
Характеристики асинхронных двигателейОформите докладную записку на угловом бланке: ОТДЕЛ НОВЫХ ПРОЕКТОВ. ДОКЛАДНАЯ ЗАПИСКА. 10 марта 2011 года № 35. Генеральному директору агентства И.Л.Петрову. О необходимости увеличения штатной численности отдела. В настоящее время для успешной работы нашего агентства необходимо увеличение базы данных о потенциальных клиентах. Одним из наиболее возможных путей ее расширения является постоянный анализ средств массовой информации, в частности прессы. В связи с тем, что отдел в составе из 5 сотрудников, не имеет возможности организовать подробное изучение аналитических изданий, считаю целесообразным ввести в штат отдела две должности менеджеров для изучения и анализа прессы с целью выявления потенциальных клиентов, а также подготовки оперативной информации о положении на рынке СМИ в форме еженедельных отчетов. Сотрудников на эти должности предлагаю подобрать их числа студентов 4-5 курсов факультета журналистики МГУ или Школы рекламы. Руководитель отдела И.А.Чернышева.
Характеристики асинхронных двигателей Статические и динамические характеристики асинхронных и синхронных двигателей различны. При рассмотрении устойчивости работы обоих типов двигателя используют зависимость электрической мощности потребляемой двигателем в зависимости от величины скольжения. Рисунок 1
На рисунке 1 изображена электрическая мощность, потребляемая асинхронным двигателем, в зависимости от величины скорости изменения скольжения. Если скорость изменения скольжения мала, то при анализе режима двигателя приближенно можно получать динамические характеристики (ds/dt><0) на основе ряда статических характеристик (ds/dt=0). Запишем количественные соотношения между параметрами режима на основе схемы замещения асинхронного двигателя. Для упрощения пренебрегаем активным сопротивлением цепи статора. Рисунок 2
Где ХS – суммарное сопротивление рассеяния обмоток статора и ротора; Хµ - сопротивления намагничивания статора; R2 - приведенное сопротивление ротора и статора. Активная мощность, потребляемая нагрузкой, т. е. вращающий момент двигателя определяется мощностью машин приводимых во вращение и их характеристиками. Ммех= f(ω) Для упрощения примем, что механическая мощность не зависит от скольжения. Тогда, можно записать следующее соотношение:
Активная мощность как функция напряжения скольжения находится из схемы замещения следующим образом:
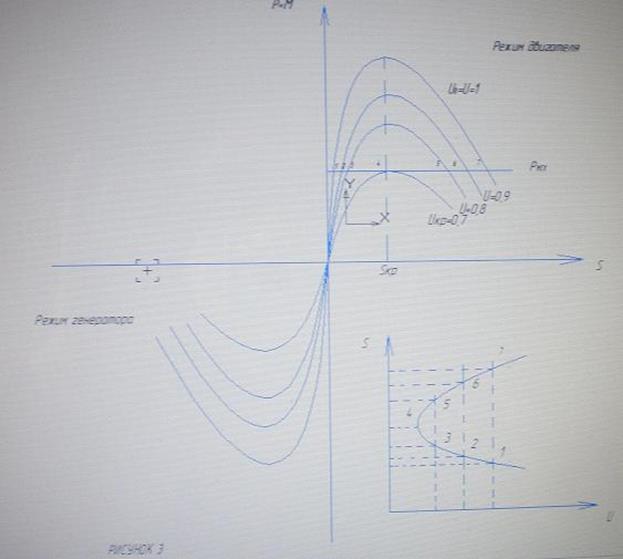
Рисунок 3
На рисунке 3 изображена зависимость между мощностью, напряжением и скольжением. При данной механической нагрузке Рмех, у каждого двигателя есть определенный критический режим. Напряжение Uкр и скольжение Sкр, при котором этот режим наступает, называют критическими. Максимальный момент, который может развивать двигатель в критическом режиме, равен механическому моменту рабочей машины. При дальнейшем понижении напряжения работа невозможна, поскольку электрический момент оказывается меньше механического момента. Значение максимального момента и критического скольжения можно определить, продифференцировав выражение мощности по скольжению и приравняв нулю:
“- ” – режим генератора; “ +” – режим двигателя. При этом скольжении находим значение максимальной мощности, т.е подставляем
Величина критического скольжения определяется через номинальное скольжение S0 и кратность максимального момента b0:
Значение S0 в основном зависит от мощности двигателя. Для малой мощности (несколько кВт) она составляет 5 %, при средней мощности S0 = 2% и у очень крупных двигателей (сотни кВт) уменьшается до 1 %. Используя понятия Sкр и Pmax, перепишем выражения для мощности, которыми часто пользуются при расчетах электрических приводов:
Работа двигателя при положительном значении В нормальных условиях двигатель работает на устойчивой части своей характеристики, при значении S< SKP. Однако, при снижении напряжения или увеличении механического вращающего момента, двигатель может оказаться в критическом режиме. При дальнейшем снижении напряжения, точка, характеризующая режим, перейдет на спадающую часть характеристики, двигатель тормозится, ток и реактивная мощность резко растут, а затем двигатель останавливается или опрокидывается. Обычно двигатели работают с большим запасом устойчивости. Их рабочее скольжение значительно меньше критического, а максимальный вращающий момент много больше рабочего (50-70%). В этих условиях, колебания напряжения не опасны с точки зрения устойчивости двигателей, и только очень большие снижения напряжения на их шинах (20-40%) приводят к опрокидыванию двигателей.
|
 Это обусловлено появлением свободных токов при быстром изменении скольжения (
Это обусловлено появлением свободных токов при быстром изменении скольжения ( , где S=
, где S=  ). У асинхронных двигателей скольжение отлично от нуля, а у синхронных равно нулю.
). У асинхронных двигателей скольжение отлично от нуля, а у синхронных равно нулю.



 .
. в формулу активной мощности и получаем:
в формулу активной мощности и получаем: .
. ;
; .
. .
. (точки 1,2,3) устойчива, при отрицательном
(точки 1,2,3) устойчива, при отрицательном 


