Моделирование сухого трения
Структурная схема, приведенная на рисунке 1.8, отображает все взаимосвязи между параметрами и переменными в силовом приводе и объекте. Момент сопротивления, обусловленный сухим трением, в первом приближении считается не зависящим от скорости и описывается знаковой функцией:
Элемент, реализующий это уравнение нужно ввести в цепь отрицательной обратной связи из точки, где сигнал имеет размерность скорости, в точку, где он имеет размерность момента. Такая реализация приведена, например, в [2] и используется повсеместно не только в учебниках, но и в библиотеке Simulink для двигателя постоянного тока (Power System Blockset). Рассмотрим модель кинематической цепи с сухим трением в соответствии со структурной схемой, приведенной на рисунке 3.1.
Рис. 3.1. Кинематическая цепь с сухим трением
При скручивании вала, например, под действием мгновенного поворота на некоторый угол (step – функция) при отсутствии моментов сопротивления масса и упругие свойства приведут к незатухающим, как у математического маятника, колебаниям. Вязкое трение приведет к экспоненциально затухающим колебаниям. Наличие сухого трения также приведет к затуханию колебаний, продолжающихся до тех пор, пока система не «застрянет» в области, соответствующей Если воздействие не ступенчатое, а непрерывное, то под действием постепенно нарастающей силы система будет оставаться в покое до тех пор, пока эта сила не преодолеет момент сухого трения Однако ни в уравнении, ни тем более в модели никак не учитывается то обстоятельство, что не только в движении, но и при нулевой скорости сила реакции со стороны объекта в точности равна силе внешнего действия. То есть модель не отображает ситуации, когда сумма динамического момента и момента вязкого трения меньше момента сухого трения, когда система должна остановиться при изменяющемся входном воздействии. Так как и источник воздействия, и объект моделируются одновременно одной и той же программой, то при поступлении на вход системы нарастающего сигнала она сразу начинает движение, блок sign в обратной связи вырабатывает константу соответствующего знака, и устройство сравнения выдает сигнал ошибки, намного превышающий входной сигнал в данный момент. Движение объекта прекращается, но прекращается и нарастание сигнала на выходе источника. То есть в зоне действия сухого трения вместе с объектом тормозится и процесс моделирования источника воздействия. Это исключительно свойство алгоритма, противоречащее действительности, поскольку в реальности движение объекта подчинено внешнему сигналу, а не наоборот. После смены знака на выходе блока step процесс повторяется и возникает явление, аналогичное скользящему режиму в релейных системах – предмет строгого анализа в классической теории нелинейных систем. На выходе релейного элемента, роль которого здесь выполняет блок sign, возникают высокочастотные колебания и программа «зависает». Разница в том, скользящий режим отображает реальное поведение релейной системы, а в данном случае это свойство имеет программа, но не сама система. Если же входное воздействие вырабатывается функцией step, которая сразу принимает конечное значение, то процесс моделирования начинается и нормально продолжается до тех пор, пока система не попадет на границу, соответствующую области Обойти это затруднение можно различными способами. Во первых, путем составления соответствующих алгоритмов, исключающих влияние состояния объекта на источник воздействия, а, во вторых, попытаться использовать ресурсы имеющиеся программного средства. В данной ситуации, как это ни странно, препятствием является высокая точность, необходимая при моделировании непрерывных систем. В каждом периоде колебаний происходит небольшое изменение на выходе блока источника внешнего воздействия в соответствии с его математическим описанием. Приращение сигнала на его выходе тем меньше, чем выше точность вычисления. Поскольку же она очень велика, то выполнение программы практически останавливается. Поэтому достаточно заставить программу моделировать не непрерывную, а дискретную систему с достаточно малым шагом. Тогда частота колебаний будет определяться не точностью вычислений, а шагом дискретизации. Если интервал дискретизации задать много меньше постоянных времени системы, то её поведение мало будет отличаться от линейной. Имеются программные средства, например VisSim, предусматривающие переход от моделирования непрерывной системы к дискретной. В Simulink для этого можно воспользоваться блоком Zero-Order Hold, включенном на входе блока sign или соответствующей настройкой в команде Simulation Parameters. На рисунке 3.2 приведена схема модели в Simulink для реальной системы привода манипулятора в соответствии с физической моделью по рисунку 1.2 с учетом сухого трения.
Рис. 3.2. Дискретная модель системы с сухим трением
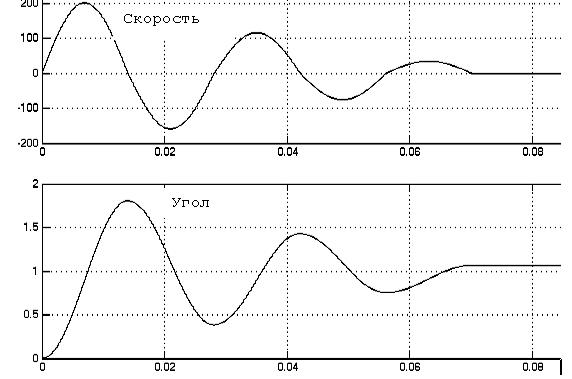
При дискретном изменении скорости в цепи обратной связи процесс моделирования резко ускоряется, и система быстро проходит критическую область. На рисунке 3.3 приведены результаты моделирования для скорости и угла поворота при единичном воздействии. Совершив два затухающих под действием тормозящего момента трения колебания, система останавливается, не доходя до положения равновесия, что достоверно отображает влияние сухого трения.
Рис. 3.3. Влияние сухого трения на движение системы
|
 . (3.1)
. (3.1)












 , где происходит то же явление торможения моделирования. То есть программа не может ни попасть в наиболее характерную в данном случае область
, где происходит то же явление торможения моделирования. То есть программа не может ни попасть в наиболее характерную в данном случае область