Принцип действия
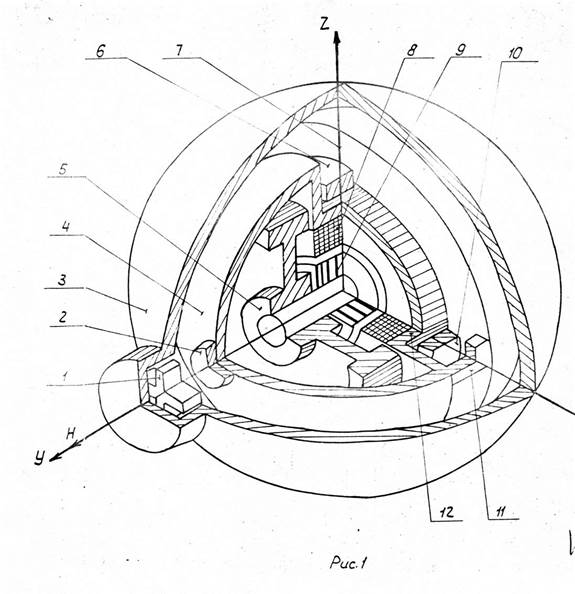
Изделие ГКУ-1 представляет собой двухрежимный корректируемый гироскопический курсоуказатель с косвенным управлением. ГКУ называет двухрежимным, т.к. он может работать в режиме ГК и в режиме ГА. ГКУ называется корректируемым, т.к. в нем скоростная и широтная девиации компенсируются путем приложения и ЧЭ корректирующих моментов, зависящих от скорости объекта и широты места. ГКУ имеет косвенное управление, т.к. необходимые для придания гироскопу компасных свойств маятниковой и демпфирующий моменты создаются не с помощью физического маятника, которым снабжен сам ЧЭ маятниковых ГК ГК, а косвенно, с помощью специальной э/м схемы управления, состоящей из измерителя отклонения оси ЧЭ от плоскости горизонта, усилителей и элементов, выполняющих роль датчиков момента. Такая схема управления позволяет автоматизировать запуск и изменять режимы и подрежимы работы ГКУ. ЧЭ ГКУ является расположенный в трехстепенном поплавком гироблоке (рис. 1) синхронной вакуумный поплавковый гироскоп (СВП), называемый в дальнейшем гиросферой (4). Гиросфера выполнена в виде герметического поплавка, состоящего из 2-х полусфер, соединенных между собой цилиндрической шейкой (12) и боковыми перемычками (11). Внутри гиросферы размещается гиромотор. Ротор гиромотора выполнен в виде двух маховиков (5), симметрично посаженных на вал, вращающийся в шароподшипниках, установленных в корпусе гиромотора. На валу между маховиками закреплена роторная обмотка гиромотора (9). Статорная обмотка гиромотора (8) размещена в цилиндрической шейке корпуса гиросферы. Гиросфера с помощью пары горизонтальных торсионов (10) подвешена в кардановом кольце (6) таким образом, что горизонтальные торсионы одним концом крепятся к перемычке гиросферы, а другим – к карданову кольцу. Карданово кольцо с помощью пары вертикальных торсионов (7) подвешено в корпусе гироблока (3) таким образом, что вертикальные торсионы крепятся одним концом к корпусу гироблока, а другим – к карданову кольцу. Пространство между гиросферой и корпусом гироблока заполнена поддерживающей жидкостью. Вес гиросферы и удельный вес жидкости подобраны таким образом, чтобы после разогрева жидкости до рабочей температуры гиросфера находилась в состоянии нейтральной плавучести. Ротор гироскопа имеет три степени свободы относительно корпуса гироскопа: собственное вращение ротора гироскопа, поворот гиросферы вокруг оси горизонтальных торсионов и поворот гиросферы вместе с кардановым кольцом вокруг оси вертикальных торсионов. Поэтому гиросферу, подвес, поддерживающую жидкость и корпус гироблока, в котором они находятся, обычно называют трехстепенным поплавковым гироблоком (ТПГ). Корпус гироблока по отношению к гиросфере выполняет роль следящей сферы.
Две пары взаимно перпендикулярных торсионов образуют торсионный (проволочный) подвес, который не только центрует гиросферу в корпусе гироблока, но и выполняет роль двух датчиков момента, прикладывающих к гиросфере моменты вокруг оси торсионов. Когда корпус гироблока находится в согласованном положении, то торсионы не закручены, и к гиросфере никакие моменты не приложены. При повороте корпуса гироблока относительно гиросферы на некоторый угол, прикладывают к гиросфере моменты, пропорциональные этому углу. Углы закручивания горизонтальных и вертикальных торсионов, т.е. углы рассогласования между корпусом гироблока и гиросферой, измеряются двумя двухкоординатными датчиками углов (ДДУ), статоры которых (2) размещены на гиросфере по оси, совпадающей с осью вращения ротора (главной осью) гиромотора, а роторы (съемники) (1) размещены на корпусе гироблока. Сигналы рассогласования от съемников датчиков угла поступают в цепи следующих систем азимутальной и горизонтальной стабилизации. Корпус гироблока помещен во внешний карданов подвес. Внешний карданов подвес обеспечивает гироблоку относительно корпуса основного прибора три степени свободы (схема). Корпус гироблока (16) жестко крепится к установочному кольцу (15), которое обеспечивает возможность быстрой замены гироблока. Стабилизация положения гироблока вместе с установочным кольцом в вертикальной плоскости относительно оси подвеса обеспечивается нижней маятниковостью гироблока, созданной смещением цапф подвеса установочного кольца относительно центра масс гироблока и установочного кольца. Благодаря маятниковости корпус гироблока вместе с установочным кольцом при отсутствии ускорений занимает положение, при котором ось вертикальных торсионов совпадает с вертикалью места, а ось горизонтальных торсионов лежит в плоскости горизонта.При наличии ускорений под действием сил инерции возникают собственные колебания маятникового узла «гироблок – установочное кольцо» вокруг цапф его подвеса. Для падения собственных колебаний предназначен жидкостной демпфер (14), закрепленный на оси подвеса установочного кольца. Горизонтальное карданово кольцо (3) подвешено на подшипниках в вертикальном кардановом кольце (5), ось цапф которого установлена в корпусе основного прибора, связанного с палубой объекта. В корпусе прибора установлен двигатель азимутальной стабилизации (9), с которым через редуктор связано вертикальное карданово кольцо. На вертикальном кардановом кольце установлен двигатель горизонтальной стабилизации (17), связанный через редуктор с горизонтальным кардановым кольцом. Двигатели стабилизации управляются сигналами двух координатных датчиков угла. Сигнал рассогласования между гиросферой и корпусом гироблока вокруг оси вертикальных торсионов, измеряемый соответствующими обмотками датчиков угла, подается в схему суммирования блока следящей системы азимутальной стабилизации и далее на двигатель азимутальной стабилизации (8). Двигатель азимутальной стабилизации через зубчатую передачу поворачивает вертикальное карданово кольцо до тех пор, пока корпус гироблока не придет в согласование с гиросферой – положение вокруг оси вертикальных торсионов. Аналогично сигнал рассогласования между корпусом гироблока и гиросферой вокруг оси горизонтальных торсионов подается в схему суммирования блока следящей системы горизонтальной стабилизации (17). Двигатель горизонтальной стабилизации через зубчатую передачу поворачивает горизонтальное карданово кольцо относительно оси его подвеса до тех пор, пока корпус гироблока не согласуется с гиросферой вокруг оси горизонтальных торсионов. Таким образом, обеспечивается непрерывное согласование корпуса гироблока с гиросферой вокруг оси горизонтальных и вертикальных торсионов. Для повышения устойчивости работы следящих систем, между ними осуществляется дополнительная связь с помощью закрепленного на устойчивом кольце поворотного трансформатора (6) и блока стабилизации. При достижении угла относительности поворота установочного и горизонтального кольца порядка 15-25° блок стабилизации подключает сигнал той или другой фазы с входа усилителя горизонтальной следящей системы в схему суммирования азимутальной следящей системы. Построенная таким образом система обеспечивает в условиях качки и наклонов объекта непрерывное согласование корпуса гироблока с гиросферой вокруг осей горизонтальных и вертикальных торсионов и обладает свойствами свободного гироскопа. Для превращения свободного гироскопа в гирокомпас необходимо создать вокруг осей торсионов моменты, пропорциональные углу отклонения главной оси гироскопа от плоскости горизонта. Связь с плоскостью горизонта достигается размещением на установочном кольце двух индикаторов горизонта (2;4), отличающихся один от другого крутизной сигнала, постоянной времени и зоной ограничения сигнала. Индикатор представляет собой высокочувствительный физический маятник, сконструированный и ориентированный так, что он реагирует только на угловые отклонения от горизонта оси цапф подвеса гироблока. Вырабатываемое индикатором горизонта напряжение, пропорциональное отклонению главной оси гироблока от плоскости горизонта используется в схеме управления ГКУ для формирования маятникового и демпфирующего моментов, необходимых для превращения свободного гироскопа, а гирокомпас. В этом случае работа следящих систем азимутальной и горизонтальной стабилизации осуществляется следующим образом: разность сигналов индикатора горизонта и датчика угла, измеряющего рассогласование между гиросферой и корпусом гироблока вокруг оси горизонтальных торсионов, усиливается и подается на управление двигателем горизонтальной следящей системы. Этот двигатель будет вращать горизонтальное карданово кольцо до тех пор, пока сигнал индикатора горизонта не сравняется с сигналом датчика угла. Вследствие этого, в положении равновесия горизонтальные торсионы окажутся закрученными на угол, пропорциональный сигналу с индикатора горизонта. Следовательно, момент, прикладываемый при этом к гиросфере со стороны горизонтальных торсионов, пропорционален углу отклонения главной оси гироскопа от плоскости горизонта. Этот момент эквивалентен маятниковому моменту, вызывающему незатухающие колебания главной оси гироскопа относительно плоскости меридиана. Для гашения этих колебаний разность сигналов индикатора горизонта и датчика угла, измеряющего рассогласование между гиросферой и корпусом гироблока вокруг оси вертикальных торсионов, усиливается и задается на управление двигателя азимутальной следящей системы. В этом случае вертикальные торсионы также оказываются закрученными на угол, пропорциональный сигналу с индикатора горизонта, вследствие чего к гиросфере со стороны вертикальных торсионов прикладывается момент, пропорциональный углу отклонения главной оси гироскопа от плоскости горизонта, который эквивалентен демпфирующему моменту, обеспечивающему затухание колебаний главной оси гироскопа относительно плоскости меридиана. Таким образом, под действием прикладываемых к гиросфере маятникового и демпфирующего моментов главная ось гироскопа автоматически устанавливается в положение равновесия, совпадающее с направлением меридиана места, что позволяет определить курс корабля, т.е. угол между диаметральной плоскостью объекта, относительно которой выставлен корпус основного прибора, и направлением меридиана места, совпадающим с положением оси вращения гироскопа. Однако автоматически приход ГКУ в меридиан происходит достаточно длительно, т.к. велик период его собственных колебаний в режиме гирокомпаса. На широте 60° он составляет около 210 минут. Такая величина периода выбрана из необходимости уменьшить реакцию ГКУ на действующее, на него внешние возмущения, т.е. для повышения точности курсоуказания. В то же время схема корректируемых гирокомпасов с косвенным управлением позволяет косвенно определить отклонение оси гиросферы от меридиана и затем ускоренно привести его в меридиан. Суть метода заключается в том, что, замеряя индикатором горизонта угол возвышения главной оси гироскопа над плоскостью горизонта, определяет отклонения главной оси от меридиана, т.к. между ними существует однозначное соответствие: угол возвышения главной оси гироскопа над плоскостью горизонта пропорционален синусу угла ее отклонения от меридиана. Определив это отклонение по имеющейся на приборе управления шкале отклонений К, можно это отклонение выбрать, подавая в цепь горизонтной следящей системы постоянный сигнал от потенциометра. Этот сигнал дополнительное закручивание горизонтальных торсионов. Момент, приложенный горизонтальными торсионами к гиросфере, заставит ее прецессировать к меридиану, причем скорость прецессии будет пропорциональна приложенному напряжению и жесткости торсионов. Указанный метод позволяет быстро определить отклонения от меридиана и привести гирокомпас в меридиан с любого начального отклонения. При движении объекта, при изменении его курса и скорости, при качке объекта и под влиянием других помех возникают вредные моменты, под действием которых главная ось гироскопа отклоняется от меридиана. Отклонение главной оси гироскопа от меридиана называется девиациями ГКУ. Для гироскопических компасов известны скоростная, широтная, интеркардиональная и баллистические девиации. Скоростная девиация возникает у ГКУ при любом движении объекта и вызывается действием северной составляющей скорости объекта. Для устранения этой девиации у корректируемых ГКУ в цель азимутальной следящей системы дополнительно вводят сигнал Е. Отрабатывается этот сигнал, азимутальная следящая закрутит вертикальные торсионы на дополнительный угол. Прикладываемый при этом к гиросфере момент коррекции, пропорциональный северной составляющей скорости объекта, при правильном выбранном его масштабе, полностью компенсирует девиацию ГКУ. Возникновение широтной девиации вызывается действием восточной составляющей скорости объекта и измерением широты места. Эта девиация также может быть полностью устранена, для чего в цепь горизонтной следящей системы подается дополнительный сигнал, пропорциональный синусу и тангенсу широты места и восточной составляющей скорости объекта. Горизонтная следящая система, обрабатывая этот сигнал, закручивает горизонтальные торсионы на дополнительный угол. Прикладываемый при этом к гиросфере момент коррекции, при правильно выбранном масштабе, полностью компенсирует широтную девиацию ГКУ. Баллистические девиации возникают при изменении курса или скорости объекта, т.е. при действии ускорений. Инерционные силы, вызванные ускорениями, воздействуют на маятник индикатора горизонта и на имеющий маятниковость узел сборки установочного кольца, вызывая их отклонения от истинной вертикали. Наибольшее влияние на работу ГКУ оказывает воздействие инерционных сил на маятник индикатора горизонта, вызывая в схеме управления ГКУ появление дополнительных сигналов с индикатора горизонта, создающих дополнительное закручивание вертикальных и горизонтальных торсионов. Накладываемые при этом на гиросферу вредные моменты вызывают изменение положения ее равновесия, т.е. баллистические девиации ГКУ. Величина баллистических девиаций определяется величиной и временем действия ускорений, а также температурами ГКУ. Интеркардиональная девиация возникает при качке объекта. Физически возникновение интеркардиональной девиации можно объяснить совместным раскачиванием в такт качке маятника индикатора горизонта и корпуса гироблока. Вырабатываемые при этом индикатором горизонта сигналы вызывают знакопеременное такт качке закручивание горизонтальных и вертикальных торсионов, вызывая наложение на гиросферу соответствующих знакопеременных моментов. Благодаря одновременному раскачиванию гироблока в такт качке появляется постоянная составляющая проекции на ось вертикальных торсионов знакопеременного момента, создаваемого горизонтальными торсионами, которая вызывает изменения положения равновесия гирокомпаса, называемое интеркардианальноой девиацией. Уменьшение баллистических и интеркардианальных девиаций в ГКУ достигается выбором длительного периода незатухающих колебаний чувствительного элемента в режиме ГК, а также благодаря применению двух включенных встречно индикаторов горизонта. При этом крутизна и постоянная времени одного индикатора горизонта в два раза больше, чем крутизна и постоянная времени другого, но рабочий диапазон первого в два раза меньше, чем второго. Такое соотношение параметров индикаторов горизонта обеспечивает независимость суммарного сигнала индикаторов горизонта от действующих ускорение при их величине более 0,01 д, когда суммарный сигнал индикаторов горизонта становится равным нулю. Таким образом, на время действия ускорений гиросфера теряет компасные свойства и остается в положении равновесия за счет моментов коррекции и компенсации. Если же ускорение меньше 0,01 д, что имеет место при качке, то амплитуды отклонения маятников индикаторов горизонта уменьшаются в несколько раз благодаря большой величине постоянной времени каждого из ИГ, что в данном случае ослабляет действие качки на ГКУ. В ГКУ помимо режима гирокомпаса предусмотрен режим гироазимута, который рекомендуется использовать преимущественно в высоких широтах, например, выше 85˚. Переход из режима ГК в режим ГА достигается переключением электрических цепей. При этом прекращается подача сигнала индикаторов горизонта в горизонтальную следящую систему, т.е. отключается маятниковый момент, а демпфирующий момент в режиме гироазимута выполняет роль горизонтирующего момента, т. е. Удерживает главную ось гироскопа в плоскости горизонта. Что касается моментов скоростной и широтной коррекции, то они накладываются совершенно одинаково, как и в режиме гирокомпаса, так и в режиме гироазимута. Вследствие этого переключения ГКУ из режима ГК в режим ГА главная ось гироскопа сохраняет положение равновесия режима ГК, т.е. направление меридиана. Принципиальное отличие режима гироазимута от режима гирокомпаса состоит в том, что, будучи отклоненным от меридиана места под действием возмущений, гирокомпас вновь придет в меридиан, гироазимут же не возвращается в первоначальное положение. В режиме гироазимута с течением времени главная ось гироскопа постепенно уходит из плоскости под действием вредных различных моментов, однако максимальная величина ухода не превышает 2,5˚/ч. Особенно заметное влияние на точность ГКУ оказывают моменты, вызывающие азимутальный дрейф гироблока. Постоянная составляющая азимутального дрейфа гироблока измеряется во времени регулирования ГКУ и компенсируется введением в схему суммирования горизонтной стабилизации дополнительного сигнала, который создает соответствующий угол закручивания горизонтальных торсионов и тем самым компенсирует постоянную составляющую азимутального дрейфа. Для автоматической компенсации постоянной составляющей азимутального дрейфа гироблока в ГКУ имеется схема автоматической балансировки (прибор управления). При точной компенсации азимутального дрейфа гироблока и точном вводе широтной коррекции в режиме ГК гиросфера устанавливается в плоскости горизонта, и сигнал индикатора горизонта равен нулю. В противном случае сигнал индикатора отличен от нуля. Для устранения дрейфа сигнал с индикатора горизонта усиливается и подается на двигатель, который через редуктор поворачивает переменный резистор-датчик сигнала автоматической балансировки. Пропорционально сигналу автоматической балансировки происходит закручивание горизонтальных торсионов компенсирующих азимутальный дрейф гироблока. Вследствие малой отработки схемы автоматической балансировки реагирует только на постоянные и медленно меняющиеся отклонения индикатора горизонта. Работа схемы автоматической балансировки продолжается до полной компенсации дрейфа, то есть до тех пор, пока сигнал индикатора горизонта не станет равным нулю. В режиме ГА схема автоматической балансировки отключается. Сам же сигнал автоматической балансировки продолжает поступать в цепь управления так, как в режиме ГК.
|