Направляющие качения и примеры их примененияНаправляющие качения представляют собой сочетание роликовых опор в сопряжении с термически обработанными стальными накладными планками из цементуемой стали типа 20Х (ГОСТ 4543—71) с последующей закалкой до твердости НRCэ 59—63.
Рис. 12 – Роликовая опора Р88
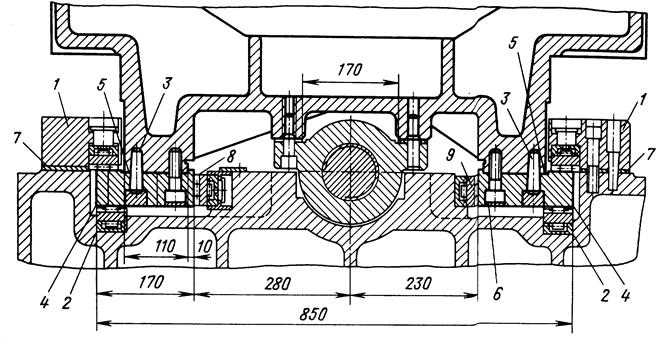
Обеспечивают при весьма малом коэффициенте трения μ≈0,005 точные перемещения при реверсах, равномерное перемещение при низких и высоких скоростях. Эти свойства обеспечивают с высокой точностью повторяемость выхода на позицию, что особенно важно для многооперационных станков, возможность уменьшения мощности двигателей приводов подач, стабильные повышенные точность и долговечность. Роликовые опоры в виде танкетки изготовляют как унифицированную гамму серий Р-88У и Р-88Ш. Опоры серии Ш унифицированы с опорами серии У по длине и высоте, различаются шириной корпуса и длиной роликов. Комплект роликовой опоры (танкетки) Р-88 (рисунок 12) состоит из обойм 1 (2 шт.), роликов диаметром d (36 шт.), направляющей 2, крепежных винтов 3 (4 шт.), штифтов 4 (4 шт.), сепараторов 5. Роликовые опоры разделяют на жесткие опоры 3 (рисунок 14, а), закрепляемые винтами 2, и поджимные (с упругим натягом) (рисунок 14, б); их монтируют по одной, две или три на специальных платформах 1 (см. рисунок 14, а), называемых также монтажными подушками. Число танкеток зависит от нагрузки и длины хода. В поджимных роликовых опорах обоймы 1 (см. рисунок 14, б) танкеток скрепляются винтами 3 с направляющей подушкой 2. С противоположной стороны устанавливают палец 7, бурт которого одной стороной упирается в направляющую подушку 2 обоймы и соединяется с ней винтами 6, а другой — опирается на тарельчатые пружины 8. Тарельчатые пружины поджимают специальным гайками 10, создавая необходимый натяг. На торце монтажной подушки устанавливают крепежную пластину 5 с войлочным стирателем 4. Рабочие поверхности (образующие) роликовых опор качения должны быть строго параллельны плоскости платформы. Опору качения через канал 9 перед установкой набивают смазкой ЦИАТИМ-201 (ГОСТ 6267—74). Существует конструкция направляющих качения с применением роликовых опор двух типов: на подвижной и неподвижной платформе. Конструкция направляющих качения на подвижной платформе в виде клина с уклоном 1:10 показана на рисунке 15. Платформа перемещается специальным винтом 1, конец которого имеет четыре прорези (см. сечение А—А), относительно резьбовой втулки 2, укрепленной в корпусной детали. Ввертыванием крепежного болта 3 с конусным наконечником разжимается часть винта 1 с четырьмя прорезями, в результате чего контрится клин. Роликовые опоры, установленные на платформах, следует регулировать и отлаживать под заданную нагрузку. Регулирование подвижной опоры заключается в нагружении ее соответствующим грузом на контрольной плите до равномерного прилегания, которое измеряется щупом толщиной 0,03 мм. Затем поворотом гаек 10 (рисунок 14, б) создают необходимый натяг тарельчатым пружинам 8, оставляя гарантированный зазор s = 0,02... 0,03 мм, который измеряют щупом между плоскостью направляющей подушки 2 роликовой опоры и платформой 11. После этого положение резьбовых головок фиксируют специальными стопорными винтами. Монтажная схема роликовых опор вертикальных направляющих стойки станка ФП-14 для перемещения каретки по оси Z показана на рисунке 16. Направляющие состоят из накладных стальных планок длиной 500, шириной 160 и толщиной 60 мм, термически обработанных (твердостью НRCэ 59—6З), зафиксированных по пазу 5, закрепленных винтами 6 и коническими штифтами 3. Поджимные роликовые опоры устанавливают с каждой стороны планок в виде неподвижных платформ 1, платформы 2 с двумя основными роликовыми опорами располагают по боковым поверхностям с противоположной стороны направляющих планок 4. C боковой стороны правой (на рисунке) направляющей планки 4 укреплена неподвижная роликовая опора 9, с боковой стороны, противоположной направляющей, размещена подвижная роликовая опора 8 для осуществления натяга. Поджимные роликовые опоры в платформах 1 предохраняют каретку от опрокидывания; их устанавливают так, чтобы зазор между опорой и платформой при проверке щупом в опоре (см. рисунок 14) не превышал 0,02—0,03 мм [путем пригонки стальной прокладки 7 (см. рис. 16)]. Затем регулируют роликовые опоры 8 на подвижных клиньях. Натяг клиновой роликовой опоры создается до получения зазора 0,02—0,03 мм между основанием обоймы и поверхностью клина. После этого положение клина окончательно фиксируют стопорным винтом. Монтажная схема направляющих каретки вертикального перемещения по оси Z станка 2ФП-242В (рис. 17) характеризуется применением комбинированных направляющих, в которых стальные планки 1 сочетаются с пластинами тефлона 3 и поджимными роликовыми направляющими качения 2 (танкетками). По ширине направляющих натяг создается клиновой роликовой опорой 5, которая перемещается винтом 4. Рекомендуемое фирмой «Лукас» (Великобритания) размещение роликовых опор в направляющих качения показано на рис. 13. Стрелками выделено расположение поджимных опор.
Рис.13 – Схемы размещения роликовых опор
Рис. 16 – Монтажная схема размещения роликовых опор направляющих качения стойки станка
Рис.17 – Монтажная схема комбинированных направляющих каретки вертикального перемещения станка 2ФП-242В
|