
ЗАДАНИЕ НА КУРСОВОЙ ПРОЕКТКОНТРОЛЬНЫЕ ВОПРОСЫ ДЛЯ САМОПРОВЕРКИ
1. Бюджетный дефицит, его причины и виды. Государственный долг. Проблемы бюджетного дефицита и государственного долга в Республике Беларусь. 2. Валовой внутренний продукт (ВВП). Принципы расчета ВВП. 3. Валютный рынок и валютный курс. Виды валютных курсов. 4. Возникновение и этапы развития экономической теории. 5. Государственный бюджет и его функции. Расходы и доходы бюджета. Бюджет Республики Беларусь. 6. Денежно-кредитная политика и ее инструмента. 7. Денежно-кредитная система и ее структура. Функции Центрального банка 8. Доход и прибыль предприятия. Общий, средний, предельный доход. 9. Инфляция, ее определение и измерение. Последствия инфляции. 10. Коммерческие банки и их функции. Специализированные кредитно-финансовые организации. 11. Макроэкономическое равновесие в модели AD-AS. Эффект храповика. 12. Методы экономической теории. 13. Мировая экономика: предпосылки возникновения и структура звеньев на современном этапе. 14. Налогообложение: сущность, принципы. Виды налогов. Налоговая система Республики Беларусь. 15. Национальное богатство, его состав и структура. 16. Номинальный и реальный ВВП. Индекс цен. 17. Нормальная прибыль. Экономическая и бухгалтерская прибыль. Правило максимизации прибыли. 18. Общий, средний и предельный продукт: понятие, измерение, взаимосвязь. 19. Основные формы международных экономических отношений. 20. Платежный баланс страны и его структура. 21. Понятие и классификация издержек. Бухгалтерские и экономические издержки. Постоянные и переменные издержки. Общие, средние и предельные издержки, их динамика. 22. Понятие предложения. Зависимость предложения от ценовых и неценовых факторов. 23. Понятие рационального потребителя. Понятие общей и предельной полезности. Правило максимизации полезности потребителем. 24. Понятие совокупного предложения. Кривая совокупного предложения. Неценовые факторы совокупного предложения. 25. Понятие совокупного спроса. Кривая совокупного спроса. Неценовые факторы совокупного спроса. 26. Понятие спроса. Зависимость спроса от ценовых и неценовых факторов. 27. Понятие финансов и их функции. Структура финансовой системы. 28. Понятие эластичности. Эластичность спроса по цене. Эластичность спроса по доходу. Перекрестная эластичность спроса. 29. Понятие эффективности. Экономическая и социальная эффективность 30. Понятие, элементы и уровни экономической системы. Критерии выделения экономических систем. 31. Потребности как предпосылки производства. Классификация потребностей. Закон возвышения потребностей. 32. Предмет и функции экономической теории. 33. Предпринимательство как фактор производства. Проблемы развития предпринимательства в Республике Беларусь. 34. Причины инфляции. Формы инфляции. 35. Республика Беларусь в системе мирохозяйственных связей. 36. Ресурсы (факторы) производства. Проблема выбора в экономике. 37. Рынок: понятие и функции. Рыночная система и ее эволюция. 38. Собственность: понятие и эволюция. Формы и виды собственности. 39. Сущность денег. Функции денег. 40. Сущность труда. Общественное разделение труда и кооперация труда. 41. Типология современных экономических систем: традиционная экономика, классический капитализм, административно-командная экономика, смешанная экономика. 42. Труд, земля и капитал – основные факторы производства. 43. Характер отношений между хозяйствующими субъектами: пропорциональность и конкуренция. 44. Эластичность предложения. Факторы эластичности предложения.
ЗАДАНИЕ НА КУРСОВОЙ ПРОЕКТ
3. Исходные данные для курсового проектирования: Номер варианта 4 B = 1 N = 4 Данные: - мощность двигателя, кВт
- ток якоря двигателя, номинальный, А
- скорость вращения двигателя номинальная, об/мин:
- сопротивление якорной цепи двигателя, Ом
- индуктивность якорной цепи, Гн
- момент инерции системы электропривода, приведенный к якорю двигателя, кг·м2
- постоянная времени компрессора, с
- диапазон регулирования скоростей:
- статическая ошибка регулирования, %
- допускаемое перерегулирование, %
- время регулирования, с
Параметры системы, одинаковые для всех вариантов: - напряжение якоря двигателя номинальное, В
- коэффициент передачи тахогенератора, Вс/рад
- коэффициент усиления усилительного устройства
- коэффициент передачи компрессора
Введение Современная теория автоматического регулирования является основной частью теории управления. Система автоматического регулирования состоит из регулируемого объекта и элементов управления, которые воздействуют на объект при изменении одной или нескольких регулируемых переменных. Под влиянием входных сигналов (управления или возмущения) изменяются регулируемые переменные. Цель регулирования заключается в формировании таких законов, при которых выходные регулируемые переменные мало отличались от требуемых значений. Целью курсового проекта является разработка автоматической системы регулирования (САР), которая обеспечивает плавное регулирование в заданном диапазоне скорости вращения электродвигателя, работающего на нагрузку, которая в данном случае представляет собой рабочий орган машины. Требования к качеству регулирования определяются заданием в соответствии с вариантом. Упрощенная принципиальная схема системы показана на рисунке 1.1
Д - двигатель; ТГ - тахогенератор; РС - регулятор скорости; ОВ - обмотка возбуждения; УУ - устройство усиления. Нагрузка присоединена к валу двигателя и на схеме не показана.
Рисунок 1.1 – Принципиальная схема системы автоматического регулирования скорости электропривода
1 Расчет и исследование исходной системы автоматического регулирования скорости электропривода 1.1 Разработка структурной схемы автоматической системы В соответствии с рисунком 1.1 разрабатываемую систему автоматического регулирования (САР) можно разбить на пять звеньев: электродвигатель, усилительное устройство, тахогенератор, регулятор скорости и компрессор (рисунок 1.2).
Рисунок 1.2 – Разрабатываемая структурная схема автоматической системы Однако следует иметь в виду, что динамические звенья не полностью соответствуют конструктивным элементам автоматической системы. Так, при расчете электромеханической постоянной времени учитывается момент инерции не только якоря двигателя, но и момент инерции всех вращающихся конструктивных элементов, соединенных с валом двигателя и приведенных к якорю. Для расчетов номинальная скорость вращения двигателя:
Коэффициент передачи электродвигателя по каналу "напряжение якоря - скорость вращения" определяется как:
Электомагнитная постоянная времени якорной цепи двигателя равна:
Электромеханическая постоянная времени двигателя:
При
где постоянные времени
Так как устройство усиления имеет инерционность, которая пренебрежимо мала в сравнении с инерционностями остальных элементов САР, то его передаточная функция может быть, принята как:
где Передаточная функция компрессора
где На основании полученных передаточных функций строится структурная схема САР, представленная на рисунке 1.3.
Рисунок 1.3 структурная схема САР
1.2 Статический расчет системы Относительное отклонение регулируемой величины в разомкнутой системе, вызванное изменение ее нагрузки от нуля до номинальной
Требуемый коэффициент передачи системы по условию обеспечения заданной статической точности регулирования скорости в требуемом диапазоне её изменения
Требуемый коэффициент передачи регулятора (коэффициент усиления корректирующего устройства вместе с промежуточным усилителем) определяется по формуле
1.3 Исследование устойчивости системы На основании полученной структурной схемы передаточная функция разомкнутой автоматической системы без коррекции её динамических свойств при
На основании выражения (1.13) передаточная функция замкнутой автоматической системы с единичной отрицательной обратной связью будет иметь вид:
1.3.1 Определение устойчивости исходной разомкнутой САР скорости электропривода с использование логарифмических частотных характеристик (ЛЧХ) Построим асимптотическую логарифмической амплитудно-частотной характеристики (ЛАЧХ) разомкнутой исходной разомкнутой САР скорости электропривода в соответствии с выражением:
Для построения асимптотической ЛАЧХ разомкнутой исходной САР требуется определить длины сопрягающих частот. Затем нужно построить ЛАЧХ со следующими наклонами: 0, -1, -2, -3, (0, -20 дБ/дек, -40 дБ/дек, -60 дБ/дек). Определение длины сопрягающих частот в миллиметрах:
где: lдек - длина декады, мм; lωi – длина частоты, мм; ωiн – начальная частота декады, с-1. Для нашего случая примем lдек =100 (мм), ωiн = 0,1 (с-1). Полученные данные заносятся в таблицу 1.1
Таблица 1.1 - Данные для построения ЛАЧХ
Требуемый коэффициент передачи:
Таким образом, на частотах от 0 до w 1 ЛАЧХ (приложение 1, рисунок 1) имеет нулевой наклон на уровне Для построения асимптотической ФЧХ (приложение 1, рисунок 2) используем построенную ЛАЧХ по следующему правилу: где наклон ЛАЧХ равен 0 – фаза равна 0°, а при каждом изменении наклона на единицу фаза соответственно меняется на π/2. Математически полученная ФЧХ описывается следующей формулой:
В соответствии с выражение (1.18) заполним таблицу 1.2. Таблица 1.2 – Данные для построения ФЧХ
По построенным частотным характеристикам определим, как располагается частота wπ относительно частоты ωср По ЛАЧХ можно убедиться, что частота среза wcр лежит левее частоты wπ следовательно исходная САР скорости электропривода является устойчивой.
1.3.2 Исследование устойчивости исходной замкнутой САР скорости электропривода с использование критерия Гурвица
При анализе автоматической системы на устойчивость могут быть использованы различные критерии устойчивости. Применим критерии устойчивости Гурвица. Для оценки устойчивости по критерию Гурвица необходимо характеристическое уравнение автоматической системы, которая исследуется на устойчивость.
где
и из его коэффициентов составим главный определитель матрицы Гурвица:
Критерий можно сформулировать так: система устойчива, если при
Это необходимое и достаточное условие устойчивости системы выполняется, следовательно, исходная система устойчива. Запишем условие устойчивости замкнутой САР:
Исходя из условия устойчивости (1.18), определим предельный коэффициент усиления, при котором система окажется на границе колебательной устойчивости:
1.4 Временной анализ исходной системы автоматического регулирования скорости электропривода Составим и исследуем модель исходной системы автоматического регулирования: На рисунке 1.4 представлена имитационная модель временного анализа исходной системы автоматического регулирования.
Рисунок 1.4 – Имитационная модель временного анализа исходной системы Результаты моделирования исходной системы автоматического регулирования представлены на рисунке 1.5
Временные показатели качества: 1) перерегулирование – σ мод = 21.3% в соответствии с рисуноком; 2)время достижения 1 –го максимума: tу max мод = 0.105 (с); 3)время нарастания: tнмод = 0.0438 (с); 4)время регулирования: tpмод = 0.235 (с); 5)установившееся значение: hумод = 0.997; 6)время установившегося значения: tумод =0.35 (с); 7) показатель точности регулирования - статическая ошибка желаемой системы: ε мод = 0.00333; 8) количество максимумов за время регулирования: n = 1.
1.5 Частотный анализ разомкнутой исходной системы автоматического регулирования скорости электропривода
Модель частотного анализа системы автоматического регулирования приведена на рисунке 1.7.
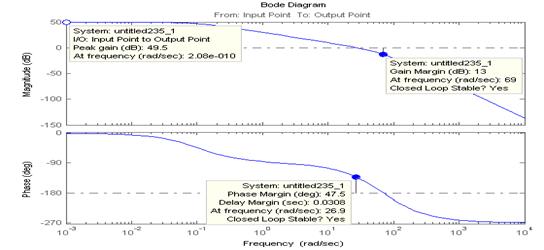
Рисунок 1.7 Имитационная модель частотного анализа исходной разомкнутой системы Результаты моделирования исходной разомкнутой системы автоматического регулирования представлены на рисунке 1.8, 1.9.
Рисунок 1.8 АЧХ и ФЧХ исходной разомкнутой системы
Рисунок 1.9 Амплитуднофазочастотная характеристика (АФЧХ) исходной разомкнутой системы. Частотные показатели качества разомкнутой системы автоматического регулирования: 1) Запас устойчивости по амплитуде / Hm / мод = 13 (дБ); 2) Частота среза ωср мод =26.9 (с–1); 3) Запас устойчивости по фазе Δ jмод (ωср) = 47.5°; 4) Частота ωπ мод =69 (с– 1); 1.6 Частотный анализ замкнутой исходной системы автоматического регулирования Модель частотного анализа замкнутой системы автоматического регулирования приведена на рисунке 1.10.
Рисунок 1.10 Имитационная модель частотного анализа исходной замкнутой системы
Рисунок 1.11. АЧХ и ФЧХ исходной замкнутой системы
Рисунок 1.12. АФЧХ исходной замкнутой САР
Частотные показатели качества замкнутой САР: 1) начальная частота ω;0 мод = 1.03 (c-1 ); 2) начальная амплитуда A 0 мод (0)=0.997; 3) резонансная частота ωрез мод = 29.8 (c-1); 4) амплитуда при ωрез мод: Арез мод (ωре з)=1.25; 5) амплитуда полосы пропускания: Апр мод (ωпр) = 0.707 А 0 мод (ω;0)=0.707·0.997 = 0.704; 6) частота полосы пропускания ωпр мод = 46.6 (с-1); 7) минимальная амплитуда при максимальной частоте: ωma x= 9.9·103 (с-1): Аmin мод (ωma x)=7.1·10-6; 8) показатель колебательности: Mмод= Арез мод (ωре з) / A 0 мод (ω;0) = 1.25/0.997=1.25 (1.24)
1.7 Связь временных показателей качества исходной системы автоматического регулирования скорости электропривода с частотными показателями качества Прогнозирование временных показателей качества работы САР:
1) Перерегулирование:
Условие (1.25) не выполняется т.к.
2) Время регулирования:
Условие (1.26) не выполняется т.к.
3) Время достижения первого максимума:
Условие (1.28) выполняется
4) Показатель точности регулирования:
ε мод = 0.00333
Условие (1.30) выполняется т.к.
Прогнозирование частотных показателей качества работы САР:
1) Запас по фазе:
Условие (1.32) не выполняется. 2) Частота среза: (формулу переделать)
3) Запас устойчивости по амплитуде:
где
Прогнозирование частотных показателей качества работы замкнутой САР:
1) Показатель колебательность:
2) Запас по фазе:
где
Вывод: исходя из того что условия (1.25), (1.32), (1.36), (1.38) и (1.39) не выполняются можно сделать вывод о том, что исходная САР неустойчивая.
2.1 Синтез САР состоящей из функционально необходимых элементов в приложении Control System Toolbox В курсовой работе используем последовательный тип корректирующего устройства. В качестве модели для загрузки в рабочую область MATLAB используем имитационную модель исходной разомкнутой САР (рисунок 2.3)
Рисунок 2.2 – Переходный процесс в системе, состоящей из функционально необходимых элементов Как видно из графика переходного процесса, исходная система не отвечает временным показателям качества (выражения (1.25 – 1.30)). Если ввести корректирующее звено пропорционального типа, то сколь-нибудь существенно улучшить динамические свойства системы не удастся (при заданной структуре компенсатора нули и полюсы можно передвигать непосредственно на графике при помощи мыши; при этом соответственно изменяется значение коэффициента усиления компенсатора в поле Gain). Поэтому применим компенсатор инерционно-форсирующего типа, добавив два полюса и два нуля с помощью кнопок с обозначением крестика и кружочка, расположенных над графическим окном слева и, разместив при этом (с помощью мыши) нули и полюсы. В результате исследования САР скорости электропривода в приложении Control System Toolbox методом корневых годографов (рисунок 2.3) была получена передаточная функция корректирующего устройства:
где
Как видно из графика переходного процесса(рисунок 2.4), скорректированная система отвечает временным показателям качества (выражения (1.25 – 1.30)).
2.2 Временной анализ скорректированной САР Составим и исследуем модель скорректированной системы автоматического регулирования: На рисунке 2.5 представлена имитационная модель временного анализа скорректированной системы автоматического регулирования.
Рисунок 2.5 – Имитационная модель временного анализа скорректированной системы
Результаты моделирования скорректированной системы автоматического регулирования представлены на рисунке 2.6
Рисунок 2.7 Статическая ошибка скорректированной системы (сигнал рассогласования) Временные показатели качества: 1)перерегулирование – σ мод = 0% в соответствии с рисуноком; 2)время достижения 1 –го максимума: tу max мод = 0.0836(с); 3)время нарастания: tнмод = 0.0666 (с); 4)время регулирования: tpмод = 0.137 (с); 5)установившееся значение: hумод = 0.997; 6)время установившегося значения: tумод =0.25 (с); 7)показатель точности регулирования - статическая ошибка желаемой системы: ε мод = 0.00333; 8)количество максимумов за время регулирования: n = 1.
|


















 (рад/с). (1.1)
(рад/с). (1.1) (1.2)
(1.2) (1.3)
(1.3) (1.4)
(1.4) электродвигатель можно представить как апериодическое звено второго порядка:
электродвигатель можно представить как апериодическое звено второго порядка: (1.5)
(1.5) и
и  вычисляются по формулам:
вычисляются по формулам: , (1.6)
, (1.6) (1.7)
(1.7) , (1.8)
, (1.8) берется исходя из задания.
берется исходя из задания. , (1.9)
, (1.9) и
и  берутся из задания на курсовое проектирование.
берутся из задания на курсовое проектирование.
 . (1.10)
. (1.10) (1.11)
(1.11) . (1.12)
. (1.12)
 (1.13)
(1.13) (1.14)
(1.14)

 , (1.15)
, (1.15) , (1.16)
, (1.16) (
( ) (1.17)
) (1.17) (1.18)
(1.18) , °
, °
 (1.19)
(1.19)




 . (1.20)
. (1.20) положительны и п определителей Гурвица, получаемых из (1.16), т.е. для системы третьего порядка:
положительны и п определителей Гурвица, получаемых из (1.16), т.е. для системы третьего порядка: ,
,  ; (1.21)
; (1.21) .
. ,
, ,
,

 (1.22)
(1.22) (1.23)
(1.23)







 . (1.25)
. (1.25) %,
%, %,
%, .
. . (1.26)
. (1.26) (с),
(с), (с).
(с). .
. , (1.27)
, (1.27) (с). (1.28)
(с). (1.28) = 0.01, (1.29)
= 0.01, (1.29) , (1.30)
, (1.30)
 , (1.31)
, (1.31) , (1.32)
, (1.32)
 , (1.33)
, (1.33) . (1.34)
. (1.34) (с -1) – условие (1.34) выполняется.
(с -1) – условие (1.34) выполняется. (1.35)
(1.35)
 . (1.36)
. (1.36) – условие (1.36) не выполняется.
– условие (1.36) не выполняется. , (1.37)
, (1.37) . (1.38)
. (1.38) – условие (1.38) не выполняется.
– условие (1.38) не выполняется. , (1.39)
, (1.39) ;
; – условие (1.39) не выполняется.
– условие (1.39) не выполняется. Рисунок2.1 – Имитационная модель исходной разомкнутой САР скорости электропривода
Рисунок2.1 – Имитационная модель исходной разомкнутой САР скорости электропривода

 ;
;  − нули передаточной функции корректирующего устройства;
− нули передаточной функции корректирующего устройства; ;
;  − полюса передаточной функции корректирующего устройства;
− полюса передаточной функции корректирующего устройства; .
.


 Рисунок 2.6 График переходного процесса скорректированной системы
Рисунок 2.6 График переходного процесса скорректированной системы



