
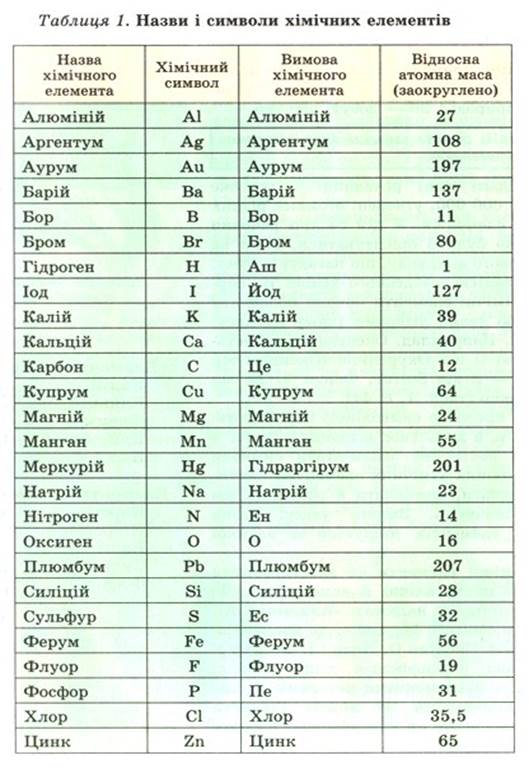
Аннотация. Хімічний елемент – це вид атомів з певним зарядом ядра.Хімічний елемент – це вид атомів з певним зарядом ядра. Кожний хімічний елемент має свою назву. Так, різновид атомів із зарядом ядра +1 названо елементом Гідрогеном. Різновид атомів із зарядом ядра +2 – це елемент Гелій. Сучасні українські назви елементів походять від латинських назв. Пишуться вони з великої літери.
РАЗРАБОТКА И ИССЛЕДОВАНИЕ НЕЙРО-НЕЧЕТКОГО РЕГУЛЯТОРА ДЛЯ ПРОТИВОБУКСОВОЧНОЙ СИСТЕМЫ (ПБС) ГРУЗОВОГО АВТОМОБИЛЯ Хайрутдинова Г.В. ФГАОУ ВПО Казанский (Приволжский) федеральный университет, e-mail: [email protected] поступила в редакцию хх месяца 2014 года Аннотация В данной работе представлена цифровая модель противобуксовчной системой с использованием нейро-нечеткого регулятора. В теории управления особое внимание всегда уделялось проблеме синтеза математических моделей и алгоритмов управления при недостаточой информации об объекте управления и действующих на него полезных сигналов и помех. Этот интерес усилился в последнее время в связи с изучением слабо формализованных сложных систем и разработкой принципов и алгоритмов управления этими системами. Для технических систем со случайным характером возмущающего воздействия, сложностью разработки динамической модели, ее высоким порядком и нелинейным характером, можно говорить о проблеме управления в условиях неопределенности. Использование нечетких регуляторов, обеспечивает грубость и стабильную сходимость процессов, поэтому такой подход следует считать целесообразным. Для выявления эффекта буксования в данной работе анализируется разность угловых скоростей ведущих колес автомобиля и для того чтобы устранить буксование на буксующем колесе будет уменьшаться подача передаваемого от двигателя крутящего момента. Ключевые слова: противобуксовочная система, пробуксовка, прямолинейное движение автомобиля, ведущие колеса, ведомые колеса, нейро-нечеткий регулятор.
Введение. Особый интерес в области машиностроения представляют системы, оптимизирующие скольжение или буксование автомобильной шины. Известными отрицательными последствиями длительного буксования являются ухудшение динамики разгона транспортного средства, повышение вероятности потери курсовой и траекторной устойчивости движения при разгоне, интенсивный износ шин, ухудшение проходимости, увеличение расхода топлива и, как следствие, выбросов вредных веществ в атмосферу с отработавшими газами. Противобуксовочные системы призваны улучшить сцепление шины с дорогой. Данная система постоянно отслеживает характер вращения ведущих колес, и, взаимодействуя с другими системами автомобиля, предотвращает их пробуксовку при возникновении критической ситуации. Создание и внедрение противобуксовочной системы на автомобиле ставит его в преимущественное положение перед аналогом, не оснащенным подобной системой. И дело даже не в улучшении проходимости и разгонной динамики. Для большинства транспортных средств, которые принято называть коммерческими, то есть не предназначенными для индивидуального пользования, эти качества не носят принципиального характера. Противобуксовочная система создает целый ряд дополнительных преимуществ, таких как, например, уменьшение затрат на топливо, экономия на износе шин, уменьшение количества вредных веществ, выбрасываемых с выхлопными газами двигателей внутреннего сгорания и т.п.
Основная часть. При составлении модели системы внешних сил и моментов, действующих на автомобиль при прямолинейном движении, примем следующие допущения: - левые и правые колеса одноименных мостов имеют одинаковые нагрузки; - конфигурация автомобиля изображается в виде плоской фигуры; - опорная поверхность дороги представляется в виде прямой линии, наклоненной под малым углом к горизонту; - аэродинамическое сопротивление отсутствует; - упругие свойства подвески не учитываются и колебания кузова не происходят. Рассмотрим прямолинейное движение автомобиля (рис. 1).
Рис. 1 – Воздействия на автомобиль при прямолинейном движении Составим уравнение движения автомобиля:
где:
Рассмотрим колесо, катящееся по гладкой горизонтальной поверхности дороги с твердым покрытием в ведущем режиме (рис. 2).
Рис. 2 - Система сил и моментов, действующих на ведущее колесо при движении Составим общее уравнение динамики, согласно которому алгебраическая сумма работ всех внешних сил, приложенных к системе, равна нулю.
Рассмотрим колесо, катящееся по недеформируемой поверхности (рис. 3) в ведомом режиме.
Рис. 3 – Система сил и моментов, действующих на ведомое колесо при движении Составим общее уравнение динамики ведомого колеса аналогично случаю ведущего колеса. Получим:
На основании, описанной выше, математической модели, создадим модель прямолинейного движения автомобиля в Matlab Simulink (рис 4).
Рис. 4- Модель прямолинейного движения автомобиля в Matlab Simulink Подсистема «Wheels», построенная на основании формул (1) и (2), предназначена для расчета угловых скоростей колес правой и левой колеи автомобиля. Подсистема «X Reactions» предназначена для расчета продольных реакций дороги. Подсистема «Norm Reactions» предназначена для расчета нормальных реакций дороги Подсистема «Moments of resistance» предназначена для расчета моментов сопротивления качению. Подсистема «Speed of c.m.», предназначена для расчета скорости центра масс колей автомобиля. Для выявления эффекта буксования будем анализировать разность угловых скоростей ведущих колес автомобиля. Пусть при превышении этой разности некоторого значения одно из колес начинает буксовать и для того чтобы устранить буксование на этом колесе необходимо уменьшить подачу передаваемого от двигателя крутящего момента. На вход нечеткого регулятора (рис. 5) подается разность (w) угловых скоростей правого и левого ведущего колеса автомобиля. Нечеткий регулятор имеет два выхода: - момент, подводимый к левому колесу от двигателя через трансмиссию (Mkl); - момент, подводимый к правому колесу от двигателя через трансмиссию (Mkr).
Рис.5- Нечеткий регулятор для ПБС Диапазоны изменений значений термов для входных и выходных данных были установлены на основании исследовании построенной модели движения автомобиля. Входная переменная имеет 5 термов, рассматривающих следующие соотношения угловых скоростей ведущих колес: - угловая скорость левого ведущего колеса намного больше угловой скорости правого колеса (L>>R); - угловая скорость левого ведущего колеса больше угловой скорости правого колеса (L>R); - угловая скорость левого ведущего колеса приблизительно равна угловой скорости правого колеса (L~R); - угловая скорость правого ведущего колеса больше угловой скорости левого колеса (L<R); - угловая скорость правого ведущего колеса намного больше угловой скорости левого колеса(L<<R).
Рис.6- Графики функций принадлежности термов лингвистической переменной «W» Выходные переменные имеют по 3 терма: - none; - low; - middle.
Рис.7- Графики функций принадлежности термов лингвистических переменных«Mkl» и «Mkr» Нечеткие правила имеют следующий вид:
Рис.8- Нечеткие правила Для проведения ряда экспериментов был выбран бортовой КАМАЗ-4308-Н3 (4х2) [7]. Примем следующие параметры: - масса автомобиля - ускорение свободного падения - приведенный к ведущему колесу суммарный момент инерции колеса, двигателя и трансмиссии Так же для упрощения вычислений, будем считать, что: - автомобиль движется с небольшой скоростью; - деформация колеса при качении невелика ( - коэффициент сопротивления качению является постоянной величиной - передаваемый от двигателя крутящий момент Для первого эксперимента, при прочих равных условиях, возьмем коэффициент сцепления
Рис.9 - Коэффициент сцепления для правого колеса
Т.е. предполагаем, что правое колесо черех ~6 секунд после начала движения попадает на обледенелый участок дороги и начинает буксовать. Угловые скорости правого (синяя линия) и левого(зеленая линия) колеса до и после применения ПБС представлены ниже:
Рис.10- Без использования ПБС
Рис. 11 - После применения ПБС Для второго эксперимента, при прочих равных условиях, возьмем коэффициент сцепления
Рис.12 - Коэффициентт сцепления для левого колеса Угловые скорости левого(зеленая линия) и правого (синяя линия) колеса:
Рис.13- Без использования ПБС
Рис. 14 - После применения ПБС
Заключение. В результате выполнения курсовой работы были успешно решены следующие задачи: - составлена математическая модель движения ведущих колес; - разработан нечеткий регулятор для противобуксовочной системы; - было проведено исследование построенной модели. Главным достоинством данной модели является её простота. Так как в начальных условиях мы приняли, что автомобиль движется с небольшой скоростью по гладкой горизонтальной дороге. Благодарность. Выражаю благодарность Асанову А.З. и Демьянову Д.Н. в подготовке к публикации данной работы. Список литературы. 1) Тарасик В.П. Теория я движения автомобиля: Учебник для вузов / В.П. Тарасик. – СПб.: БВХ-Петербург, 2006. – 478 с.: ил. 2) Смирнов Г. А. Теория движения колесных машин: Учеб. для студентов машиностроит. спец. Вузов. – 2-е изд., доп. и перераб. / Г. А. Смирнов. – М.: Машиностроение, 1990. —352 с: ил. 3) Подригало М. А., Клец Д. М., Назарько О. А. ДИНАМИКА ОДИНОЧНОГО КОЛЕСА АВТОМОБИЛЯ ПРИ СРЫВЕ В ПОЛНОЕ БУКСОВАНИЕ. Научная статья журнала «Автомобильный транспорт» - Харьков: ХНАДУ. – 2010, №26 URL: http://cyberleninka.ru/article/n/dinamika-odinochnogo-kolesa-avtomobilya-pri-sryve-v-polnoe-buksovanie/ (дата обращения 02.12.1013). 4) OAO «КАМАЗ» URL:http://www.kamaz.ru/ru/vehicle/cars/chassis/4308n3/ (дата обращения 15.05.1014).
|

 ,
, - скорость автомобиля вдоль горизонтальной оси;
- скорость автомобиля вдоль горизонтальной оси; - горизонтальные реакции опорной поверхности дороги.
- горизонтальные реакции опорной поверхности дороги.
 (1)
(1)
 (2)
(2)




 ;
;

 ) и радиус качения не меняется с течением времени;
) и радиус качения не меняется с течением времени; табл. 2 (прил. А);
табл. 2 (прил. А); 100 Н*м.
100 Н*м. 0.8 для левого колеса, а для правого представлен на рисунке ниже:
0.8 для левого колеса, а для правого представлен на рисунке ниже:


 для правого колеса, а для левого представлен на рисунке ниже:
для правого колеса, а для левого представлен на рисунке ниже:





