МЕТОДИ І ЗАСОБИ СТВОРЕННЯ СИЛОВИХ НАВАНТАЖЕНЬ.2.1. Способи випробування конструкцій. 2.2.Випробування конструкцій статичним навантаженням. 2.3.Випробування конструкцій динамічним навантаженням.
Література: [1], 116-127,176-184; [2], стор.29-32, 44-46, 54-68.
2.1. Залежно від виду навантаження розрізняють два основні способи випробувань: статичне (під статичним навантаженням) і динамічне (під динамічним). За величиною навантаження розрізняють два види випробувань: експлуатаційне та руйнівне. Вибір того або іншого навантаження залежить від поставленої мети. У лабораторних умовах розрізняють натурне випробування, коли досліджується об¢єкт виготовлений в натуральну величину, і випробування моделі. Щодо точності отриманих результатів необхідно віддати перевагу натурним випробуванням, оскільки під час переводу результатів випробування моделі до дійсних розмірів конструкції можуть виникнути деякі похибки. Під час випробувань до досліджуваного об¢єкта прикладається статичне або динамічне навантаження. Вибір навантаження, його схема і порядок - важливий етап підготовки експерименту, оскільки від нього залежать працевитрати, можливість виникнення найбільш несприятливого напружено-деформованого стану конструкції.
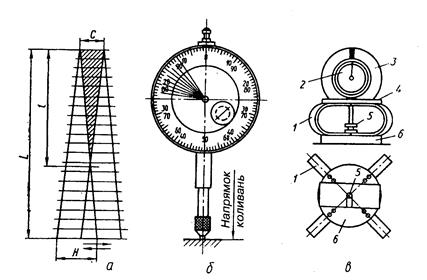
2.2. Статичне навантаження може створюватися власною вагою якогось матеріалу (пісок, вода), штучними вантажами (в ролі штучних вантажів використовують гирі, металеві відливки й поковки, бетонні та залізобетонні блоки, які перед випробуванням зважують та маркують) або тиском спеціального обладнання (домкрати, камери зі стисненим повітрям). Для зручності та точності створення навантажень необхідні такі вимоги: короткий період навантаження та розвантаження; простота та легкість цих процесів; швидкість та точність визначення під час випробування. Навантаження визначається вагою вантажу, що використовується: при навантаженні водою - масою води; під стисненим повітрям - тиском повітря, що фіксує манометр; при навантаженні гідродомкратами - тиском масла в системі, який вимірює манометр. Ефективний спосіб визначення зовнішнього навантаження - встановлення динамометрів стиснення або розтягу між досліджуваною конструкцією та навантаженням. Динамометри (рис.46) можуть бути механічними або електромеханічними. Механічні побудовані на залежності між зусиллям та деформацією пружини. Деформація пружини перетворюється в кутове переміщення стрілки циферблата індикатора годинникового типу. Електромеханічні динамометри складаються з пружного сталевого стрижня, на який наклеєний тензорезистор. Відлік інформації ведеться за допомогою будь-якого реєструвального тензометричного приладу.
Рис. 46. Динамометри: а - динамометри розтягу; б - зразковий динамометр Токаря Н.Г.; в - динамометри стику; г - електромеханічні динамометри; 1 - серга; 2 - шкала; 3 - пружна замкнута рама; 4 - індикатор; 5 - пружний елемент; 6 - тензорезистори
В лабораторних умовах під час випробування моделей чи зразків матеріалів використовують стандартне пресове обладнання та розривні машини, що поділяються на два типи: машини з жорстким навантаженням, у яких задається режим деформування, і машини з м¢яким навантаженням, де задається закон зміни силового навантаження. Останній тип машин вважається за кращий. В натурних експериментах конструкцій зосереджені навантаження найпростіше створити підвішуванням вантажів, при цьому діюче навантаження не залежить від прогину конструкції, однак цей спосіб досить громіздкий. Запропонована схема не є безпечною, оскільки дослідник вимушений знаходитися під навантаженою конструкцією. Для прикладання зосереджених навантажень раціональніший спосіб натягу. При використанні натяжних пристроїв немає потреби зважувати і переміщувати вантаж; напрям прикладених зусиль може бути довільним; необхідне обладнання досить компактне; можлива швидка зміна рівня навантаження; регульоване зняття навантаження.
Рис. 47. Спосіб підвішування вантажу: 1 - ферма; 2 - підвіска; 3 - вантаж
Рис. 48. Спосіб натягу: 1 - ферма; 2 - підвіска; 3 - динамометр; 4 - блок; 5 - агрегат
Для цього в ланцюг натяжного пристрою можна ввести динамометр, що фіксує величину навантаження. Недоліками методу є необхідність у випадку одночасного прикладання декількох навантажень постійно регулювати зусилля, чутливість навантаження до розвитку пластичних деформацій у конструкції під довготривалим навантаженням. Однак цих недоліків можна позбутися під час автоматизованого контролю за допомогою мікропроцесорної техніки. Системи з натяжними пристроями за принципом роботи є механізмами з жорстким завантаженням, а з підвішеними вантажами - з м¢яким навантаженням. За схемою рис. 48 можна імітувати розподілене навантаження, використовуючи зосереджене. Щоб забезпечити 10%-у похибку за моментами в середині прольоту при рівномірно розподіленому навантаженні, його можна замінити трьома зосередженими силами. Забезпечення 5%-ї похибки вимагає прикладання чотирьох зосереджених сил по всій довжині прольоту. Досить часто навантаження створюють гідравлічними домкратами. У вітчизняній практиці широко використовують вантажні домкрати ДГ-200, ДГ-100, ДГ-50.
Рис.49. Схема гідравлічного домкрата ДГ-100м: 1 - циліндр; 2 - штуцер для шланга; 3 - манжети; 4 - складний плунжер; 5, 6 - отвори для виходу повітря; 7 - обмежувальна гайка; 8 - сферична опора; 9, 12 - робочі порожнини; 10 - нерухомий поршень; 11 - порожнистий шток
Метод створення зусиль гідравлічними домкратами є найбільш індустріальним. Але, як правило, потребує силової підлоги (силова підлога це потужна залізобетонна плита, у верхній частині якої урівень з поверхнею встановлені шини, надійно заанкеровані у тілі бетону. Шини можуть бути виконані у вигляді металевої коробки з прорізом. У проріз вставляються болти, до яких кріпиться об¢єкт, що випробовується і силове обладнання). Він вигідно відрізняється малогабаритністю, простотою створення і регулювання зусиль, можливістю прикладання їх у будь-якому напрямі. На практиці використовують гідравлічні домкрати, які можуть створювати навантаження до 1000 кН та групові насосні установки з електричним або (при невеликих навантаженнях) ручним приводом. У проектному положенні найчастіше випробування проводять з використанням штучних вантажів (рис. 50, в). При цьому можна створити довільний закон розподілу навантаження по площі конструкції. Однак ширина кожного стовпчика не повинна перевищувати 1/6 прольоту конструкції, що випробовується, між стовпчиками повинен бути зазор не менше ніж 50 мм. При випробуванні конструкцій з горизонтальною поверхнею та рівномірним розподілом навантаження як вантаж можна використовувати воду (рис. 50, е). Цей спосіб має ряд переваг: рівномірність прикладання і можливість точного визначення навантаження, плавність завантаження та розвантаження. Недоліком є те, що випробування таким способом можна проводити лише при температурі віще 0°С. Рівномірно розподілене навантаження можна створити за допомогою тиску повітря (рис. 50, г). Для цього на поверхню конструкції вкладаються повітронепроникні мішки, які поміщують в парусинові чохли. Над мішком створюється жорсткий навіс, а потім за допомогою стисненого повітря в мішках створюється необхідний тиск.
Рис. 50. Способи створення статичного навантаження: а, б - випробування ферми; в - навантаження балки штучними вантажами; г - навантаження повітряною або водяною ємністю; д - випробування балки на стаціонарному стенді з силовою підлогою; е -навантаження водою, яка розміщена в ємність із дерев¢яних щитів з водонепроникною плівкою; 1 - конструкція, що випробовується; 2 - домкрат; 3 - тяги; 4 - балка; 5 - стояки; 6 - штучні вантажі; 7 - підставки; 8- камера із резини; 9 - швелери; 10 - силова підлога; 11 - водонепроникна плівка; 12- дерев¢яні щити
Випробування конструкцій проводять на спеціальних стендах. Вони можуть бути стаціонарними та тимчасовими. Стенди повинні мати опори для конструкцій, що випробовуються, і для домкратів, а також облаштування для кріплення вимірювальних приладів. На рис. 51-53 представлені можливі варіанти випробування кроквяних балок з різними способами завантаження. 2.3. На конструкцію під час експлуатації діють динамічні навантаження, тобто такі, в яких міняється або величина або точка прикладання. Розрізняють три основні види динамічних навантажень: - нерухоме вібраційне, що прикладене в одній точці. Воно виникає в результаті роботи різних механізмів з неврівноваженими масами; - ударне в якійсь визначеній точці. Таке навантаження може виникати при падінні різних тіл, під час роботи копра, молота тощо; - рухоме вібродинамічне, що являє собою комбінацію вищезгаданих двох видів, точка прикладання якого міняється.
Рис.51. Випробування кроквяної балки за допомогою динамометру з натяжним пристроєм: 1 - досліджувана конструкція; 2 - опорні траверси по верхньому поясу; 3 - плити покриття; 4 - тяги; 5 - траверси; 6 - вантаж, від ваги якого в балці виникають контрольні зусилля; 7 - динамометр розтягу з натяжним пристроєм; 8 - страхувальні пристрої
Рис. 52. Випробування кроквяної балки підвішуванням платформ із вантажами: 1 - балка; 2 - опорні траверси по верхньому поясу; 3 - плити покриття; 4 - підвіски із арматурної сталі; 5 - платформи для вантажів; 6 - нерухома опора для платформи; 7 - блоки для страхування; 8 - штучні вантажі; 9 - пристрої для страхування
Рис. 53. Випробування кроквяної балки гідродомкратами: 1 - дослідна конструкція; 2 - опорні траверси по верхньому поясу; 3 - плити покриття; 4 - тяжі; 5 - траверси; 6 - анкерні пристрої (блоки, фундаменти під обладнання, гвинтові палі); 7 - гідродомкрати з насосною станцією; 8 - пристрої для страхування
Динамічні випробування характеризуються досить швидкою зміною інтенсивності зовнішніх навантажень в часі або просторі, при цьому виникають сили інерції. Під час динамічних випробувань визначають параметри, що оцінюють напружено-деформований стан конструкції: амплітуду, частоту, швидкість коливань, їх затухання, а також деформацію. На рис. 54 показані способи створення динамічної дії на конструкції. Найбільш часто використовують ударне або вібраційне навантаження. Ударне навантаження можна створити вільним падінням вантажу на конструкцію. Однак при цьому вантаж разом з конструкцією приходить у коливальний рух і впливає на частоту власних коливань останньої. Цього недоліку позбавлена схема, коли вантаж підвішений до конструкції. Його в потрібний момент миттєво знімають. Звільнена від навантаження конструкція починає вільно коливатись. Недоліком такої схеми є те, що необхідно збільшувати вагу вантажу. В практиці є випадки, коли виникає потреба у горизонтальних ударних навантаженнях. Тут можна використовувати стандартну установку - копер. В останній час для цього почали застосовувати піропатрони невеликої потужності. Для створення і передачі конструкції різних за напрямком, частотою та амплітудою вимушених коливань, а також моменту змінної величини і напряму використовують спеціальну установку - вібромашину.
Рис. 54. Способи створення динамічної дії: а - таран; б - скидання вантажу (горизонтальне навантаження); в - скидання вантажу на конструкцію (вертикальне навантаження); г, д - зворотній удар-обрив відтяжки; е - вібродомкрат; є - вібромашина: 1 - конструкція, що випробовується; 2 - підвіска; 3 -вантаж; 4 - пісок; 5 - місце обриву в відтяжці; 6 - анкер; 7 - масло; 8 - плунжерний барабан; 9 - гідропульсатор; 10 - маси з ексцентриками, що обертаються; 11 - станина
Вібромашина складається з парної кількості дисків з дзеркально розташованими неврівноваженими масами, що обертаються в різні боки. Обертання здійснюється електродвигуном, кількість обертів якого і, відповідно, частота вимушених коливань конструкції міняються у широких межах. Під час обертання дисків виникають відцентрові сили, які можна розкласти на вертикальну і горизонтальну складові. Горизонтальні в будь-який момент часу напрямлені в протилежні боки і взаємно врівноважуються. Вертикальні додаються і створюють пульсуючу силу, величина якої змінюється за законом синуса. Вібромашина такої конструкції може створювати навантаження від нуля до Р. Регулювати вібраційну силу, створювану машиною, можна змінюючи неврівноважені маси та радіус їх кріплення на дисках.
3.1. Прилади для вимірювання лінійних переміщень. Геодезичні методи вимірювання лінійних переміщень. Визначення кутових переміщень.
Література: [1], стор. 32-44; [2], стор. 100-107.
Статичні випробування характеризуються дуже повільною зміною інтенсивності зовнішнього навантаження в часі і просторі без урахування сил інерції. Тут встановлюють параметри напружено-деформованого стану конструкції для визначення деформацій, переміщень, напружень, моменту утворення і величини розкриття тріщин, форми і характеру вичерпання міцності. Для вимірювання цих параметрів застосовують механічні, електромеханічні й електричні прилади. Найбільш точними, що вимірюють параметри в багатьох точках, дистанційно, автоматично та з мінімальними затратами, вважають електричні. Вони дозволяють повністю автоматизувати процес випробування, здійснити обробку та аналіз результатів за допомогою сучасної комп¢ютерної техніки. Механічні прилади менш точні, під час їх використання неможливо дистанційно знімати покази вимірів, їх застосування вимагає додаткових заходів з техніки безпеки, процес випробування більш довготривалий і трудомісткий. Але іноді, особливо за необхідності швидкого отримання експериментальних даних, механічні прилади успішно застосовують у практиці.
3.1. Вимірювання відносного переміщення фіксованих точок на поверхні конструкції або переміщення точок відносно нерухомої основи може проводитися механічними приладами. Механічний тензометр - це прилад, який базується на принципі нерівноплечого важеля для збільшення невеликих деформацій верхнього шару досліджуваного елементу до видимих неозброєним оком переміщень стрілки. Найбільш широко використовуються у практиці прилади системи Гугенбергера. Тензометр вимірює деформацію фібрового волокна елемента, довжина якого дорівнює l між призмою і конусом. Під час деформації цього волокна в межах баз ±Dl призма і вертикальний важіль у разі розтягу елемента повертається справа наліво, при стиску - зліва направо. Рух через горизонтальний важіль передається на стрілку. Вимірювану деформацію при цьому розраховують так
де База тензометра може мінятись у межах 20...250 мм за допомогою спеціального подовжувача.
Рис. 55. Схема механічного тензометра: 1 - конус; 2 - призма; 3 - важіль вертикальний; 4 - важіль горизонтальний; 5 - шкала; 6 - стрілка
Дещо точніший електромеханічний тензометр, в якому горизонтальний важіль та стрілка зі шкалою замінені на мікрометричний гвинт з електроконтактною схемою сигналізації.
Рис. 56. Схема електромеханічного тензометра: 1 - конус; 2 - призма; 3 - важіль вертикальний; 4 - гвинт мікрометричний; 5 - пластина контактна; 6 - індикатор; 7 - джерело живлення
Після закріплення тензометра на досліджуваному об¢єкті початкове положення призми фіксують за допомогою контактної системи. Електричне коло замкнуте через контактну пластину та вертикальний важіль, індикатор фіксує струм у колі. Обертаючи мікрометричний гвинт, фіксуємо момент розмикання кола та робимо відлік початкового положення призми тензометра. Після навантаження конструкції призма переміститься і важіль займе відповідне положення, перемістивши в горизонтальному напрямі контактну пластину. Обертаючи гвинт до моменту, коли електричне коло розімкнеться, знімаємо показник гвинта мікрометричного, який відповідає кінцевому положенню призми. Різницю між початковим і кінцевим показниками гвинта позначаємо величиною а
У лабораторних умовах можливе вживання інших видів тензометрів. Оптико-механічні тензометри являють собою удосконалений механічний тензометр, в якому механічну систему важелів та стрілки замінено на дзеркально-оптичну, а функцію стрілки виконує світловий промінь. З урахуванням фізичної властивості сталевої струни під час розтягування міняти частоту власних коливань розроблено принцип струнного тензометра. За деформацією елемента змінюється і відстань між конусом та рухомою призмою тензометра, що в свою чергу змінює натяг струни, а відповідно і частоту її коливань. Струнний тензометр працює в двох режимах: збудження коливань і реєстрації частоти коливань. Спочатку до електромагніту підводять імпульс постійного струму: струна притягується до магніту і відпускається, тобто збуджуються вільні коливання. Потім електромагніт переключається на вхід підсилювача і працює як індукційний перетворювач. При цьому вихідним параметром є не амплітуда, а частота. Ця особливість забезпечує високу завадостійкість сигналу і передачу його без спотворень на далеку відстань. Область використання струнних тензометрів - довготривалі вимірювання деформацій..
Рис. 57. Схема струнного тензометра: 1 - конус; 2 - рухома призма; 3 - електромагніт; 4 - струна; 5 - гвинт натягу струни
Таку ж саму функцію при довготривалих випробуваннях виконує механічний прилад - компаратор. Компаратори залежно від принципу роботи і конструктивної схеми бувають механічними і оптичними. Їх встановлюють на конструкцію лише в процесі зняття відліків. Принцип полягає в порівняні відстані між двома рисками або мітками на конструкції, нанесеними до та після навантаження. Різниця між ними і є величиною деформації. Деформації зсуву вимірюють зсувомірами. Зсувомір Аістова являє собою видозмінений тензометр Аістова і має три опорні точки. Нехай необхідно виміряти зсув між волокнами 1-1 та 2-2 елемента. На волокно 1-1 поміщують опору ”а”, а на волокно 2-2 опори “б” та “с” тензометра. Під час взаємного зсуву цих двох волокон опора “а” переміститься на Dd в точки “а¢” або в “а¢¢”. Тангенс кута зсуву
Рис. 58. Розрахункова схема зсувоміра
Для вимірювання лінійних зміщень широко використовують прогиноміри, які мають барабанно-шестерневий та рейково-шестерневий механізм. Барабанно-шестерневий механізм з дротяним зв¢язком - це прогиноміри систем Максимова (ПМ-2, ПМ-3), Аістова (ПАО-5, ПАО-6). Ємел¢янова, Гріо, Рішара та ін.
Рис. 59. Схема прогтноміра Аістова ПАО-6
Він складається із корпусу, циліндричного барабану, системи шестерен. Оберт барабану 7 викликає відхилення стрілки на шкалі 5 і за допомогою системи шестерен - обертання осей 3 і 4. Співвідношення зубів шестерен підібрано так, що один оберт барабана викликає 10 обертів осі 3 та 100 обертів осі 4. Ціна поділки відповідних шкал прогиноміра 1 см, 1 мм та 0,1 мм. Обертання барабану викликається переміщенням дротини діаметром 0,4 мм, що його огинає й один кінець якої прикріплюється до дослідної точки конструкції, а другий - до вантажу 6. Корпус прогиноміра прикріплюється на нерухомій опорі. Позитивна якість прогиномірів цього типу - їх “нескінченний” хід, відсутність обмежень на обертання стрілок усіх шкал. Ця обставина при періодичній реєстрації показників прогиноміра дозволяє вимірювати дуже великі переміщення і, крім того, запобігає пошкодженню приладу при обваленні об¢єкта, що досліджується. Рейково-шестерневі прогиноміри, або індикатори годинникового типу, використовують для вимірювання невеликих за величиною переміщень. Їх встановлюють на досліджувану конструкцію і впирають рухомим стержнем у якусь нерухому точку, не зв¢язану з конструкцією. Тому їх називають контактними. Контактні прогиноміри характеризуються порівняно високою точністю вимірювання деформацій (0,01 мм), невеликими габаритами та масою. Використовують індикатори ІЧ10, ІЧ25, ІЧ50 (цифра позначає верхню межу вимірювання в мм)
Рис. 60. Схема індикатора годинникового типу: 1 - шток з нарізкою зубів; 2 - система зубчастих коліс; 3 - пружина; 4 - стрілка; 5 - шкала
При вимірюванні лінійних переміщень застосовують геодезичні методи. Вертикальні переміщення досліджуваних точок визначають за допомогою нівелірів за заздалегідь установленими реперами або за допомогою підвісних рейок з міліметровою шкалою. Горизонтальні переміщення - знаходять за допомогою теодолітів. Недоліком геодезичних методів є те, що переміщення точок тієї частини споруди, що недоступні для спостереження з місця установки приладу, не можуть бути зареєстровані. Спосіб гідростатичного нівелювання ґрунтується на визначенні взаємного перевищення точок, що перевіряються, за рівнем стояння підфарбованої рідини в сполучених посудинах. Застосовується для побудови профілів і спостереженням за осіданнями споруди. Метод доцільний у важкодоступних умовах, коли інші геодезичні методи незастосовні. Метод висків застосовують для визначення взаємних горизонтальних зміщень точок, розташованих на одній вертикалі. Висок складається з гнучкого сталевого дроту, закріпленого вгорі і натягнутого підвішеним знизу вантажем, поміщеного для “заспокоєння” у посудину з густою рідиною. Нитка виска по усій висоті не повинна торкатися поверхні споруди. Вимірювання горизонтальних переміщень точок, за якими ведеться спостереження, проводиться за шкалами горизонтальних лінійок, закріплених у цих точках. а)
б) Рис. 61. Застосування геодезичних методів для визначення лінійних переміщень: а - метод гідростатичного нівелювання; б - метод висків; 1 - шланги від посудини з водою; 2 - трубки; 4 - нитка; 5 - точки, де проводять виміри; 6 - отвір у стіні
Для вимірювання кутових переміщень використовують клинометри. За принципом дії розрізняють важільні та клінометри, основою яких є рівень. Важільний клінометр найбільш простий для вимірювання кутових переміщень з достатньою точністю. Він складається з металевого важеля, закріпленого на об¢єкті, та двох прогиномірів з дротяним зв¢язком. Перед завантаженням конструкції на прогиномірах беруть відліки 1 і 2, а після завантаження 1¢та 2¢. Тангенс кута повороту перерізу визначається за формулою
Рис. 62. Схема важільного клінометра: 1- прогиномір; 2 - дріт; 3 - важіль; 4 - конструкція
Клінометр, в основі якого високочутливий горизонтальний рівень (клінометр Стоппані), схематично подано на рис. 63. Клінометр закріплюють у заданому перерізі конструкції і встановлюють рівень горизонтально (повітряну бульбашку суміщують з рискою). Рівень шарнірно закріплений до конструкції; його переміщують відносно конструкції мікрометричним гвинтом, градуйованим у градусах. Після завантаження рівень гвинтом знову встановлюють у горизонтальне положення. Різниця відліків до і після завантаження є кут повороту перерізу.
Рис. 63. Схема роботи клінометра: 1 - конструкція; 2 - бульбашка; 3 - рівень; 4 - гвинт мікрометричний
3.2. Фізичні основи тензорезисторів. 3.3. Реєстрація динамічних, швидкісних і сейсмічних процесів.
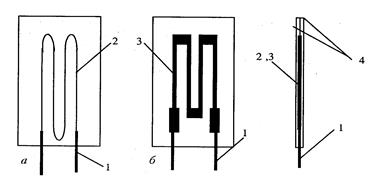
Література:[1], стор. 34-39, 46-54. 3.2. Найбільш точні дані про деформацію можна отримати за допомогою електричних тензометрів, які вимірюють опір, ємність, індуктивність. Такий прилад складається з двох частин: тензометра, який деформується разом з досліджуваним елементом конструкції і перетворює деформацію в електричний параметр; реєструвального приладу, що фіксує зміну електричного параметра. Відомі декілька видів тензометрів: омічного опору, ємнісні, індуктивні, п'єзоелектричні, феромагнітні та ін. Тензорезистори - найбільш розповсюджені й універсальні перетворювачі деформації твердого тіла в електричний сигнал. Принцип дії тензорезисторів полягає у здатності провідникових та напівпровідникових матеріалів змінювати омічний опір під час деформації. Ця властивість називається тензоефектом. Однією з основних характеристик тензорезистора є відношення відносного опору DR/R до відносної деформації D l/l, яке називається коефіцієнтом теyзочутливості. Чутливий елемент провідникового тензорезистора виготовляють з дроту діаметром 10...25 мкм або тонкої фольги товщиною 2... 5 мкм. Чутливу частину тензорезистора наклеюють на якісний напір (основу), зверху теж наклеюють папір, ізолюючи чутливий елемент. Будова тензорезистора подана на рис. 64. Омічний опір змінюється тому, що під час деформації міняється довжина і діаметр дроту. Чутливу частину тензорезистора (решітку) виготовляють із високоомного дроту (сплав міді з нікелем), до кінців якої під'єднуються виводи з мідного дроту діаметром 0,15...0,3 мм.
Рис. 64. Будова тензорезистора: а - тензорезистор з дроту; б - з фольги; 1 - вивід з дроту; 2 - провідник з дроту; 3 - провідник з фольги; 4 - папір
Опір тензорезисторів, що використовуються при випробуваннях, лежить у межах 100...400 Ом. Тому залежно від діаметра та довжини дроту тензорезистори можуть бути багаторядними з різними базами. Недоліком тензорезисторів з дроту є їх поперечна тензочутливість, оскільки невелика ділянка дроту на згинах розташована в поперечному до вимірюваної деформації напрямі. Деяку похибку в результати вносить шар клею між решіткою та основою. Тензорезистори з фольги не мають цих недоліків, тому що поперечні ділянки чутливого елемента (решітки) ширші, мають значно менший опір, ніж повздовжні, і під час поперечної деформації не впливають на покази. Виготовляють такі теизорезистори витравлюванням непотрібної частини рисунка на фольговій основі. За цією технологією виготовляють розетки тензорезисторів для вимірювання деформацій при складному напруженому стані елемента. Це звичайні тензорезистори розташовані віялоподібно, з одним спільним виводом, що дозволяє виміряти деформацію по трьох напрямах і за ними визначити головну деформацію. Коефіцієнт тензочутливості провідникових тензорезисторів залежить в основному від матеріалу дроту і може коливатись в межах від 1,8 до 6. Основний розмір (база) тензорезисторів нормований - 5; 10; 20; 30; 50; 75; 100; 200мм. Під час випробовувань металоконструкцій використовують бази до 20 мм, а бетонних ~ 50...200 мм. До позитивних якостей тензорезистора відносяться: можливість безпосередньої реєстрації деформацій як на поверхні, так і всередині конструкції; висока точність і можливість вимірювання деформацій на всіх ступеняхнавантаження, аж до текучості матеріалу конструкції; порівняна простота розташування давача на досліджуваній конструкції і можливість встановлення його в місцях, недоступних для механічних приладів; можливість дослідження деформацій різних деталей і елементів конструкцій під статичними і динамічними навантаженнями; відносна простота і дешевизнавиготовлення; мала маса та розміри. Одночасно провідникові тензорезистори мають ряд недоліків: недостатньо високу електрична чутливість, що зумовлює необхідність використання складної реєструвальної апаратури; понижену чутливість за малої бази; чутливість до змін температури; вживання тензорезистора лише один раз. Найбільш високочутливими є напівпровідникові тензорезистори. Їх виготовляють з монокристалів кремнію або германію. Перпендикулярно головній кристалографічній площині вирізають пластини товщиною 0,05...0,1 мм, шириною 0,5... 1 мм, з яких виготовляють тензорезистори з базою 2... 15 мм. Їх можна використати без основи, тобто безпосередньо приклеювати до досліджуваної поверхні. Напівпровідникові тензорезистори мають дуже високий коефіцієнт тензочутливості, який досягає 150...200. Вихідний сигнал з такого давача набуває значної амплітуди (більше 0,1В ), що дає можливість використовувати стандартну вимірювальну апаратуру. Однак напівпровідникові тензорезистори мають суттєві недоліки. Початковий опір і чутливість залежать від температури; високий температурний коефіцієнт опору; обмежений діапазон деформування; чутливість залежить від рівня деформації. Для зменшення цих залежностей необхідна температурна компенсація, що в свою чергу зумовлює використання складної реєструвальної апаратури. Точність вимірювання деформацій залежить від багатьох факторів: розміру бази вимірювання; підготовки поверхні елемента конструкції; додержання технології наклеювання тензорезистора; гідроізоляції тензорезистора; комутації; перевірки опору між решіткою тензорезистора та поверхнею конструкції. Поверхні для наклеювання тензорезисторів готують так: металеву поверхню зачищають від фарби, іржі за допомогою карборундових брусків, шліфувального наперу, далі ЇЇ знежирюють ацетоном та спиртом. Бетонну поверхню очищають від бруду, шліфують карборундовим бруском. Раковини заливають гіпсом, після висихання якого ділянку наклеювання знову зачищають шліфувальним папером до отримання гладкої поверхні, знежирюють. Рекомендації з наклеювання тензорезисторів залежать від його типу, виду основи, клею, можливості створення притискальних зусиль на тензорезистор під час наклеювання, можливості гарячого тверднення клею. Найоптимальніша товщина клеєвого шару ~ до 0.2 мм, при цьому деформації поверхневого шару конструкції та тензорезистора рівні. Якість проклеювання всієї поверхні тензорезистора має великий вплив на похибку вимірювання. За наявності непроклеєних місць деформація решітки тензорезистора відрізняється від деформації поверхневого шару елемента конструкції і внаслідок цього виникають додаткові похибки. Клеї повинні мати гарну адгезію (прилипання) до матеріалу основи тензорезистора та матеріалу поверхні, стабільні та високі діелектричні властивості, термогідростійкість. До таких відносять: карбінольні, кремнійонітрогліфталеві, фенолформальдегідні. Волога негативно діє на роботу тензорезистора, міняє фізико-механічні та ізоляційні властивості основи і створює можливість витікання струму. Існує декілька способів захисту тензорезистора від неї. Всі способи мають задовольняти такі вимоги: захисний засіб не повинен викликати деформацію тензорезистора, а також впливати на вимірюваний фактор, тобто механічна міцність захисного матеріалу повинна бути якомога мінімальною. Одним з шляхів захисту є покриття тензорезистора ізоляційним матеріалом, яким може бути вазелін, віск, карбінольно-цементна паста. Після приклеювання та гідроізоляції тензорезистора необхідно перевірити якість ізоляції клеєвого шару, вимірюючи його опір мегомметром. При статичних випробуваннях опір клеєвого шару має бути не менше 50 Ом. За менших значень не виключена можливість витікання струму, що може дати невірні результати. Для реєстрування (вимірювання) зміни омічного опору тензорезистора під дією деформації, що виникає в досліджуваній конструкції, використовують мостові схеми. На рис. 65 представлено принципову схему вимірювального приладу, що працює за принципом моста Уітстона. Міст складається з чотирьох плечей (опорів): в одну його діагональ BDпід'єднаний реєструвальний елемент, а в другу AC - джерело струму. Робочий тензорезистор R1 наклеєний на досліджувану конструкцію, є одним з плечей мосту. В друге плече під'єднують компенсаційний (температурний) тензорезистор R2, який аналогічний робочому, але на відміну від нього не підлягає деформації. Для забезпечення однакового температурного режиму обидва тензорезистори встановлюють неподалік один від одного. При зміні температури в них виникають однакові температурні деформації, а відповідно, й однакові зміни опору. Оскільки вони під'єднані в суміжні плечі моста, це не розбалансовує його і, відповідно, деформації, викликані зміною температури, не вплинуть на результати вимірювання.
Рис. 65. Принципова схема вимірювання: 1 - підсилювач; 2 - реєструвальний елемент; 3 - джерело живлення; R1 - робочий тензорезистор; R2 - компенсувальний теyзорезистор; R3, R4 - резистори балансування моста
Покази робочого тензорезистора вимірюють безпосередньо або нульовим методом. Під час безпосереднього вимірювання зміна опору робочого тензорезистора, викликана деформацією його решітки, визначається за зміною струму в діагоналі BD моста. Цей метод можна використати як при статичних, так і динамічних випробуваннях. Тут використовують схему неврівноваженого моста, живлення якого здійснюють постійним або змінним струмами. Під час випробовувань величини деформацій, а відповідно, і зміни опорів тензорезистора незначні, тому необхідна високочутлива реєструвальна апаратура. Для збільшення величини вихідного параметра моста додатково використовують підсилювач. Вимірюють так. До завантаження конструкції шляхом зміни резисторів R3 та R4 міст балансують. В діагоналі моста струм не протікає, що фіксує реєструвальний елемент. Після завантаження конструкції тензорезистор деформується, міняється його опір, міст розбалансовується і в його діагоналі починає протікати струм. Шкалу реєструвального приладу можнапроградуювати у відповідних одиницях деформації. До реєструвальних приладів для статичних і динамічних випробувань відносяться ІСД-2; ІСД-3; ІД-62; АІД-2М; УТС-1-ВТ-12; АТ-5; ЦТМ-3; ЦТМ-5; ЦТУ-1; АР-2 та ін.
3.2. Під час динамічних випробувань необхідно визначати параметри, що використовуються для оцінки напружено-деформованого стану конструкції: амплітуду, частоту, прискорення, швидкість коливань, а також деформації. Прилади для визначення цих параметрів повинні забезпечувати можливість або взяття відліків за шкалою, або запису коливань, щоб при подальшій їх обробці визначати необхідні параметри. Залежно від зв¢язку з досліджуваною конструкцією прилади розділяють на дві групи: контактні і дистанційні. Контактний або сам встановлюється на конструкцію, або на ній закріплюють виносний елемент. Більшість сучасних вимірювальних приладів конструюють саме за останнім принципом. До дистанційних відносять спеціальні кіно- та відеознімальні камери - фототіньові та фотоелектронні прилади, а також основані на методах взаємоіндукції та вихрових струмів. Механічні прилади реєструють коливальні процеси і поділяються на такі: - вібрографи - замірюють і записують лінійні переміщення предмета, що коливається; - сейсмографи - записують коливання ґрунту від землетрусів чи вибухів і мають точність більшу від вібрографів; - торсіографи - заміряють крутильні коливання; - велосіографи - замірюють і записують швидкості тіл, що коливаються; - акселерографи - замірюють і записують прискорення тіл, що коливаються. Електричні прилади для запису коливальних процесів досконаліші проти механічних, точніші, для них можливі вплив інерції та дистанційне зняття параметрів у багатьох точках менш трудомісткі. Вони складаються із первинних (вібродавачі) та вторинних (записувальних та реєструвальних) пристроїв. Вібродавачі встановлюють на конструкцію. Вони перетворюють механічні коливання в зміни електричних параметрів, які реєструються вторинними приладами. Вторинними приладами є осцилографи (шлейфові, електронні, струменеві), магнітографи, швидкодійні самозаписувальні прилади. Найпростішою для вимірювання амплітуд є вібромарка. ЇЇ креслять на цупкому папері у вигляді трикутника з основою H = 5...20 мм і довжиною L, в 10 разів більшою за основу. По висоті паралельно основі, трикутник розділений паралельними лініями на 10 частин. Вібромарка наклеюється на конструкцію, що коливається в напрямку стрілок. При частоті коливань більше 7 Гц чіткість ліній зникає і дослідник може заміряти віддаль l до перетину здвоєних трикутників, а потім визначати розмах коливань (амплітуду) за формулою
Рис. 66. Механічні прилади для динамічних випробувань: а - вібромарка; б - індикатор; в -амплітудомір; 1 - пружина; 2 - індикатор; 3 - масивне кільце; 4 - диск; 5 - мікрометричний гвинт; 6 - основа
Вібромарка дозволяє вимірювати постійну амплітуду коливань від 1 до 20 мм при частоті 7...15 Гц. Для заміру малих амплітуд порядку 0,1...0,2 мм на чорний папір наклеюють тонкий блискучий дріт і освітлюють яскравим світлом. Ширину розмитого зображення міряють з допомогою мікроскопу. Постійну амплітуду коливань можна заміряти індикатором годинникового типу. Його кріплять до нерухомої точки, не зв¢язаної з конструкцією, так, щоб впирався в поверхню конструкції паралельно її коливанням. Розмах коливань, рівний подвоєній амплітуді 2А, вираховують за шкалою приладу, на якій з¢являється затемнений сектор. Амплітудомір А.М.Ємельянова і В.Ф.Смотрова складається із масивного кільця 3, що є інерційною масою і опирається на диск 4, закріплений до основи 6 чотирма стрічковими пружинами 1. В кінець кільця вставлений індикатор 2, шток якого впирається в мікрометричний гвинт 5, встановлений на нижньому диску 6. Частота власних коливань інерційної маси приладу 2,5 Гц. Прилад ставлять на поверхню конструкції, індикатор можна вважати закріпленим нерухомо і за крайніми відхиленнями його стрілки, яка створює затемнений сектор, визначають амплітуду коливань. Багатоязиковий частомір Фрама складається із набору пластинок з вантажами на кінцях, змонтованих на загальній підставці. Пластинки мають різну довжину. Залежно від їх розміру і ваги вантажів кожна з них має деяку частоту власних коливань. Ці частоти підібрані так, щоб перекрити певний діапазон.
Рис. 67. Механічні прилади: а - частомір; б - ручний віброграф; 1 - корпус; 2 - трубка; 3 - гвинт (стопор); 4 - конусоподібний наконечник; 5 - стрижень; 6 - пружина; 7 - загострений важіль; 8 - восковий папір; 9 - визначник часу; 10 - касета; 11 - ручка; 12 - стрілко-протяжний механізм
На досліджуваній конструкції частомір встановлюють так, щоб напрямок коливань був перпендикулярний пластинкам. Під час коливань конструкції разом з нею коливається частомір. Якщо частота коливань конструкції знаходиться в діапазоні вимірів приладу, відповідна пластинка попаде в резонанс. Її амплітуда помітно відрізнятиметься від інших. На кожній пластинці маркована її власна частота. Частота коливань конструкції рівна власній частоті пластинки, яка найсильніше коливалась. За однакової вібрації двох пластинок частота коливань конструкції знаходиться між ними. Якщо жодна пластинка не потрапляє в резонанс, то це значить, що частота коливань знаходиться за межами вимірювального діапазону і необхідно використовувати частомір з іншим діапазоном частот. Ручним вібрографом міряють амплітуди коливань від 0,05 до 6 мм з масштабом 6:1, 2:1, 1:1 при частоті 5...100 Гц. Інерційною є маса приладу. Віброграф тримають в руках чи встановлюють на штативі так, щоб напрямок коливань збігався з поздовжньою віссю рухомого стрижня, а наконечник впирається в точку конструкції, коливання якої записують. Записують віброграми на червоній восковій стрічці шириною 25 мм гострим металевим пером, з¢єднаним з важелем. Визначник часу працює від внутрішньої батареї чи зовнішнього джерела струму і наносить на стрічку мітки із заданим інтервалом 1с. Найбільш досконалим механічним приладом контактного типу вважають віброграф Гейгера. Принцип його роботи оснований на коливанні корпусу, з¢єднаного системою важелів із стрілкою, відносно нерухомої інерційної маси, яка утримується в заданому положенні спіральною пружиною. Віброграму записують пером на паперовій стрічці шириною 50 мм, що рухається. Стрічка зрушується годинниковим механізмом з ручним заводом і плавним регулюванням швидкості в межах від 0.5 до 2 і від 5 до 20 см/с при двох положеннях перемикача. Амплітуда від 0,05 до 10 мм записується зі збільшенням в 3-12 разів з похибкою до 5% в інтервалі частот 2,5...300 Гц. Визначник часу працює з інтервалом в 1 с від приводу стрічкопротяжного механізму або з меншим інтервалом - від зовнішнього джерела.
Рис. 68. Схема вібрографа Гейзера: 1 - корпус; 2 - планка; 3 - інерційна маса; 4 - спіральна пружина; 5 - ручка; 6 - втулка; 7 - трубка
Електричні прилади є багатоканальними, швидкодійними і точнішими, ніж механічні. У них давачі - перетворювачі під час коливань виробляють сигнали, які по дротах передаються на осцилограф, магнітограф, самописець або комп¢ютер. Деформації під час динамічних випробувань можна заміряти звичайними тензорезисторами, які використовують і при статичних випробуваннях. Схема установки тензорезисторів при динамічних випробуваннях також мостова. Відмінність в тому, що індивідуальне перетворення сигналу від кожного тензорезистора необхідно в один момент часу, а не послідовно, як при статичних випробуваннях. Тому для кожного тензорезистора слід встановлювати свій тензопідсилювач. Перед випробуваннями необхідно провести градуювання тензорезисторів. На фотопапері осцилографа записують градуювальний сигнал від кожного тензорезистора, за яким надалі оцінюють їх деформацію. Широко використовують у випробуваннях будівельних конструкцій індукційні вібродавачі ВЄГИК, ВИБ-А, К-001. Їх принцип роботи полягає в наступному: корпус приладу встановлюють на досліджуваний об¢єкт і він коливається разом з ним, а маятник через інерцію залишається нерухомим і так створюється відносний рух індукційної котушки, закріпленої на кінці маятника, та постійного магніту, прилаштованому на корпусі. Вторинними приладами для динамічних випробувань є осцилографи, швидкодійні самозаписувальні прилади, магнітографи, ЕОМ. Якщо віброперетворювачі мають на виході сигнал достатньої величини і нечутливі до коливань температури, то їх підключають до вторинного приладу безпосередньо. Якщо потужність вихідного сигналу недостатня, застосовують підсилювачі. Світлопроменеві осцилографи дають можливість візуально спостерігати і синхронно записувати на фотострічці осцилограми, одну або декілька функцій часу. Це забезпечує набір гальванометрів з різними власними частотами і широким діапазоном швидкостей руху фотострічки. Струм від первинного приладу проходить через петлю чи рамку гальванометра і, взаємодіючи з магнітним полем, викликає поворот дзеркала пропорційно струму. Світловий промінь пронизує систему лінз і відбивається від дзеркала гальванометра на фотострічку, що рухається. Дзеркальний барабан, який обертається навколо осі, розгортає зображення на екрані для візуального спостереження, що дозволяє вибирати швидкість і масштаби таким чином, щоб окремі осцилограми від кількох гальванометрів не накладалися одна на одну.
Рис. 69. Принципова схема світло променевого осцилографа: 1 - лампа; 2 - конденсатор; 3, 6 -лінзи; 4 - дзеркало гальванометра; 5 - гальванометр; 7 - фотострічка; 8 - дзеркало; 9 - барабан; 10 - екран
В струменевих осцилографах замість світлового променя використовують тонкий струмінь чорнила, направлений від гальванометра на паперову стрічку, яка рухається. Це дозволяє отримати осцилограму на паперовій стрічці без її додаткової обробки (проявлення). Електронно-променеві осцилографи дозволяють реєструвати високочастотні процеси завдяки безінерційності. Їх можна обладнати запам¢ятовувальними електронно-променевими трубками, які зберігають протягом певного часу записане зображення і забезпечують його повторне відновлення. Швидкодійними самозаписувальними приладами записують невелику кількість (до 9) низькочастотних процесів безпосередньо на папір. Їх принцип роботи базується на повороті в магнітному полі рамки з тонкого дроту, до якого прикріплено важіль з трубкою для подачі чорнила. Під дією електричного струму, підведеного до виводів рамки, створюється кружний момент і важіль повертається на певний кут. На стрічці, що рухається, записуються коливання досліджуваної конструкції. У магнітографах носієм отримуваної інформації є магнітна стрічка, що рухається з постійною швидкістю поблизу магнітних головок, які записують, стирають і відтворюють електричний аналог сигналу, що дає можливість детально проаналізувати записи з допомогою сучасного обладнання. Недоліками магнітограм є неможливість візуального сприйняття сигналограм, менша чутливість і вплив зовнішніх електромагнітних полів.
Рис. 70. Схема швидкодійного самозаписувального приладу: 1 - котушка для подачі; 2 - магнітна стрічка; 3 - котушка для прийому; 4-6 - магнітні головки стирання запису та відтворення; 7 - генератор несучої частоти; 8 - модулятор; 9,10 - демодулятор; 12 - генератор стирання
Великі можливості для визначення параметрів коливань будівельних конструкцій мають прилади, оснащені ЕОМ. Вони дозволяють не тільки фіксувати процеси коливань, але й обробляти і аналізувати отримані дані. Так, прилад VIBROPORT30 фірми SCHENCK заміряє амплітудні та фазові характеристики, частоти коливань, проводить частотний і гармонійний аналізи тощо.
Питання до контрольно роботи № 2 1. Перерахуйте можливі методи створення статичного навантаження. 2. Динамометри, їх види, призначення. 3. Чим принципово відрізняється навантажувальні пристрої з жорстким і м¢яким навантаженням? 4. Спосіб підвішування вантажів для створення зосередженого навантаження (переваги, недоліки). 5. Спосіб натягування для створення зосередженого навантаження (переваги, недоліки). 6. Метод створення зосереджених зусиль гідравлічними домкратами. 7. Що таке силова підлога? 8. Приклад створення рівномірно розподіленого навантаження за допомогою води. 9. Приклад створення рівномірно розподіленого навантаження за допомогою тиску повітря. 10. Приклад випробування кроквяної балки за допомогою натяжного пристрою. 11. Приклад створення рівномірно розподіленого навантаження за допомогою підвішування платформ з вантажами. 12. Приклад створення рівномірно розподіленого навантаження за допомогою гідродомкратів. 13. Способи створення ударного навантаження. 14. Створення вимушених коливань за допомогою вібромашин. 15. Механічний тензометр Гугенбергера (принцип дії, переваги, недоліки). 16. Електромеханічний тензометр Аістова. 17. Види тензометрів, що застосовуються для вимірювання лінійних деформацій. 18. Прогиноміри. 19. Індикатори годинникового типу. 20. Застосування геодезичних методів для вимірювання лінійних переміщень. 21. Прилади для вимірювання кутових переміщень. 22. Види тензорезисторів. Їх переваги. 23. Тензоефект. 24. Принципова схема вимірювального приладу, що працює за принципом мосту Уїнстона. 25. Механічні прилади для реєстрації коливальних процесів. 26. Прилади для вимірювання амплітуд. 27. Принцип дії світло променевого осцилографа.
|









 , (15)
, (15) - збільшення показів приладу; Dn - різниця відліку за шкалою; m - ціна однієї поділки шкали.
- збільшення показів приладу; Dn - різниця відліку за шкалою; m - ціна однієї поділки шкали.

 . (16)
. (16)
 . Лінійне переміщення Dd вимірюють подібно, як під час деформації тензометром.
. Лінійне переміщення Dd вимірюють подібно, як під час деформації тензометром.



 , де а=1-1¢ - переміщення точки А; в=2-2¢- переміщення точки В.
, де а=1-1¢ - переміщення точки А; в=2-2¢- переміщення точки В.



 .
.