются уравнения равновесия моментов всех сил действующих, соответственно, на звенья 2 и 3, относительно точки С (рисунок 9).
составляются уравнения равновесия моментов всех сил действующих, соответственно, на звенья 2 и 3, относительно точки С (рисунок 9).
 (17)
(17)
 , (18)
, (18)
 и
и  находятся из плана сил. Условие равновесия второй группы в векторной форме имеет вид
находятся из плана сил. Условие равновесия второй группы в векторной форме имеет вид . (19)
. (19) (например
(например  ), либо откладывается отрезок любой длины в направлении любой известной силы и определяется масштаб
), либо откладывается отрезок любой длины в направлении любой известной силы и определяется масштаб  также как и в предыдущей группе. Построение плана сил начнем с вектора силы
также как и в предыдущей группе. Построение плана сил начнем с вектора силы  , которая направлена противоположно
, которая направлена противоположно  ,
,  ,
,  , а к концу вектора
, а к концу вектора  ,
, 
 . Из конца вектора
. Из конца вектора  , а из начала вектора
, а из начала вектора  . В точке пересечения линий действия
. В точке пересечения линий действия  и
и  .
.

 ;
; .
. приведена на рисунке 11 а. Если входное звено выполнено как одно целое с ротором электродвигателя, двигателя внутреннего сгорания или любого другого источника движения, то система уравновешивается моментом
приведена на рисунке 11 а. Если входное звено выполнено как одно целое с ротором электродвигателя, двигателя внутреннего сгорания или любого другого источника движения, то система уравновешивается моментом  . Тогда для входного звена можно составить одно векторное уравнение суммы сил и одно скалярное уравнение суммы моментов сил относительно точки А:
. Тогда для входного звена можно составить одно векторное уравнение суммы сил и одно скалярное уравнение суммы моментов сил относительно точки А: (20)
(20) . (21)
. (21) . Из уравнения (21) определяется уравновешивающий момент
. Из уравнения (21) определяется уравновешивающий момент 
 :
: .
.






 направлен вдоль звена АВ, при этом полюс плана
направлен вдоль звена АВ, при этом полюс плана  совпадает с точкой А механизма) и силы, приложенные в точках, одноименных с точками приложения этих сил в механизме.
совпадает с точкой А механизма) и силы, приложенные в точках, одноименных с точками приложения этих сил в механизме. звеньям механизма, и мощностей сил инерции звеньев равна нулю:
звеньям механизма, и мощностей сил инерции звеньев равна нулю: (20)
(20) (21)
(21)

 ,
,  ,
,  . Величины этих составляющих определятся из условий:
. Величины этих составляющих определятся из условий:


 .
. (22)
(22) :
: