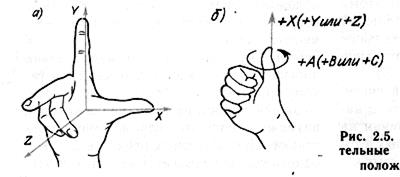
Система координат станка.У станков различных типов и моделей системы координат размещают по-разному (рис. 2), определяя при этом положительные направления осей и положение начала координат (нуль станка М) Система координат станка является главной расчетной системой, в которой определяются предельные перемещения, начальные и текущие положения рабочих органов станка. При этом положения рабочих органов станка характеризуют их базовые точки, выбираемые с учетом конструктивных особенностей отдельных управляемых по программе узлов станка. Так, базовыми служат точки: для шпиндельного узла — точка N пересечения торца шпинделя с осью его вращения (рис.2); для суппорта токарно-револьверного станка — центр поворота резцедержателя в плоскости, параллельной направляющим суппорта и проходящей через ось вращения шпинделя, или точка базирования инструментального блока; для крестового стола — точка пересечения его диагоналей или специальная настроечная точка, определяемая конструкцией приспособления; для поворотного стола — центр поворота на зеркале стола и т. д. Базовая точка может быть материально выражена точным базовым отверстием в центре стола станка (например, точка F на рис. 3). В технической документации пределы возможных смещений рабочих органов, как правило, указывают пределами смещения базовых точек. Систему координат станка, выбранную в соответствии с рекомендациями ГОСТ 23597—79 (см. рис. 1), принято называть стандартной. В этой системе положительные направления осей координат определяются по правилу правой руки. Большой палец (рис. 4, а) указывает положительное направление оси абсцисс (X), указательный — оси ординат— (Y), средний — оси аппликат (Z). Положительные направления вращений вокруг этих осей определяются другим правилом правой руки. Согласно этому правилу, если расположить большой палец по направлению оси, то остальные согнутые пальцы укажут положительное направление вращения (рис. 4,б).
Рис 2. Размещение координатных систем у различных станков с ЧПУ: а-карусельный; б- вертикально-фрезерный
Ориентация осей стандартной системы координат станка связывается с направлением движения при сверлении на сверлильных, расточных, фрезерных и токарных станках. Направление вывода сверла из заготовки принято в качестве положительного для оси Z, т. е. ось Z всегда связывается с вращающимся элементом станка — шпинделем. Ось X перпендикулярна к оси Z и параллельна плоскости установки заготовки. Если такому определению соответствуют две оси, то за ось X принимают ту, вдоль которой возможно большее перемещение узла станка. При известных осях X и Z ось Y однозначно определяется из условия расположения осей в правой прямоугольной системе координат. Начало стандартной системы координат станка обычно совмещают с базовой точкой узла, несущего заготовку, зафиксированного в таком положении, при котором все перемещения рабочих органов станка могли бы описываться положительными координатами (см. рис. 2, 3). Точка М, принятая за начало отсчета системы координат станка, называется нулевой точкой станка или нулем станка. В этом положении рабочие органы (базовые точки), несущие заготовку и инструмент, имеют наименьшее удаление друг от друга, а отсчетные элементы станка определяют нуль отсчета на табло цифровой индикации.
Рис 3. Система координат вертикально-сверлильного станка с ЧПУ
Например, у вертикально-сверлильного станка (см. рис. 3) базовой точкой F стола является центр стола, в котором выполнено отверстие диаметром 40Н8. Базовой точкой шпинделя является точка N — центр отверстия шпинделя в плоскости торца шпинделя. Конструкцией станка определено, что стол может смещаться по оси X (продольная ось стола) на 400 мм вправо и влево относительно центрального положения базовой точки. Возможные смещения стола оси Y (поперечные) составляют 450 мм. Таким образом, прямоугольник (на рис. 3 заштрихован), образованный линиями возможного смещения точки F по осям X и Y, определяет возможную зону обработки заготовок инструментом, ось которого совпадает с осью шпинделя. Эта зона (ее часто называют рабочей зоной) у рассматриваемого станка в плоскости ограничена размерами 800×450 мм.
Рис 4. Правило правой руки; а – положительные направления осей координат; б – положительное направление вращений
Наличие данных о зоне обработки обязательно, так как они определяют возможности станка при программировании перемещений обрабатываемых заготовок. Для того чтобы отсчет перемещений стола по осям X и Y всегда был положительным, нуль станка М принимают размещенным в одном из углов рабочей зоны (см. рис. 2,б). Естественно, что положение точки М является фиксированным и неизменным, и в этом случае точка М будет являться началом координат станка. Тогда положение точки F может быть задано1 координатами x МF и yМF относительно точки М.
Рис 5. Системы координат станка (XMY) и детали(XдW Yд)
[2] Для рассматриваемого станка (см. рис. 3) положение точки F будет изменяться в пределах 0—800 мм по оси X и 0—450 мм по оси Y. Возможное смещение торца шпинделя в направлении оси Z составит 380 мм (70— 450 мм). При этом за начало перемещения принимается нижнее (предельное) положение торца относительно зеркала стола, при котором расстояние от торца до зеркала стола равно 70 мм. При работе станка табло индикации на панели УЧПУ отражает истинное положение базовых точек станка относительно нуля станка. Для рассматриваемого примера это положение точки F относительно точки М и точки N относительно нулевого уровня в соответствующей системе ХYZ координат станка. Для взаимного положения рабочих органов станка, показанного на рис. 3 на табло индикации будут данные: Х250.00, Y235.00 и Z000.00. Для положения, когда ось шпинделя будет совмещена с точкой 133, табло индикации покажет Х800.00, Y450.00 и Z000.00. В положении, когда точка N будет совмещена с точкой 313, на табло индикации будут значения: Х800.00, Y000.00 и Z380.00. На рассматриваемом станке в положении, когда ось шпинделя будет совмещена с нулевой точкой М, а его торец находится на расстоянии 70 мм от зеркала стола, на табло цифровой индикации по всем программируемым координатам (X, Y, Y) будут показаны нули. Таким образом, если на данном станке обрабатывать деталь с использованием абсолютного отсчета, то все ее координаты (рис. 5) должны быть определены относительно нулевой точки М станка. Обычно в нулевую точку станка рабочие органы можно переместить путем нажатия кнопок на пульте управления станком или соответствующими командами УП. Точный останов рабочих органов в нулевом положении по каждой из координат обеспечивается датчиками нулевого положения. Движения рабочих органов станка задаются в УП координатами или приращениями координат базовых точек в стандартной (правой) системе координат. В рассматриваемом примере (см. рис. 3) это координаты х МF и у МF центра стола (базовой точки F) и координата Z, N положения по высоте торца шпинделя (базовой точки N относительно нулевого уровня). В паспортах станков с ЧПУ всех типов указаны координаты, которые закреплены за конкретным рабочим органом, и показаны направления всех осей, начало отсчета по каждой из осей и пределы возможных перемещений. Для того чтобы не было путаницы с положительными направлениями рабочих органов, связанных с заготовкой (обозначение осей со штрихом) и с инструментом (обозначение осей без штриха), при подготовке УП всегда исходят из того, что инструмент движется относительно неподвижной заготовки.
Рис. 6. Система координат инструмента: а — резец; б — сверло
В соответствии с этим и указывают положительные направления осей координат на расчетных схемах, эскизах и другой документации, используемой при программировании. Другими словами, за основную при программировании принимают стандартную систему координат, в которой определены положения и размеры обрабатываемой детали, относительно которой перемещается инструмент. Принятое допущение корректируется системой УЧПУ таким образом, что если для реализации запрограммированного движения инструмента относительно заготовки необходимо переместить рабочий орган с инструментом, то это движение выполняется с заданным в УП знаком, а если требуется переместить рабочий орган с заготовкой, то знак направления движения изменяется на противоположный.
|