Принципы разработки систем группового управленияПри групповом управлении в ГПС требуется обеспечить взаимосвязь разнородного оборудования и координацию движений ПР, выполняющих технологический процесс или транспортные операции. Для этого технические средства управления различных уровней дополняются устройствами промежуточного хранения данных, связи с оператором, концентрации, контроля и т. д. Групповое управление оборудованием сводится к синхронизации последовательности его работы и анализу состояния системы, проверки условий и выбору оптимальных действий. Групповое управление роботами заключается в решении задачи координации движения в динамической среде при выполнении ПР функциональных задач в реальном масштабе времени. В системах группового управления станками от ЭВМ управляющие программы могут выдаваться различными способами в зависимости от структуры системы управления и требований к времени выдачи информации на устройства ЧПУ. Если в станочном устройстве ЧПУ имеется память у каждого станка, то управляющая программа (УП) полностью выдается на ЭВМ верхнего ранга системы группового управления. При этом УП будет выдана перед началом обработки новой партии деталей. Время передачи УП не будет являться лимитирующим фактором. Такой режим выдачи УП назовем полным. Если в станочном устройстве ЧПУ нет памяти, необходимой для размещения всей или значительной части управляющей программы, то более мелкая порция информации (кадра или символа) выдается из ЭВМ верхнего ранга по прерыванию. Структуру с покадровым и посимвольным режимами выдачи УП имеют системы, выполненные с применением у станков серийных устройств ЧПУ на элементах малой степени интеграции. В этом случае порции управляющей информации выдаются ЭВМ по запросам устройства ЧПУ и на его приемный регистр, минуя фотоввод. Применение полного режима выдачи УП для структур с большей степенью интеграции является более эффективным, так как УП здесь выдается во время переналадки станка на новую партию деталей и отказ ЭВМ верхнего ранга (в случае неисправности) не влияет непосредственно на технологический процесс обработки деталей. Вопрос об использовании полного режима (в сравнении с посимвольным и покадровым) решается в зависимости от стоимости устройств и показателей надежности. При разработках новых ГПС применяется полный режим выдачи УП. Если используется покадровый режим по запросу от устройства ЧПУ, ЭВМ останавливает выполнение текущей программы и входит в прерывающую программу выдачи кадра. При этом кадр программы выдается построчно совместно с синхронизирующим сигналом таким образом, чтобы имитировать покадровый ввод через фотосчитыватель. Для этого необходима задержка времени между выдачей соседних строк. При посимвольном режиме после выдачи одного символа (строки) кадра на то или иное устройство ЭВМ сразу же переходит к выдаче символа на следующее устройство. Она не организует задержку времени до того момента, пока не станет возможной выдача следующего символа на то же устройство. В качестве критерия эффективности режимов выдачи УП примем минимум среднего времени обслуживания в системе произвольной совокупности запросов на выдачу кадров УП. Этот критерий отражает производительность системы управления и ее возможности по управлению участком станков. При покадровом режиме среднее время обслуживания одного запроса Vк=tв+tк+tп, (4.1) где tв —среднее время ввода заявки в ЭВМ; tк —среднее время выдачи кадра УП; tn — среднее время передачи и записи в накопителе устройства ЧПУ. Кадры УП находятся в ОЗУ, а заполнение зон станков в ОЗУ из внешнего запоминающего устройства не влияет на процесс выдачи кадров, так как имеет более низкий приоритет. При посимвольном режиме среднее время обслуживания запроса на выдачу символа кадра УП Vс= tв+tс, (4.2) где Vс — среднее время выдачи символа УП из ОЗУ. Пусть Ь — среднее число символов в кадре УП. Тогда среднее время выдачи кадра УП из ОЗУ, передачи и записи в накопителе устройства ЧПУ при покадровом режиме будет определяться по формуле bТс = tк+tп, (4.3) где b —интервал времени между передачей соседних символов, определяемый из условий синхронизации процесса с работой фотосчитывающего устройства (Тс =t с +t п +∆t, ∆t - средняя временная задержка, необходимая для синхронизации процесса передачи символов с работой фотосчитывающего устройства). Значение ∆t >τп (τп — среднее время переключения организующей системы для выдачи символа на следующее устройство ЧПУ с учетом времени ввода запроса). При покадровом режиме совокупность из q запросов будет обслуживаться в среднем за время q(bTc+tв). В случае посимвольного режима q запросов будут обслужены в среднем за время q [ b(tc+tп+ τп )+tв ]. Посимвольный режим будет более эффективным, если q (bTc + tв)> q [ b(tc+tп+ τп )+tв ], так как Тс =t с + t п + ∆t. Таким образом, если Тс – t с - t п > τп, то более эффективным при прочих равных условиях будет посимвольный режим. Если последнее неравенство не выполняется, то более эффективным будет покадровый режим (для большинства серийно выпускаемых устройств Тс ≈1 мс). Кроме вопроса посимвольной и покадровой выдачи УП при выборе структуры системы управления необходимо рассмотреть и распределение УП в памяти ЭВМ верхнего уровня и состав этой ЭВМ, который определяет стоимость оборудования. Каждая из ГПС предполагает различный подход к выбору базовых средств и систем программного управления оборудования, задействованного в ней. Основу техники управления в ГПС составляют программируемые логические контроллеры (программируемые командоаппараты), циклопозиционпые системы с ограниченными задачами управления перемещениями рабочих органов в ГПМ (позиционирование по 1...3 координатам) и многокоординатные системы ЧПУ различного назначения и исполнения. Обобщенная структура современных систем ЧПУ показана на рисунке 4.2, где выделены внешние устройства, устройства связи с объектом управления и центральная процессорная часть. Состав перечисленных устройств в системе видоизменяется с разделением на устройства, непосредственно входящие в систему, и устройства, эпизодически подключаемые для решения отладочных задач. В зависимости от конструкторской компоновки их поставляют в виде автономных выносных устройств или встроенными при шкафном исполнении системы. Связь устройств с основной частью системы осуществляется по стандартным каналам (параллельному или последовательному) с соответствующими интерфейсными модулями — БИФ (блоками интерфейсными) или контроллерами связи (КС), входящими в систему. В основной набор внешних устройств, как правило, входят: устройства ввода с перфоленты различных типов (реверсивные, старт-стопные с подмоткой и перемоткой и непрерывным вводом массива данных);
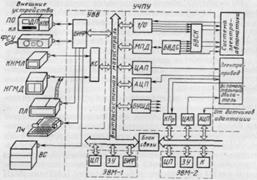
Рис. 4.2. Обобщенная структура управления ГПС: ПО — пульт оператора: КЛ — клавиатура ручного ввода; ДП — дисплей; КПО — контроллер пульта; ФСУ — фотосчитывающее устройство ввода с перфоленты; КНМЛ — кассетный накопитель на магнитной ленте; НГМД — накопитель на гибком магнитном диске; ПЛ — перфоратор ввода на перфоленту; ПЧ — печатающее устройство; ВС — внешние системы (ЭВМ верхнего уровня, локальная вычислительная сеть, системы ЧПУ других ГПМ в составе ГПС): УВВ — устройство ввода-вывода; БИФ — интерфейсный блок; КС — контроллер вязи; 1/0 — модули обмена дискретными сигналами; МПД — модуль передачи данных; ЦАП — АЦП — преобразователи: БУШД — блоки управления шаговыми двигателями; БВДС — блоки дискретных сигналов: БВСК — блоки силовых ключей; ЦП — центральный процессор; ЗУ — модуль памяти; К — каналы ЭВМ дисплей на базе электронно-лучевой трубки или газоплазменных матричных индикаторов с отображением алфавитно-цифровой информации и емкостью от 160 до 1000 символов. В перспективе их планируется использовать и для отображения графической информации; кассетные накопители на магнитной ленте или магнитных дисках. Перфораторы, устройства вывода на печать в состав систем ЧПУ, как правило, не входят. Их подключают к системам при отладке программного обеспечения и программ управления обработкой. Связь с внешними системами обязательна, если в составе многоуровневых систем управления ГПС используются системы ЧПУ. В состав устройств связи с объектом управления (УСО) входят блоки управления дискретной автоматикой: 1/0 — модули обмена дискретными сигналами для управления электроавтоматикой (в составе УЧПУ); БВДС — выносные блоки управления электроавтоматикой (блоки выносные дискретных сигналов) со связью с УЧПУ через быстрый малопроводной канал обмена МПД (модуль передачи данных). Встраиваемые и выносные блоки обмена дополняются выносными блоками силовых ключей (БВСК) для непосредственного управления исполнительными механизмами электроавтоматики. В состав УСО входят также блоки управления электроприводами: ЦАП — цифроаналоговые преобразователи для выдачи на блоки управления двигателями подач и главного движения сигналов управления стандартного уровня (10 В); АЦП — аналого-цифровые преобразователи связи с измерительными преобразователями перемещений (датчиков) подвижных частей станка по управляемым координатам. В состав УСО вводят дополнительные ЦАП или АЦП для приема аналоговых сигналов от датчиков адаптации по технологическим параметрам рабочих режимов (вибрация, температура, усилия резания и др.) и выдачи сигналов управления вспомогательными исполнительными механизмами с аналоговым управлением. Центральная процессорная часть состоит из модуля центрального процессора ЦП, модуля памяти ЗУ (запоминающего устройства) и БИФ. В качестве базового процессорного модуля выпускаемых систем ЧПУ используют известный модуль процессора (М2 микроЭВМ «Электроника-60М»).
|