В силовых гироскопических системах вредное влияние внешней нагрузки устраняется тем, что к гироскопу прикладывается искусственно создаваемый стабилизирующий момент, уравновешивающий момент нагрузки.

Р ис. 5.1. Схема однокомпонентного силового гироскопа
В однокомпонентном силовом гироскопе (рис. 5.1) обеспечивается силовая стабилизация относительно оси внешней рамки подвеса гироскопа. Стабилизирующий момент относительно оси внешней рамки подвеса гироскопа создается системой стабилизации, состоящей из датчика стабилизирующего сигнала  усилителя
усилителя  и стабилизирующего или разгрузочного мотора
и стабилизирующего или разгрузочного мотора  .
.
Допустим, что относительно оси внешней рамки подвеса гироскопа действует момент нагрузки Мн • Согласно закону _прецессии под влиянием момента Мн гироскоп начинает прецессировать так, что его ось (точнее, вектор кинетического момента К) будет приближаться к вектору момента  кратчайшим путем, вращаясь вокруг оси внутренней рамки подвеса (оси х). При этом в датчике стабилизирующего сигнала формируется сигнал, который через усилитель Уp поступает на стабилизирующий мотор Мр. С помощью стабилизирующего мотора создается стабилизирующий момент Мр относительно оси внешней рамки подвеса гироскопа. Направление стабилизирующего момента зависит от знака стабилизирующего сигнала (а следовательно, от направления прецессии гироскопа, вызванной моментом нагрузки) и всегда противоположно направлению момента нагрузки.
кратчайшим путем, вращаясь вокруг оси внутренней рамки подвеса (оси х). При этом в датчике стабилизирующего сигнала формируется сигнал, который через усилитель Уp поступает на стабилизирующий мотор Мр. С помощью стабилизирующего мотора создается стабилизирующий момент Мр относительно оси внешней рамки подвеса гироскопа. Направление стабилизирующего момента зависит от знака стабилизирующего сигнала (а следовательно, от направления прецессии гироскопа, вызванной моментом нагрузки) и всегда противоположно направлению момента нагрузки.
Ось, относительно которой обеспечивается силовая стабилизация, называют осью чувствительности. Ось, относительно которой, прецессирует гироскоп и снимается стабилизирующий сигнал, называют осью прецессии. В рассмотренной схеме (рис. 5.1) осью чувствительности является ось внешней рамки подвеса гироскопа, а осью прецессии - ось внутренней рамки.
Исследуем, как влияет на положение оси силового гироскопа вращение его основания, с которым связана система отсчета  , вокруг оси прецессии. Обозначим
, вокруг оси прецессии. Обозначим  угловую скорость вращения основания гироскопа вокруг оси прецессии (рис. 5.1). Вместе с основанием будет вращаться и внешняя рамка подвеса. Внутренняя рамка будет удерживаться гироскопом, стремящимся сохранить неизменное направление своей оси в пространстве. Вследствие этого появится рассогласование и образуется сигнал, воздействующий на стабилизирующий.двигатель . В результате к гироскопу будет приложен разгрузочный момент относительно оси чувствительности
угловую скорость вращения основания гироскопа вокруг оси прецессии (рис. 5.1). Вместе с основанием будет вращаться и внешняя рамка подвеса. Внутренняя рамка будет удерживаться гироскопом, стремящимся сохранить неизменное направление своей оси в пространстве. Вследствие этого появится рассогласование и образуется сигнал, воздействующий на стабилизирующий.двигатель . В результате к гироскопу будет приложен разгрузочный момент относительно оси чувствительности  . Разгрузочный момент вызовет прецессию гироскопа, что приведет к вращению оси гироскопа за его основанием.
. Разгрузочный момент вызовет прецессию гироскопа, что приведет к вращению оси гироскопа за его основанием.
Однокомпонентный силовой гироскоп с коррекцией. Чтобы получить однокомпонентную силовую гироскопическую вертикаль необходимо плоскость внешней рамки подвеса гироскопа установить в вертикальное положение. При этом датчик сигнала коррекции  связывается с осью чувствительности, а коррекционный мотор коррекции
связывается с осью чувствительности, а коррекционный мотор коррекции  с осью прецессии силового гироскопа (рис. 5.2). В.результате создается коррекционный момент относительно оси прецессии. Под действием этого момента гироскоп, прецессируя, заставляет вращаться внешнюю рамку вокруг оси чувствительности и устанавливает ее в требуемое положение (рис. 5.2). При отклонении плоскости внешней рамки подвеса гироскопа от вертикального положения в маятниковом датчике образуется сигнал коррекции, воздействующий через усилитель Ук на мотор коррекции (рис. 5.2).
с осью прецессии силового гироскопа (рис. 5.2). В.результате создается коррекционный момент относительно оси прецессии. Под действием этого момента гироскоп, прецессируя, заставляет вращаться внешнюю рамку вокруг оси чувствительности и устанавливает ее в требуемое положение (рис. 5.2). При отклонении плоскости внешней рамки подвеса гироскопа от вертикального положения в маятниковом датчике образуется сигнал коррекции, воздействующий через усилитель Ук на мотор коррекции (рис. 5.2).
В результате относительно оси прецессии гироскопа будет создан коррекционный момент . Под действием коррекционного момента гироскоп прецессирует так, что вектор кинетического момента  стремится совместиться с вектором коррекционного момента.
стремится совместиться с вектором коррекционного момента.
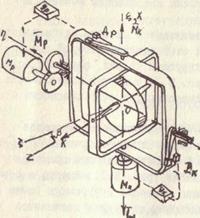
Рис. 5.2. Схема однокомпонентного силового гироскопа с маятниковой коррекцией
При этом внешняя рамка подвеса гироскопа, вращаясь вокруг оси чувствительности , устанавливается в вертикальное положение.
При отсутствии коррекционного момента  внешний момент
внешний момент  действующий относительно оси чувствительности гироскопа , уравновешивается стабилизирующим моментом
действующий относительно оси чувствительности гироскопа , уравновешивается стабилизирующим моментом  . Если относительно оси прецессии х приложить коррекционный момент , то под действием этого момента внутренняя рамка подвеса гироскопа повернется вокруг оси х. В результате изменится угол
. Если относительно оси прецессии х приложить коррекционный момент , то под действием этого момента внутренняя рамка подвеса гироскопа повернется вокруг оси х. В результате изменится угол  , равновесие моментов относительно оси нарушится, и гироскоп начнет вращаться вокруг оси чувствительности . При этом коррекционный момент будет постепенно убывать. Когда внешняя рамка подвеса гироскопа придет в требуемое положение, коррекционный момент обратится в нуль, равновесие моментов относительно оси чувствительности восстановится, и вращение гироскопа вокруг этой оси прекратится.
, равновесие моментов относительно оси нарушится, и гироскоп начнет вращаться вокруг оси чувствительности . При этом коррекционный момент будет постепенно убывать. Когда внешняя рамка подвеса гироскопа придет в требуемое положение, коррекционный момент обратится в нуль, равновесие моментов относительно оси чувствительности восстановится, и вращение гироскопа вокруг этой оси прекратится.
Двухкомпонентная гироскопическая платформа
Одна из возможных схем двухкомпонентной платформы приведена на рис. 5.3. Рассмотрим эту схему.
Нa платформе Р установлено два двухстепенных гироскопа  , Платформа имеет две степени свободы относительно осей
, Платформа имеет две степени свободы относительно осей  , и
, и  которые одновременно являются осями чувствительности гироскопов. Оси
которые одновременно являются осями чувствительности гироскопов. Оси  , и
, и  являются осями прецессии гироскопов (рис. 5,3). Гироскоп управляет стабилизирующим мотором и обеспечивает стабилизацию платформы относительно оси
являются осями прецессии гироскопов (рис. 5,3). Гироскоп управляет стабилизирующим мотором и обеспечивает стабилизацию платформы относительно оси  . Таким образом, совокупность двух силовых гироскопов обеспечивает стабилизацию платформы Р относительно.двух взаимно перпендикулярных осей и .
. Таким образом, совокупность двух силовых гироскопов обеспечивает стабилизацию платформы Р относительно.двух взаимно перпендикулярных осей и . 
Рис. 5.3. Схема двухкомпонентной гироплатформы
С помощью маятниковой коррекции можно обеспечить горизонтальное положение платформы. Один маятник системы коррекции должен быть связан с осью , а второй - с осью . Коррекционные моменты должны создаваться относительно осей и  .
.




