Петлевая обмотка.При петлевой обмотке первый шаг делается по окружности якоря в одну сторону, второй шаг — в противоположную (рис. 5-11, а), поэтому шаги петлевой обмотки связаны соотношением y 1 – y 2 = y = y к. (5-5) Обычно у1>y2 и y >0. Такая обмотка называется неперекрещенной или правой. Здесь при обходе секций мы будем все время смещаться вправо. При у1< у2 и у <0 получается перекрещенная или левая петлевая обмотка. В этом случае при обходе обмотки будем все время смещаться влево. Левая обмотка на практике почти не встречается. Число параллельных ветвей петлевой обмотки определяется числом полюсов 2 р и значением результирующего шага у. В общем случае число параллельных ветвей петлевой обмотки равно: 2 a = 2 py. (5-6) На рис. 5-11, а показаны две секции петлевой обмотки с шагом у = у к=1. Такая обмотка называется простои петлевой. Она имеет число параллельных ветвей, равное числу полюсов: 2 а = 2 р. Простые петлевые обмотки применяются для машин средней и большой мощности. Если у >1, то получается сложная петлевая обмотка. Петлевую обмотку называют также параллельной, и соответственно различают простую и сложную параллельные обмотки. На рис 5-12 приведена схема — развертка простой петлевой обмотки при Z э = S = K = 24, 2 p = 2 a = 4.
Рис. 5-12. Схема-развертка простой петлевой обмотки. Шаги обмотки взяты равными: y = y к = 1; y 1 = 6; y 2 = y 1 – y; y 2 = 5. Если схему начертить на полосе бумаги и обернуть ею цилиндр подходящих размеров, то мы получим наглядное представление о соединении секций между собой и с коллекторными пластинами. Для той же самой обмотки на рис. 5-12 а представлена так называемая радиальная схема.
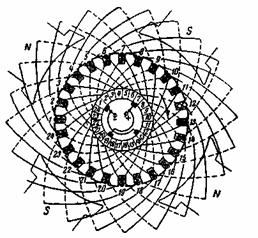
Рис. 5-12а. Радиальная схема простой петлевой обмотки (кривые вне якоря условно показывают лобовые соединения на задней стороне машины, кривые внутри якоря — лобовые соединения на ее передней стороне; см. рис. 5-12). На рис. 5-12 показаны полюсы и э.д.с, наведенные в секционных сторонах. Мы приняли, что полюсы расположены над обмоткой и что якорь относительно полюсов и щеток движется вправо. При выбранном положении якоря относительно полюсов получаются четыре параллельные ветви (2 а = 2 р = 4); они показаны на рис. 5-13, где цифрами без штриха обозначены верхние секционные стороны, а цифрами со штрихом — нижние.
Рис. 5-13. Параллельные ветви простой петлевой обмотки (см. рис. 5-12). При перемещении якоря некоторые секции замыкаются щетками. Они в это время не участвуют в создании э.д.с. параллельной ветви. Для рассматриваемого случая мы будем иметь то 6, то 5 секций в каждой параллельной ветви. В соответствии с этим напряжение на щетках будет несколько изменяться по величине, оставаясь постоянным по направлению. В практических случаях, когда взято на параллельную ветвь обмотки 15—20 и больше секций, коллекторные пульсации напряжения на щетках получаются меньше 1%. Щетки на рис. 5-12 и 5-12 а соприкасаются с коллекторными пластинами, соединенными с секционными сторонами, находящимися приблизительно посередине между главными полюсами, т. е. вблизи геометрической нейтрали. В этом случае считают, что щетки находятся приблизительно на геометрической нейтрали, имея в виду положение щеток не относительно полюсов, а относительно секционных сторон, с которыми они соединены. Щетки устанавливаются на геометрической нейтрали не только для того, чтобы иметь наибольшую э.д.с. в параллельной ветви, но и для того, чтобы в секциях, замыкаемых щетками почти накоротко, не могли образоваться большие токи.
|

 ;
;