ИССЛЕДОВАНИЕ СИСТЕМЫ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ МЕТОДОМ ФАЗОВЫХ ТРАЕКТОРИЙПри розрахунку арматури для фундаменту за розрахункові приймаємо згинаючі моменти по перерізам, що відповідають виступам фундаменту як для консолі з защемленим кінцем:
Підбір арматури в одному напрямку:
Приймаємо нестандартну сітку із арматури
Відсоток армування:
ИССЛЕДОВАНИЕ СИСТЕМЫ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ МЕТОДОМ ФАЗОВЫХ ТРАЕКТОРИЙ Метод фазовых траекторий является одним из методов теории автоматического управления, который широко используется для исследования нелинейных динамических систем. При выборе координатного базиса в методе фазовых траекторий исходят из того, что состояние динамической системы с одной управляемой переменной x 1 в общем случае может быть описано с помощью следующего набора переменных состояния: x = (x 1, x 2, …, xn), где Тогда свободное движение нелинейной системы управления можно описать системой n дифференциальных уравнений первого порядка:
где f (x) = (x 2, x 3, …, x n, F (x)), F (x) – нелинейная функция. Метод фазовых траекторий наиболее удобен для анализа систем второго порядка, так как фазовые траектории, расположенные в фазовой плоскости переменных x 1 и x 2, имеют понятное графическое отображение. Для n = 2 уравнения примут более простой вид:
Разделив второе уравнение на первое, получим уравнение фазовой траектории:
На основе полученных уравнений можно сформулировать ряд правил, определяющих направление движения по фазовым траекториям и некоторые их особенности, что проиллюстрировано на рис. 1: · В верхней полуплоскости, так как x 2 > 0, движение направлено в сторону увеличения x 1, а в нижней полуплоскости, наоборот, – в сторону уменьшения (переменная x 2, а с ней и производная x 1, имеют отрицательные значения). · В точках пересечения траекторий с осью абсцисс переменная x 1 достигает своих локальных максимумов или минимумов, так как производная dx 1/ dt в этих точках равна нулю; касательные к траектории в точках пересечения расположены к оси абсцисс под прямыми углами. · Точки равновесного состояния системы (стационарные точки) определяются нулевыми значениями производных переменных состояния dx 1/ dt = 0, dx 2/ dt = 0, следовательно, в этих точках x 2 = 0, F (x 1, x 2) = 0. · Точкам, в которых нелинейная функция F (x 1, x 2) не является непрерывной и гладкой, соответствуют изломы фазовых траекторий. Таким образом, фазовая плоскость разбивается на несколько областей с различными гладкими фазовыми траекториями. Линии, отделяющие на плоскости одну область от другой, называются линиями переключения.
Рис. 1. Фазовая траектория нелинейной системы управления Основные свойства фазовых траекторий, существенные для анализа поведения нелинейных систем, состоят в следующем: · Неустойчивому движению соответствует траектория, удаляющаяся от точки равновесия. · Монотонный процесс изображается на фазовой плоскости в виде кривой, монотонно приближающейся к положению равновесия или удаляющейся от него. · Колебательный процесс изображается на фазовой плоскости в виде спиралевидной кривой. · Изолированная замкнутая траектория, называемая предельным циклом, соответствует периодическому движению. Физический смысл устойчивого периодического движения – автоколебания системы, происходящие при отсутствии внешнего периодического воздействия. · Специфическим для систем управления является скользящий режим, при котором на линиях излома фазовых траекторий происходят столь частые переключения, что процесс перехода с одной траектории на другую приводит к движению вдоль самой линии излома. Представление моделей блок-схемами Для описания большинства нелинейных систем достаточно воспользоваться следующим набором блоков: сумматор, усилитель, интегратор, нелинейный элемент и источник внешнего воздействия (рис. 2). В некоторых случаях к ним приходится добавлять элемент дифференцирования.
Рис. 2. Основные элементы блок-схем нелинейных систем: Свойства этих блоков определяются следующими выражениями: y (t) = u (t) – функция внешнего воздействия; y (t) = u 1(t) ± u 2(t) – функция сумматора; y (t) = ku (t) – функция усилителя;
y (t) = f (u (t)) – функция нелинейного элемента, где f () – нелинейная функция. В качестве примера рассмотрим нелинейную систему автоматического регулирования, уравнения динамики которой имеют вид:
Для перехода к базису фазовых переменных состояния введем фазовые координаты x 1 = y, x 2 = dx 1/ dt. Тогда исходную систему уравнений можно преобразовать к стандартной форме:
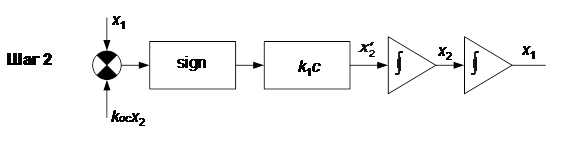
Последовательность шагов построения блок-схемы по системе уравнений состояния показана на рис. 3.
Рис.3. Последовательность шагов построения блок-схемы
|






 16А400С з комірками 20×20см,
16А400С з комірками 20×20см, в одному напрямку.
в одному напрямку.


 …,
…, 
 ,
,



 – функция интегратора;
– функция интегратора;