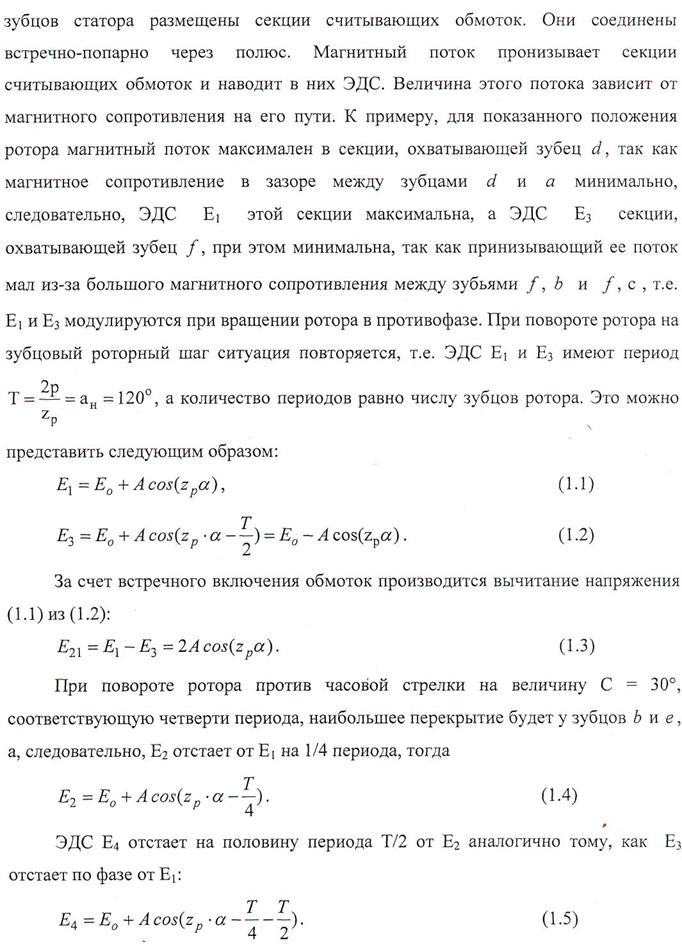
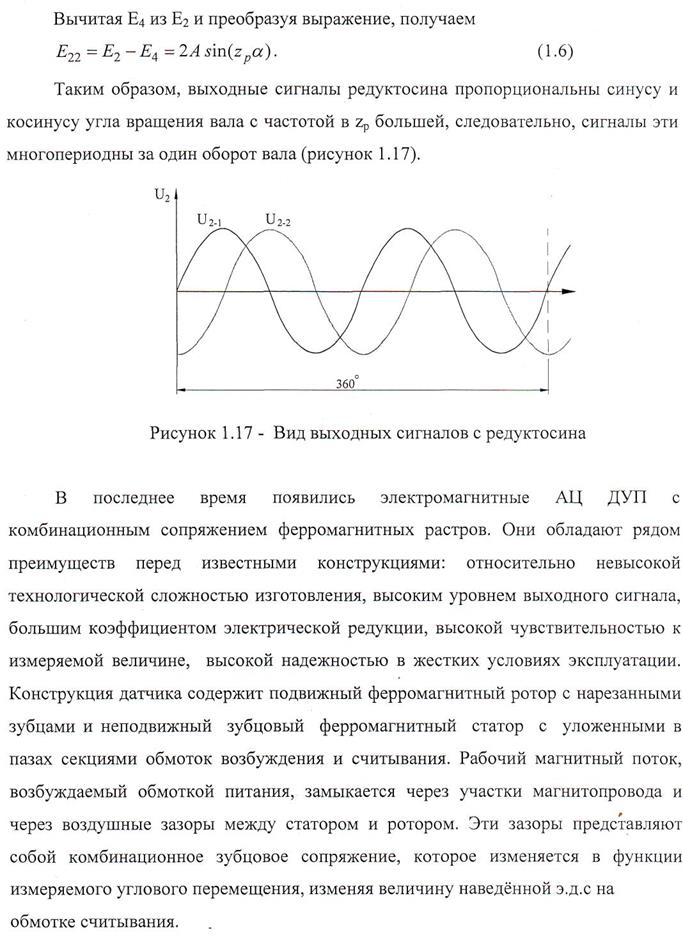
перемещений1.1 Обзор датчиков перемещений В настоящее время широко используются датчики угловых перемещений. Они применяются во многих цифровых системах управления различными объектами ракетно - космической техники, а так же в нефтегазовой промышленности и машиностроении. Поэтому от качества решения ими своих функциональных задач существенно зависят технические показатели систем управления, в которые они поставляют информацию, в частности, их точность и быстродействие. В настоящее время известно большое количество различных типов ДУП. Их разнообразие объясняется не только широким спектром решаемых ими функциональных задач, но и возможностью использования различных структурных, физических и других принципов их построения. Значительное влияние на особенности построения и технические возможности ДУП оказывает выбор физического принципа считывания информации. Наиболее широко известны электромеханические (контактные), фотоэлектрические, электростатические (ёмкостные), электромагнитные и т.д. В основе построения ДУП могут лежать и другие известные физические явления, например, радиоактивность, теплопроводность, однако подобные преобразователи в силу разных причин и прежде всего низкой разрешающей способности и критичности к внешним воздействиям не нашли широкого применения. Однако использование новых физических явлений может открыть дополнительные возможности.
Разновидностью электромеханических являются потенциометрические (или реостатные) датчики [4]. Принцип действия таких датчиков основан на зависимости сопротивления проволочного резистора от длины провода. Таким образом, если перемещение объекта будет связано с изменением положения ползунка потенциометра, получится датчик перемещения (рисунок 1.1). Потенциометрические датчики относятся к активным устройствам, поскольку для определения величины сопротивления через них должен протекать электрический ток. На практике процедуру измерения сопротивления заменяют процедурой определения падения напряжения на этом сопротивлении, которое для линейного потенциометра всегда пропорционально величине перемещения d: V = Е*(d/D), где D - величина максимально возможного перемещения, а Е - напряжение, приложенное к потенциометру.
Рисунок 1.1 - Потенциометрический датчик положения. Преимуществом реостатных (или потенциометрических) датчиков является возможность получения достаточного большого выходного сигнала, причем реостатный преобразователь датчика может питаться как постоянным, так и переменным током. Реактивное сопротивление реостатного преобразователя весьма мало (малы собственные индуктивности и емкости) в диапазоне частот, верхняя граница которого составляет несколько килогерц [7]. Большая величина, выходного сигнала часто позволяет проводить дальнейшую его обработку и регистрацию без применения дополнительных усилительных устройств, снижающих точность результатов измерений. Динамические свойства потенциометрических датчиков невысоки, поэтому их применяют для измерения статических или медленно меняющихся величин. Ограничение скорости изменения измеряемой величины вызвано наличием механических связей и значительных присоединительных масс в кинематических цепях датчика, что создает большую инерционность и снижает собственную частоту датчика до 2 - 10 Гц. Другим важным фактором, снижающим динамические свойства реостатных датчиков, является необходимость обеспечения
Стремление к обеспечению устойчивого контакта приводит к необходимости увеличения поджимающего усилия, что, в свою очередь, ухудшает динамические свойства [7]. Это связано с увеличением усилия, необходимого для перемещения движка, что накладывает ограничения на интенсивность воздействия измеряемой величины. Искажение датчика исследуемого или контролируемого процесса должно быть минимальным, в рамках допустимых погрешностей. Отсюда вытекает требование снижения усилия, прилагаемого ко входным элементам датчика. При проектировании необходимо принимать компромиссное решение исходя из минимальной суммарной погрешности, вызываемой искажением исследуемого процесса и возможной кратковременной потерей контакта. Наиболее часто реостатные датчики используют для измерения линейных и угловых перемещений и ускорений, а также статических давлений. Реостатные датчики перемещений обычно используют для измерения перемещений от нескольких миллиметров до десятков метров и углов от нескольких градусов до 360°. В случаях измерения больших перемещений используют многооборотные реостатные преобразователи или однооборотные без ограничения крайних положений. В последнем случае, в процессе измерения регистрируется серия следующих друг за другом перемещений, соответствующих повороту, движка преобразователя на 360°. Большинству потенциометров присущи следующие недостатки: 1. Значительная механическая нагрузка (трение). 2. Необходимость обеспечения механического контакта с объектом.
4. Трение и напряжение возбуждения, приводящие к нагреву потенциометра. 5. Низкая устойчивость к факторам окружающей среды. Проволочные датчики используют для измерения малых перемещений или относительных деформаций, а значит, и напряжений в деталях разнообразных механизмов [6]. В этих случаях проволочные датчики называют тензодатчиками. Проволочные датчики представляют плоскую спираль из калиброванной проволоки диаметром 0,02-0,05 мм, наклеенную на плотную бумагу толщиной 0,015-0,02 мм и заклеенную сверху. Проволочные датчики чувствительны к изменению температуры. Основой фотоэлектрического датчика является фотоэлемент [2]. Различают фотоэлементы с внешним, внутренним фотоэффектами и вентильные. При внешнем фотоэффекте освободившиеся электроны покидают освещенное вещество, при внутреннем - остаются в нем, повышая электропроводность. Вентильным фотоэлементом называется тот, в котором освободившиеся электроны переходят из слоя освещенного в слой неосвещенного вещества, отделенного тонким слоем. Ввиду недостатка электронов в одном слое и избытка в другом между слоями возникает электродвижущая сила. Фотоэлектрические датчики являются приборами высокой чувствительности. Они имеют малые габаритные размеры, простую конструкцию и их легко встраивать в системы автоматического регулирования. Они имеют высокие эксплуатационные характеристики и надёжность. Вместе с тем фотоэлектрические ПП сложны и дороги, и требуется высокий уровень культуры производства, чтобы обеспечить массовый выпуск этих устройств. Новые возможности открываются при использовании когерентных источников излучения, голографии, лазерной техники, волоконной оптики и т.д. Принцип действия оптоэлектронного датчика основан на том, что оптические лучи от одного или нескольких источников излучения проходят через оптическую среду,
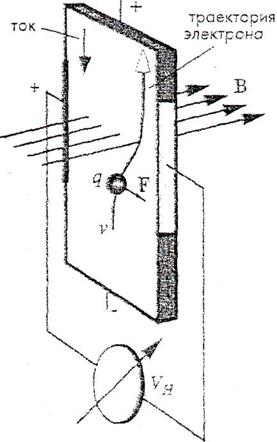
В магнитомодуляционных ДУП цифровой сигнал получается в результате взаимодействия магнитоносителя кодирующего устройства с ЧЭ. В качестве кодирующего устройства обычно применяется магнитный барабан или диск. Роль ЧЭ выполняют магнитные считывающие головки, магниторезисторы, магнитодиоды, датчики Холла[4]. По разрешающей способности магнитомодуляционные датчики уступают только фотоэлектрическим. Ширина меток кодирующих устройств этих датчиков может быть доведена до 10-12 мкм. За последние годы популярность датчиков Холла значительно увеличилась. Первоначально эффект Холла применялся для изучения электропроводности металлов, полупроводников и других токопроводящих материалов. В настоящее время датчики Холла используются для обнаружения магнитных полей и определения положения и перемещения объектов. Эффект Холла основан на взаимодействии между движущимися носителями электрического заряда и внешним магнитном полем. В металлах носителями заряда являются электроны. При движении электронов в магнитном поле на них действует отклоняющая сила. Датчик Холла изображен на рисунке 1.2.
Рисунок 1.2- Датчик Холла Электроны двигаются внутри электропроводной пластины, помещенной в магнитное поле В. На две стороны пластины нанесены дополнительные электроды, подключенные к вольтметру. Еще два электрода расположены сверху и снизу пластины, они подсоединены к источнику электрического тока [4]. Из-за действия внешнего магнитного поля возникает отклоняющая сила, перемещающая электроны ближе к правому краю пластины, поэтому эта сторона становится более отрицательно заряженной, чем левая. Очевидно, что вследствие взаимодействия магнитного поля и электрического тока возникает поперечная разность потенциалов, получившая название напряжение Холла. Знак и амплитуда этого напряжения зависят как от величины, так и от направления магнитного и электрического полей. Полная чувствительность датчика Холла зависит от коэффициента Холла, который определяется градиентом поперечного электрического потенциала на
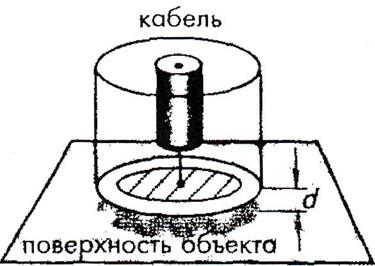
Большинство датчиков Холла изготавливаются из кремния, и их можно разделит на две основные категории: простые и интегрированные. Для построения чувствительных элементов на основе эффекта Холла применяются InSb, InAs, Ge и GaAs. Кремниевые сенсоры могут быть интегрированы на одной подложке с интерфейсными электронными схемами [4]. Такая интеграция особенно важна при построении прецизионных датчиков, поскольку напряжение Холла обычно довольно мало. Емкостные датчики перемещений имеют широкую сферу применения. Они могут использоваться как самостоятельно для определения положения и перемещения объектов, так и входить в состав других датчиков, в которых перемещения отдельных элементов вызываются воздействием на них различных сил, давления, температуры. Поскольку емкостные датчики могут измерять перемещения объектов, изготовленных практически из любых материалов, они применяются повсеместно [4]. Принцип действия емкостных ДУП основан на использовании измерения напряжённости электростатического поля плоского конденсатора при изменении зазора между пластинами. Работа емкостных датчиков основывается либо на изменений, геометрии конденсатора (т.е. на изменении расстояния между пластинами), либо на изменении емкости за счет размещения между пластинами различных материалов: электропроводных или диэлектрических. Изменения емкости, как правило, преобразуются в переменный электрический сигнал. Емкостные датчики могут быть однополярными (в их состав входит только один конденсатор), дифференциальными (в их состав входят два конденсатора) или мостовыми (здесь уже используются четыре конденсатора). В случае дифференциальных или мостовых датчиков, один или два конденсатора являются либо постоянными, либо переменными, включенными навстречу друг другу. На рисунке 1.3 показана принципиальная схема однополярного емкостного датчика, в котором одна из пластин конденсатора соединена с центральным проводником коаксиального кабеля, а другой пластиной является сам объект.
Рисунок 1.3- Однополярный емкостной датчик. Отметим, что собственная пластина датчика окружается заземленным экраном, что позволяет улучшать линейность и уменьшать краевые эффекты. Типовой емкостной датчик работает на частотах 3-МГц диапазона и может детектировать перемещения быстро двигающихся объектов. Частотные характеристики такого датчика со встроенным электронным интерфейсом лежат в диапазоне 40 кГц. Емкостные датчики приближения очень эффективны при работе с электропроводными объектами, при этом они измеряют емкость между электродом и самим объектом [4]. Емкостные датчики также достаточно хорошо работают и с непроводящими объектами, но при этом их точность несколько ухудшается. Любой объект, попадающий в окрестность электрода, обладает своими собственными диэлектрическими свойствами, которые изменяют емкость между электродом и корпусом датчика, что в свою очередь, приводит к появлению выходного сигнала, пропорционального расстоянию между объектом и детектором. Для повышения чувствительности и снижения краевых эффектов в однополярном емкостном датчике применяют активное экранирование. При этом экран размещается вокруг нерабочих сторон электрода и на него подается напряжение, равное напряжению на электроде.
Погрешности емкостных датчиков определяются влиянием температуры на геометрические размеры и диэлектрическую проницаемость (в датчиках с твердым и жидким диэлектриком). Эти погрешности могут быть сведены к минимуму соответствующей конструкцией и применением дифференциальных схем. Емкостные датчики имеют низкую разрешающую способность и ряд специфических особенностей, ограничивающих их применение. На рисунке 1.4 показан датчик, состоящий из двух катушек, использующий вихретоковые токи для детектирования приближения объектов из немагнитных, но проводящих материалов [4].
Рисунок 1.4 - Вихретоковый датчик. Одна из катушек является эталонной, а другая - чувствительной, реагирующей на вихретоковые токи, индуцируемые в проводящем объекте. Вихревые (круговые) токи формируют магнитное поле, направленное навстречу полю чувствительной катушки, приводящее к разбалансу между двумя катушками. Чем ближе объект придвигается к катушке, тем больше изменяется магнитное сопротивление.
Преимущества электромагнитных ДУП породили широкое многообразие их схемных и конструктивных исполнений, что зачастую затрудняет выбор при решении задач измерения и контроля угловых перемещений. Для упрощения задачи используют различные виды классификаций. На рисунке 1.5 предложена классификация электромагнитных датчиков.
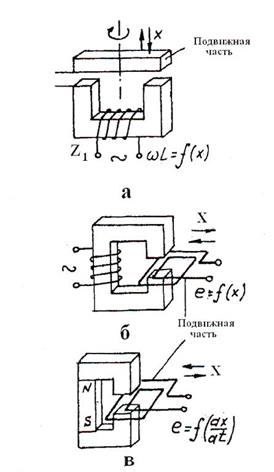
Индуктивные преобразователи нашли широкое распространение в датчиках различных механических величин, измеряемая величина которых предварительно преобразуется в перемещение. Конструкции индуктивных преобразователей перемещений весьма разнообразны, однако они сводятся в основном к пяти разновидностям: преобразователи с переменным числом витков, преобразователи с изменяющейся магнитной проницаемостью, с переменным сопротивлением воздушного зазора, с изменяющимся реактивным магнитным сопротивлением, магнитомодуляционные датчики. Индуктивный преобразователь представляет собой катушку индуктивности, полное сопротивление которой изменяется при взаимном относительном перемещении элементов магнитопровода [1]. Принцип действия индуктивного преобразователя иллюстрируется на рисунке 1.6 а. При перемещении подвижной части магнитопровода (относительно П-образного магнитопровода с обмоткой) изменяется ширина воздушного зазора между подвижной и неподвижной частями магнитопровода. В результате изменяется магнитное сопротивление магнитной цепи и индуктивность обмотки, т.е. индуктивное сопротивление обмотки зависит от перемещения подвижной части. Сопротивление магнитной цепи изменяется и при повороте подвижной части относительно оси.
Рисунок 1.6 - Принцип действия индуктивного, взаимоиндуктивного и индукционного преобразователей. Трансформаторный преобразователь представляет собой трансформатор, у которого под влиянием входного сигнала изменяется взаимная индуктивность, что приводит к изменению вторичного, выходного напряжения. Принцип действия трансформаторного преобразователя поясняет рисунок.1.6 б. В воздушном зазоре С-образного магнитопровода перемещается подвижная обмотка [1]. По мере введения подвижной обмотки в зазор эта обмотка взаимодействует с все большей частью переменного магнитного потока, создаваемого обмоткой на С-образном магнитопроводе). В результате этого ЭДС, создаваемая в подвижной обмотке, зависит от положения подвижной обмотки. В свою очередь взаимоиндуктивные ДУП можно разделить на датчики с переменным зазором, не имеющие механической связи с объектом контроля; датчики соленоидного типа, выходной сигнал которых зависит от положения
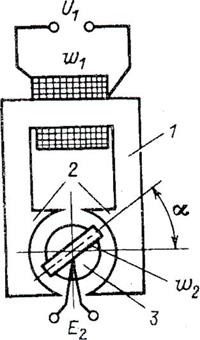
Схема ферродинамического преобразователя угла поворота приведена на рисунке 1.7 [1].
Рисунок 1.7 - Ферродинамический преобразователь угла поворота. Он состоит из П-образного магнитопровода 1 с полюсными наконечниками 2. На магнитопроводе помещена обмотка возбуждения ω1. Вторичная подвижная обмотка ω2 помещена между полюсными наконечниками. Внутри обмотки ω2 для уменьшения магнитного сопротивления вставляется цилиндрический ферромагнитный сердечник 3. Воздушный зазор между сердечником и полюсными наконечниками одинаков, также одинакова в воздушном зазоре и магнитная индукция.
Если преобразователи с меняющимся воздушным зазором используют для измерения перемещений до 10 мм, то для измерения перемещений до 1 м и выше применяют преобразователи с распределенными параметрами [7]. Преобразователи этого типа строят таким образом, чтобы получить достаточно длинные участки с заданным функциональным распределением магнитных или электрических параметров. В измерительной технике чаще всего используют равномерное распределение параметров, при этом рабочий участок характеризуется постоянными значениями удельной проводимости зазоров, удельного числа витков, то есть значениями параметров, приходящим на единицу длины.
На рисунке 1.8 изображен преобразователь с распределенной магнитной проводимостью воздушного промежутка между длинными стержнями и магнитным сопротивлением магнитопровода.
Преобразователь с распределенными параметрами схематично изображен на рисунке 1.9 [7].
Рисунок 1.9 - Схема преобразователя с распределенными электрическими и магнитными параметрами. На П-образном магнитопроводе 1 размещены первичная обмотка 2 и измерительная обмотка 3. Витки измерительной обмотки равномерно распределены вдоль одного из длинных стержней магнитопровода так, что удельное число витков, приходящееся на единицу длины ω, остается постоянным. В воздушном промежутке δ между длинными стержнями перемещается сердечник 4, влияющий на распределение потоков в магнитной цепи преобразователе
Индукционный преобразователь (рисунок 1.6 в) отличается от трансформаторного тем, что магнитный поток в магнитопроводе индукционного преобразователя является постоянным. Поэтому ЭДС в подвижной обмотке появляется лишь при ее перемещении. Индукционные преобразователи служат для преобразования линейной или угловой скорости перемещения катушки относительно магнитного поля ЭДС. Они являются генераторными преобразователями и преобразуют механическую энергию в электрическую [7]. Первую достаточно распространенную группу индукционных преобразователей составляют преобразователи, в которых изменение магнитного потока, сцепляющего с витками катушки, осуществляется либо перемещением последней в магнитном поле постоянного магнита, либо перемещением постоянного магнита относительно неподвижной катушки. Эта группа преобразователей по сути представляет собой генераторы, ЭДС которых пропорциональна скорости линейных (рисунок 1.10 а) или угловых (рис 1.10 б) перемещений катушки в постоянном магнитном поле.
а) б) Рисунок 1.10 - Разновидности индукционных преобразователей. Вторую группу образуют преобразователи, в которых изменение магнитного потока создается изменением магнитного сопротивления. Такой преобразователь можно получить, например, подавая на обмотку возбуждения трансформаторного преобразователя постоянный ток (обмотка подмагничивания), тогда ЭДС, наводимая во вторичной обмотке, будет пропорциональна скорости изменения магнитного сопротивления. В тех случаях, когда величина наводимой ЭДС не является параметром, несущим информацию, могут быть использованы полностью разомкнутые магнитные цепи [7]. Чувствительность преобразователя можно повысить, увеличивая число витков катушки. Однако для преобразователей с подвижной катушкой увеличение числа витков ограничивается размерами воздушного зазора и параметрами нагрузки, а для преобразователей с магнитной цепью - реакцией поля катушки. Реальные преобразователи перемещений обычно выполняется в дифференциальном варианте. При этом уменьшается погрешность преобразования перемещения в электрическую величину и увеличивается линейный участок функции преобразования. Некоторые конструкции дифференциальных индуктивных преобразователей перемещений схематично показаны на рисунке 1.11.
Рисунок 1.11 - Конструкции дифференциальных индуктивных преобразователей перемещений
В конструкции, показанной на рисунке 1.11б, подвижный магнитопровод перемещается между двумя обмотками и влияет на их индуктивные сопротивления. В остальном он действует так же, как и предыдущий. В конструкции, показанной на рисунке 1.11в, действуют два встречных магнитных потока Ф1 и Ф2. Они проходят через подвижную часть магнитопровода. При перемещении подвижной части длина пути, по которому проходит поток Фь увеличивается, а длина пути потока Ф2 - уменьшается. Тогда изменяются магнитные сопротивления обмоток, и выходное напряжение мостовой цепи будет пропорционально перемещению подвижной части. Аналогично строятся и дифференциальные трансформаторные преобразователи перемещений. Среди наиболее распространенных типов электромагнитных датчиков следует назвать следующие: электромагнитные аналого-цифровые ДУП (ЭМ АЦ ДУП) с масочными шкалами; - сельсины и вращающиеся трансформаторы; - редуктосины, многополюсные вращающиеся трансформаторы; - индукционные, экранные АЦ ДУП; - АЦ ДУП с временной модуляцией. Принцип действия электромагнитных АЦ ДУП с масочными шкалами основан на преобразовании углового положения вала в код посредством пространственного кодирования. Наиболее распространён способ кодирования при помощи кодового диска, жёстко связанного с входным валом датчика. В плоскости
Среди электромагнитных АЦ ДУП широкое применение получили сельсины и вращающиеся трансформаторы. Конструктивно эти датчики представляют собой электрическую микромашину переменного тока, содержащую статор и ротор, на котором размещены обмотки. Вывод роторных обмоток, как правило, осуществляется через контактные кольца или с помощью гибких проводников. Сельсином называют информационный микромашинный преобразователь, предназначенный для использования в самосинхронизирующихся синхронных дистанционных передачах, т.е. таких, в которых каждому угловому положению вала датчика соответствует вполне определенное угловое положение вала приемника. Сельсины позволяют получать на выходных обмотках систему напряжений, амплитуда и фаза которых определяются угловым положением ротора (сельсины-датчики СД), или же наоборот, такую систему напряжений преобразовывать в соответствующее ей угловое положение ротора (сельсины-
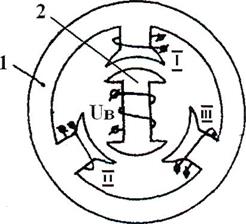
На рисунке 1.12 приведена простейшая схема конструкции сельсина.
Рисунок 1.12- Конструктивная схема сельсина Статор 1 имеет три полюсных выступа, на которых размещены выходные обмотки, расположенные под углом 120°. На двухполюсном роторе 2 сельсина размещена обмотка возбуждения, на которую через контактные кольца (на рисунке не показаны) подается напряжение возбуждения UB. Если питать однофазный ротор сельсина переменным током, то в каждой из обмоток статора сельсина будет наводиться ЭДС той же частоты. Амплитуда этой ЭДС зависит от углового положения ротора по отношению к обмотке статора. Представим эти ЭДС в следующем виде: e1 = Em • sinб • sinщt, e2 = Em • sin(б -120°) • sinщt, e3 = Em • sin(б - 240°) • sinщt, где ω = Iπf - круговая частота питающего напряжения.
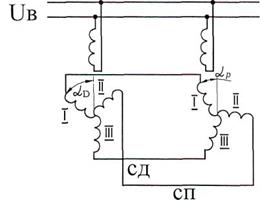
Рисунок 1.13 – Схема индикаторной синхронной передачи
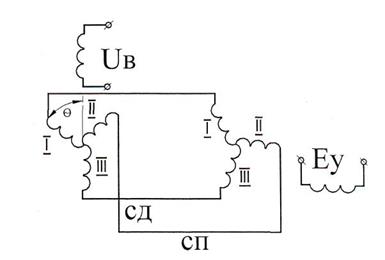
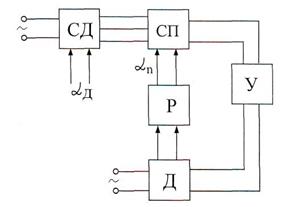
Рисунок 1.14 - Схема трансформаторной синхронной передачи В трансформаторной синхронной передаче (рисунок 1.14) обмотка возбуждения сельсина-датчика подключена к сети переменного тока. Вторичные ЭДС представляют собой электрические сигналы, которые передаются по цепи синхронизации от датчика к приемнику. В приемнике трехфазная обмотка создает магнитный поток, ось которого занимает по отношению к трехфазной обмотке такое же положение, как и у датчика. При повороте ротора датчика на такой же угол поворачивается магнитный поток приемника; этот угол поворота можно зафиксировать по величине ЭДС управляющей обмотки приемника Еу. За согласованное положение датчика и приемника принимают такое положение, когда ЭДС управляющей обмотки равна нулю. ЭДС управляющей обмотки используют после усиления усилителем У для управления реверсивным электродвигателем D, приводящим сельсин-приемник в согласованное положение через редуктор Р (рисунож 1.15). Иногда такого рода систему синхронной передачи называют системой с внешней синхронизацией.
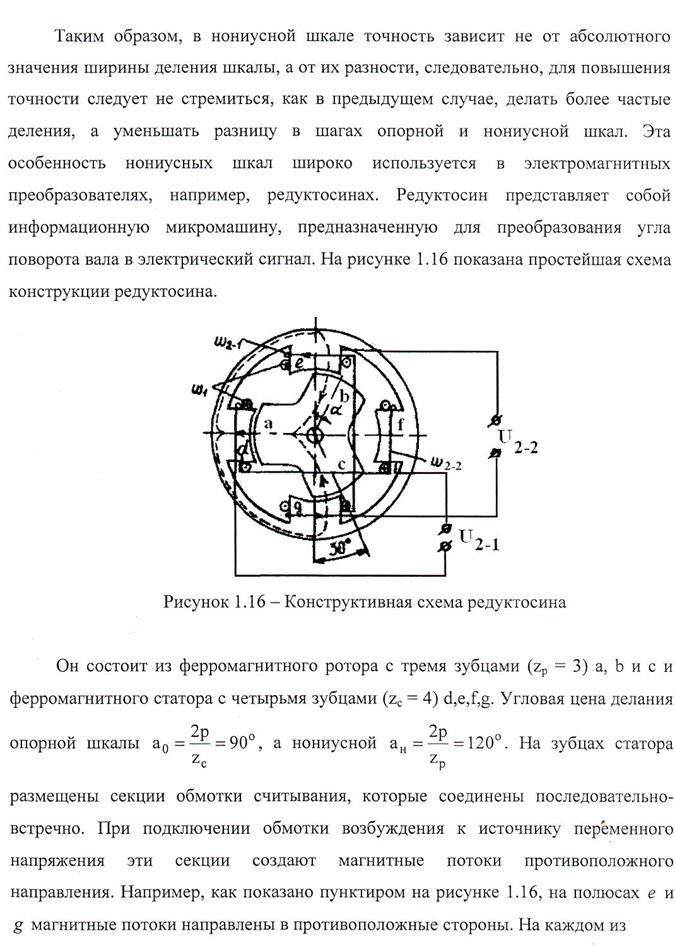
Рисунок 1.15- Система с внешней синхронизацией Вращающийся трансформатор, на роторе которого отсутствуют обмотки, называется редуктосином. Для определения пространственного положения механизмов и элементов систем управления используются измерительные устройства со шкалами. Шкала представляет собой совокупность отметок и других символов соответствующих ряду последовательных значений величины, распределенных по определенному закону, например, миллиметровая шкала на линейке, на которой нанесены деления с шагом Q = 1мм, который называется ценой деления шкалы. Дискретность отсчета в этом случае равна цене деления шкалы d=a. Система зубцов СКВТ также является шкалой. Чтобы повысить точность измерения, т.е. уменьшить дискретность отсчета шкалы, следует, уменьшать шаг делений. Более совершенны нониусные шкалы, которые широко используются в технике, например, в штангенциркуле. Они позволяют повысить точность измерения, не уменьшая цены деления шкалы. Нониус состоит из 2-х шкал: опорной с ценой деления а0 и нониусной с ценой деления ао. Для реализации нониусного сопряжения шкал требуется соблюдение следующих условий: где m и n- целые числа; N - несократимая дробь. Дискретность нониусной шкалы называется разрешающей способностью нониуса. Она выражается через геометрические размеры шкал следующим образом: С = a0 - ан.
<== предыдущая лекция |
| |
следующая лекция ==> |
| | | Выбор рода тока и напряжения |
|
 В электромеханических преобразователях цифровой сигнал получается при помощи электрического контакта чувствительных элементов (щёток) с метками кодирующего устройства или же при замыкании контактов чувствительных элементов выступами кодирующего устройства. Хотя контактный способ обладает низкой разрешающей способностью преобразования и в значительной мере ограничивает допустимую частоту вращения вала, он позволяет создавать самые простые, дешевые и наиболее устойчивые к внешним воздействиям ДУП. Использование скользящих контактов из сплавов, содержащих драгоценные металлы, позволяет повысить частоту вращения вала и увеличить надежность этих устройств.
В электромеханических преобразователях цифровой сигнал получается при помощи электрического контакта чувствительных элементов (щёток) с метками кодирующего устройства или же при замыкании контактов чувствительных элементов выступами кодирующего устройства. Хотя контактный способ обладает низкой разрешающей способностью преобразования и в значительной мере ограничивает допустимую частоту вращения вала, он позволяет создавать самые простые, дешевые и наиболее устойчивые к внешним воздействиям ДУП. Использование скользящих контактов из сплавов, содержащих драгоценные металлы, позволяет повысить частоту вращения вала и увеличить надежность этих устройств.

 устойчивого контакта между движком и обмоткой реостатного преобразователя. При больших скоростях перемещения движка возможна потеря контакта. Это явление особенно свойственно проволочным реостатным преобразователям, контактная дорожка у которых представляет собой волнообразную поверхность. Наличие механических вибраций при работе датчика увеличивает вероятность нарушения контакта. В этом случае имеет место явление «подскока» движка, особенно на резонансных частотах.
устойчивого контакта между движком и обмоткой реостатного преобразователя. При больших скоростях перемещения движка возможна потеря контакта. Это явление особенно свойственно проволочным реостатным преобразователям, контактная дорожка у которых представляет собой волнообразную поверхность. Наличие механических вибраций при работе датчика увеличивает вероятность нарушения контакта. В этом случае имеет место явление «подскока» движка, особенно на резонансных частотах. 3. Низкое быстродействие.
3. Низкое быстродействие. оптическую систему и оптический фильтр к чувствительному элементу. С выхода чувствительного элемента (ЧЭ) связанного через кинематическое звено или оптически с измеряемым объектом, промодулированные измеряемой величиной по одному из параметров, световые лучи воспринимаются считывающим устройством. Далее сформированные оптические сигналы через оптическую среду и оптическую систему попадают на фотоприёмное устройство, где формируются электрические сигналы, пропорциональные измеряемой величине. Электрические сигналы подвергаются обработке в электронном узле и поступают в выходное устройство. Выходная информация может представлять собой аналоговый электрический сигнал, цифровой или какой-нибудь другой код, разовые команды в зависимости от назначения и характера работы потребителя измерительной информации.
оптическую систему и оптический фильтр к чувствительному элементу. С выхода чувствительного элемента (ЧЭ) связанного через кинематическое звено или оптически с измеряемым объектом, промодулированные измеряемой величиной по одному из параметров, световые лучи воспринимаются считывающим устройством. Далее сформированные оптические сигналы через оптическую среду и оптическую систему попадают на фотоприёмное устройство, где формируются электрические сигналы, пропорциональные измеряемой величине. Электрические сигналы подвергаются обработке в электронном узле и поступают в выходное устройство. Выходная информация может представлять собой аналоговый электрический сигнал, цифровой или какой-нибудь другой код, разовые команды в зависимости от назначения и характера работы потребителя измерительной информации.
 единицу интенсивности магнитного поля и на единицу плотности тока.
единицу интенсивности магнитного поля и на единицу плотности тока.
 Поскольку напряжения на экране и электроде имеют одинаковые амплитуды и фазы, между ними нет электрического поля, и все компоненты, расположенные за экраном не оказывают никакого влияния на работу датчика.
Поскольку напряжения на экране и электроде имеют одинаковые амплитуды и фазы, между ними нет электрического поля, и все компоненты, расположенные за экраном не оказывают никакого влияния на работу датчика.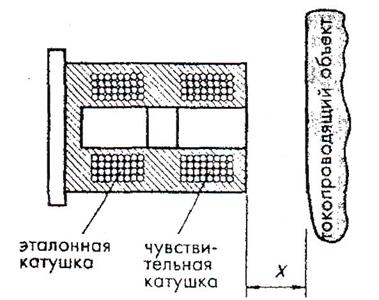
 связи между цепями питания и измерительными цепями, достаточно высокая точность измерений, простота в изготовлении и эксплуатации.
связи между цепями питания и измерительными цепями, достаточно высокая точность измерений, простота в изготовлении и эксплуатации.
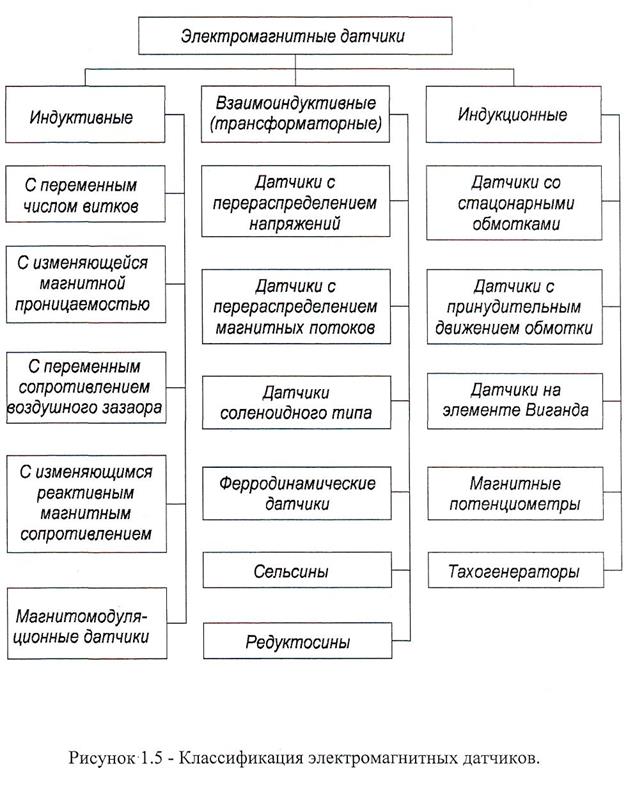
 По принципу преобразования все электромагнитные датчики делятся на индукционные, индуктивные, взаимоиндуктивные (трансформаторные) и вихретоковые. Наибольший интерес представляют взаимоиндуктивные датчики, отличающиеся гальванически развязанными цепями питания и измерительными цепями, большей помехоустойчивостью, лучшей линейностью выходной характеристики и более высокими метрологическими показателями. Такие преимущества сделали их наиболее распространёнными среди всех электромагнитных ДУП.
По принципу преобразования все электромагнитные датчики делятся на индукционные, индуктивные, взаимоиндуктивные (трансформаторные) и вихретоковые. Наибольший интерес представляют взаимоиндуктивные датчики, отличающиеся гальванически развязанными цепями питания и измерительными цепями, большей помехоустойчивостью, лучшей линейностью выходной характеристики и более высокими метрологическими показателями. Такие преимущества сделали их наиболее распространёнными среди всех электромагнитных ДУП.
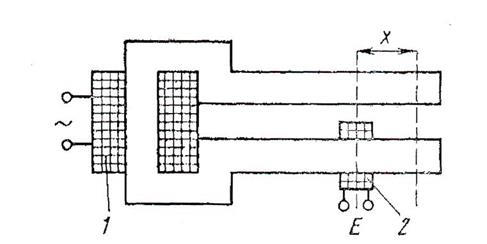
 На катушку возбуждения 1 подается напряжение переменного тока. Магнитный поток Ф, создаваемый МДС катушки 1, замыкается через воздушный промежуток между стержнями преобразователя, причем на участке 0 - х с постоянной удельной магнитной проводимостью зазора индукция в зазоре постоянна. Магнитный поток вдоль стержней уменьшается по линейному закону от максимального значения до минимального значения. В зависимости от положения х подвижной катушки 2 величина потокосцепления меняется также линейно, что приводит к линейному изменению ЭДС, наводимой в ней.
На катушку возбуждения 1 подается напряжение переменного тока. Магнитный поток Ф, создаваемый МДС катушки 1, замыкается через воздушный промежуток между стержнями преобразователя, причем на участке 0 - х с постоянной удельной магнитной проводимостью зазора индукция в зазоре постоянна. Магнитный поток вдоль стержней уменьшается по линейному закону от максимального значения до минимального значения. В зависимости от положения х подвижной катушки 2 величина потокосцепления меняется также линейно, что приводит к линейному изменению ЭДС, наводимой в ней.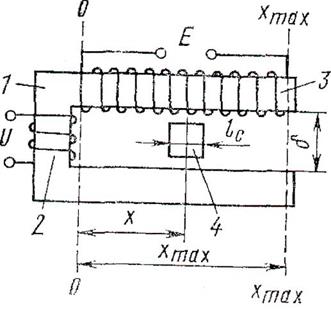
 Индукционным преобразователем называется преобразователь, принцип действия которого основан на законе электромагнитной индукции. Преобразователь имеет катушку. При воздействии входной величины на преобразователь изменяется потокосцепление катушки с внешним по отношению к катушке магнитном полем. При этом в катушке наводится ЭДС.
Индукционным преобразователем называется преобразователь, принцип действия которого основан на законе электромагнитной индукции. Преобразователь имеет катушку. При воздействии входной величины на преобразователь изменяется потокосцепление катушки с внешним по отношению к катушке магнитном полем. При этом в катушке наводится ЭДС.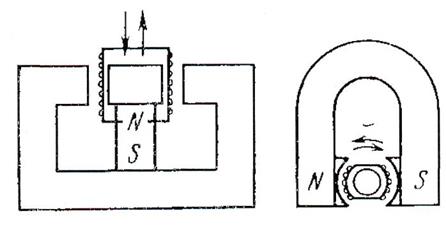
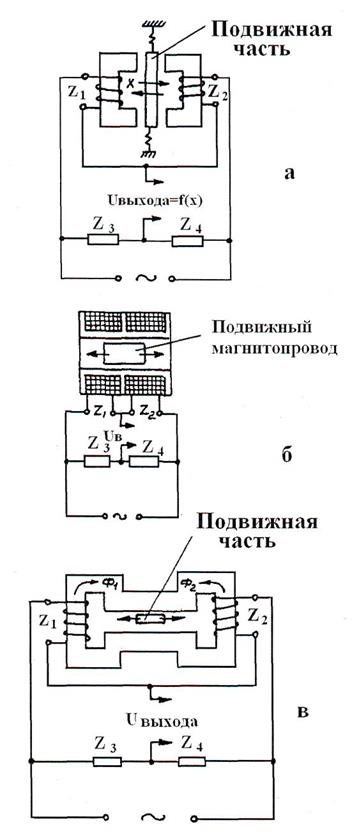
 На рисунке 1.11а изображен дифференциальный вариант преобразователя, одноконтурный вариант которого показан на рисунке 1.5а. При перемещении подвижной части магнитопровода один из зазоров уменьшается, а другой на столько же увеличивается. Это приводит к увеличению индуктивного сопротивления в одной из обмоток и уменьшению в другой. Обмотки включены в мостовую цепь, выходное напряжение которой пропорционально механическому перемещению подвижной части.
На рисунке 1.11а изображен дифференциальный вариант преобразователя, одноконтурный вариант которого показан на рисунке 1.5а. При перемещении подвижной части магнитопровода один из зазоров уменьшается, а другой на столько же увеличивается. Это приводит к увеличению индуктивного сопротивления в одной из обмоток и уменьшению в другой. Обмотки включены в мостовую цепь, выходное напряжение которой пропорционально механическому перемещению подвижной части. диска концентрично расположены кодовые дорожки. В широко известных схемах датчиков число дорожек равно числу двоичных разрядов цифрового кода. На кодовых дорожках расположены метки (кванты). Длина меток на дорожке каждого из разрядов определяется "весом" данного разряда. Наличие меток соответствует единицам, а отсутствие - нулям кода и наоборот. Совокупность кодовых дорожек образует кодовую маску датчика. В корпусе датчика напротив дорожек на неподвижной, относительно кодового диска линии считывания кода, расположены ЧЭ. По сравнению с датчиками накапливающего типа масочные ЭМ АЦ ДУП имеют ряд положительных качеств. К ним в первую очередь следует отнести независимость результата преобразования от предыдущего положения кодового диска, отсутствие возможности накопления ошибок, независимость результата от пропадания напряжения питания и сравнительную простоту выполнения электронной схемы, обусловленную тем, что логика преобразования заложена в кодовой маске. Среди недостатков следует, прежде всего, назвать низкую разрешающую способность (8-9 дв. разрядов) и значительную технологическую сложность изготовления кодовых масок.
диска концентрично расположены кодовые дорожки. В широко известных схемах датчиков число дорожек равно числу двоичных разрядов цифрового кода. На кодовых дорожках расположены метки (кванты). Длина меток на дорожке каждого из разрядов определяется "весом" данного разряда. Наличие меток соответствует единицам, а отсутствие - нулям кода и наоборот. Совокупность кодовых дорожек образует кодовую маску датчика. В корпусе датчика напротив дорожек на неподвижной, относительно кодового диска линии считывания кода, расположены ЧЭ. По сравнению с датчиками накапливающего типа масочные ЭМ АЦ ДУП имеют ряд положительных качеств. К ним в первую очередь следует отнести независимость результата преобразования от предыдущего положения кодового диска, отсутствие возможности накопления ошибок, независимость результата от пропадания напряжения питания и сравнительную простоту выполнения электронной схемы, обусловленную тем, что логика преобразования заложена в кодовой маске. Среди недостатков следует, прежде всего, назвать низкую разрешающую способность (8-9 дв. разрядов) и значительную технологическую сложность изготовления кодовых масок. приемники СП индикаторные) или в напряжение, фаза и амплитуда которого является функцией системы входных напряжений и угла поворота ротора (сельсины-приемники трансформаторные). Сельсины применяются в качестве измерителей рассогласования следящих систем, датчиков и приемников трансформаторных и индикаторных систем дистанционных передач.
приемники СП индикаторные) или в напряжение, фаза и амплитуда которого является функцией системы входных напряжений и угла поворота ротора (сельсины-приемники трансформаторные). Сельсины применяются в качестве измерителей рассогласования следящих систем, датчиков и приемников трансформаторных и индикаторных систем дистанционных передач.