Понятие о регулировании координат (переменных) электроприводаОбщие принципы построения автоматизированного электропривода Основные понятия, термины и определения Управление представляет собой организацию того или иного процесса. Система управления – совокупность всех устройств, обеспечивающих управление каким-либо объектом или процессом. Систему автоматического управления (САУ) образуют устройства управления и объект управления. В некоторых случаях задачей управления является обеспечение постоянства некоторой физической переменной, например скорости вращения, или её изменение во времени по некоторому закону. Такой частный вид управления обычно называется регулированием. Система автоматического регулирования (САР) по аналогии с системой автоматического управления состоит из регулируемого объекта и регулятора. В состав САР, кроме регулятора, входят и другие необходимые устройства [2, 4]. К ним относятся: – датчики регулируемых переменных, с помощью которых получают информацию об их текущих значениях; – задатчики регулируемых переменных, с помощью которых системе задаётся требуемый уровень регулируемой переменной; – измерительные устройства, с помощью которых определяется отклонение текущего (фактического) значения регулируемой переменной от заданного значения; – устройства сопряжения, позволяющие соединять все элементы и устройства системы регулирования в единый комплекс; – элементы и устройства, обеспечивающие защиту, блокировки и сигнализацию. Различают следующие виды САР: – системы автоматической стабилизации, обеспечивающие поддержание регулируемой величины на заданном уровне и с требуемой точностью; – следящие системы, которые осуществляют измерение регулируемой величины во времени по произвольному закону. Примерами такой системы могут служить системы слежения локатором за целью или система радиоантенны, обеспечивающая связь с космическими объектами; – системы программного регулирования, которые обеспечивают измерение регулируемой переменной во времени по определённой программе. К таким системам относятся, в частности, системы числового управления станками; – системы адаптации, обеспечивающие оптимальное регулирование переменной по заданному показателю качества при изменяющихся условиях работы объекта регулирования. К таким системам относятся самонастраивающиеся, самоорганизующиеся и самообучающиеся системы. Системы стабилизации делятся на астатические и статические. Астатические системы стабилизации обеспечивают поддержание регулируемой переменной в статическом режиме на неизменном уровне при изменениях возмущающего воздействия. Статическими системами называются такие, в которых в установившемся режиме происходит изменение регулируемой переменной при изменении возмущающего воздействия. Другими словами, астатические САР обеспечивают регулирование переменных в установившемся режиме без ошибки, а статические САР – с некоторой ошибкой. Объект управления (электродвигатель) подвергается различным воздействиям. Со стороны системы управления на него действует управляющее (регулирующее) воздействие, обеспечивающее требуемое регулирование заданной переменной. К возмущающим воздействиям относятся также изменения момента сопротивления, колебания питающего напряжения, выход из строя элементов системы управления и т. д. Основная задача систем управления состоит именно в том, чтобы при всех возможных возмущающих воздействиях, действующих на электродвигатель, обеспечить должным образом его управление. Понятие о регулировании координат (переменных) электропривода Для управления движением исполнительных органов рабочих машин и обеспечения требуемых режимов самого ЭП необходимо регулирование ряда переменных (координат), например скорости, ускорения и положения исполнительного органа рабочей машины, токов в цепях двигателей, момента на их валу, магнитного потока электрических машин и т. д. Регулирование скорости движения исполнительных органов рабочих машин и механизмов может осуществляться с помощью ЭП в виде стабилизации скорости, изменения скорости в соответствии с произвольно меняющимся задающим сигналом (слежение) или по заранее заданной программе (программное движение). Регулирование положения характеризуется процессом перемещения исполнительных органов рабочих машин и механизмов в заданную точку пространства или плоскости и их установки там (фиксированием) с заданной точностью. Такое их перемещение из заданной точки плоскости или пространства (позиции) в другую называется позиционированием и обеспечивается соответствующим регулированием положения вала двигателя. Регулирование момента и тока двигателей производится в тех случаях, когда ЭП должен обеспечить требуемое ускорение или замедление движения исполнительных органов или создать необходимое натяжение в обрабатываемом материале (изготовление бумаги, тканей, прокатки металлов и т. д.). Сюда же относятся и случаи, когда требуется ограничивать момент ЭП для предотвращения поломки рабочей машины или механизма при внезапном стопорении движения исполнительного органа (например, при копании грунта, бурении скважин, заклинивании механической передачи и т. д.). Регулирование (ограничение) тока и момента двигателей требуется также для обеспечения нормальных условий работы этих двигателей. Так, при пуске двигателей постоянного тока обычного исполнения по соображениям нормальной работы их коллекторно-щёточного узла ток должен быть ограничен на уровне 2–3 Iном. Необходимость ограничения тока возникает и при пуске мощных двигателей постоянного и переменного тока, когда большие пусковые токи двигателей могут привести к недопустимому снижению напряжения питающей сети.
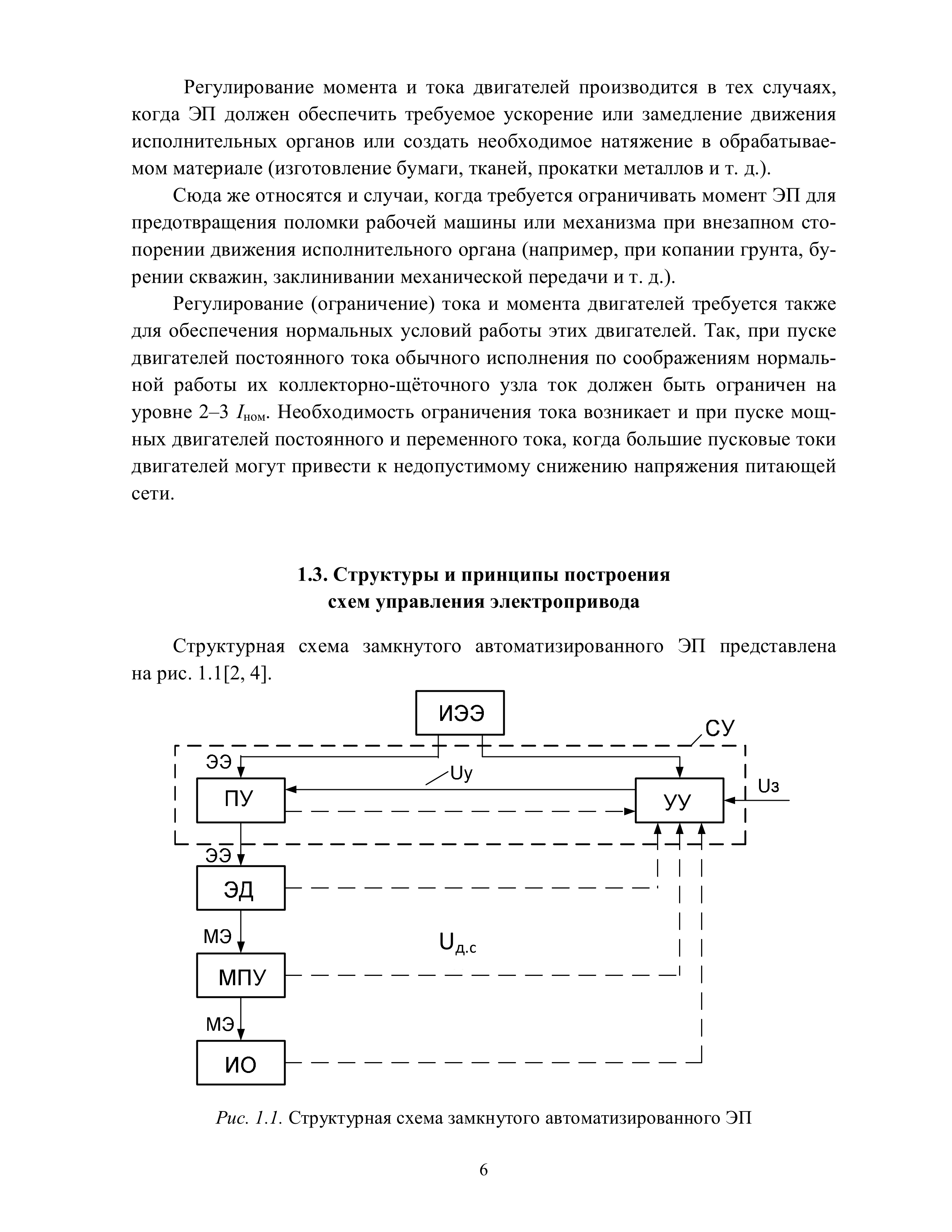
1.3. Структуры и принципы построения схем управления электропривода Структурная схема замкнутого автоматизированного ЭП представлена на рис. 1.1[2, 4].
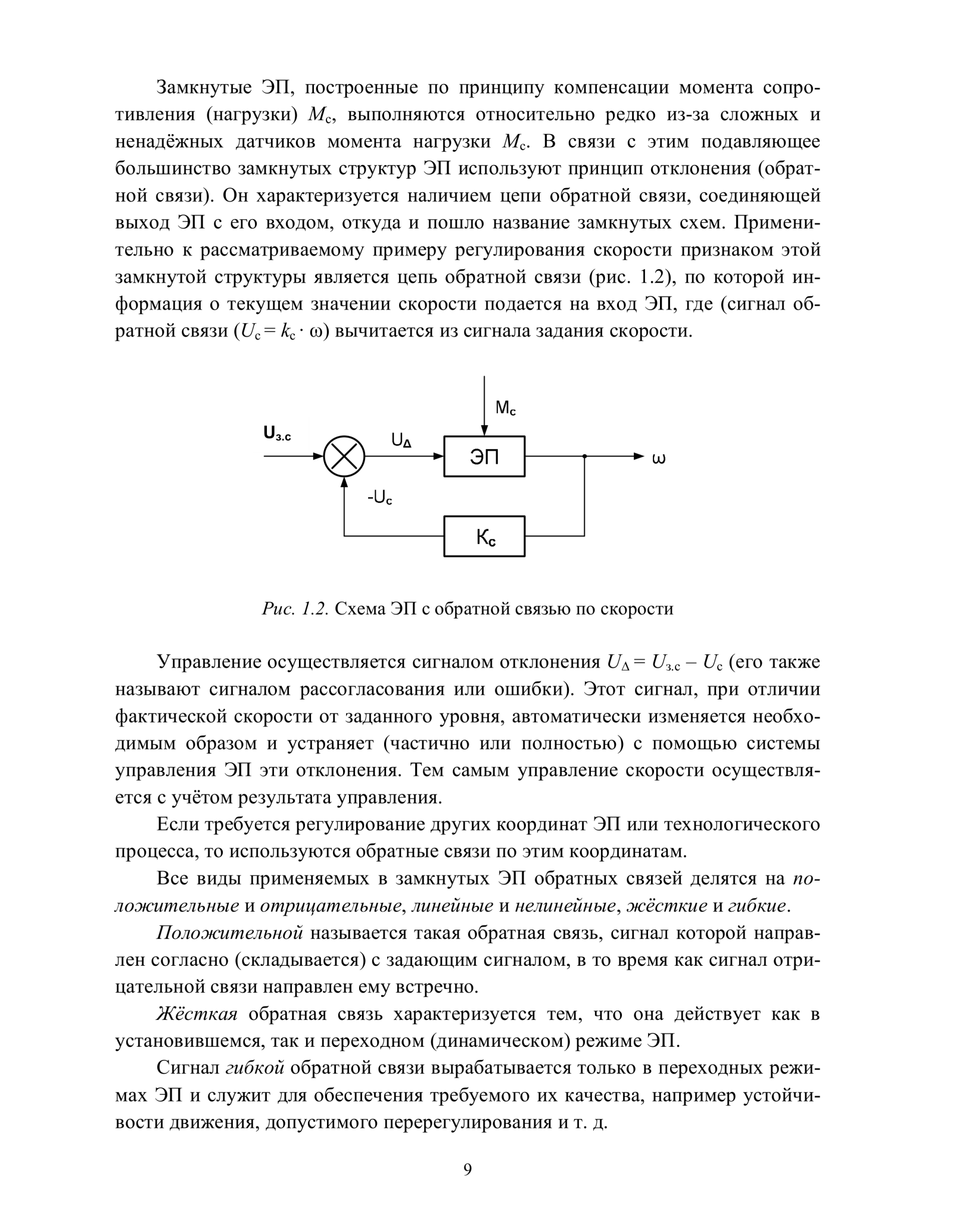
В схеме: ИЭЭ – источник электрической энергии; ЭЭ – электрическая энергия. Её параметры – напряжение (U), частота (f) и ток (I); МЭ – механическая энергия. Её параметры – угловая (ω) или линейная (V) скорость, полезные момент (М) или сила (F), полезная мощность (Рп); ПУ – преобразовательное устройство – силовой преобразователь, предназначенный для преобразования параметров электроэнергии ИЭЭ; ЭД – электродвигатель, предназначенный для преобразования параметров электроэнергии преобразователя в механическую энергию (и обратное преобразование); МПУ – механическое передаточное устройство, предназначенное для изменения скорости вращения или вида движения. В качестве МПУ в электроприводах может быть редуктор, ременная передача, винтовая и зубчато-реечная передача, кривошипно-шатунный механизм, барабан с тросом, вариатор скорости, электромагнитная или гидравлическая управляемые муфты, коробка передач. В элементах МПУ за счёт действующего трения возникают потери мощности ∆Р (кВт). МПУ обладают либо моментом инерции J (кг∙м2), либо инерционной массой m (кг); ИО – исполнительный орган рабочей машины, предназначенный для совершения полезной работы. На ИО возникает момент сопротивления Мс (Н∙м) или сила сопротивления Fc (Н) в зависимости от его вида движения. Они создают на ИО мощность сопротивления Рс (кВт): Рс = Мс ∙ ωи.о. – при вращательном движении, ωи.о. – рад/с, Рс = Fc ∙ Vи.о. – при линейном движении, Vи.о. – м/с. Ротор (или якорь) ЭД обладает моментом инерции J (кг∙м2), вращается со скоростью ω (рад/с). На валу ЭД возникают полезный момент М (Н∙м) и полезная мощность Р2 (кВт). Следует отметить, что в некоторых ЭП механические передачи отсутствуют. Сигнал управления Uу силовым преобразователем вырабатывается устройством управления (УУ), в состав которого в общем случае входят устройства получения, преобразования, хранения, распределения и выдачи информации, блоки сопряжения, регуляторы переменных (координат), различные функциональные блоки управления и т. д. Устройство управления и силовой преобразователь образуют систему управления (СУ) электропривода. Устройство управления вырабатывает сигнал управления Uу с помощью сигнала задания (уставки) U з, задающего характер движения исполнительного органа, и ряда дополнительных сигналов U д. с, дающих информацию о реализации технологического процесса рабочей машины, характере движения исполнительного органа, работе отдельных элементов ЭП и т. д. Дополнительные сигналы поступают на устройство управления от различных датчиков, которые на рис. 1.1 не показаны. Сигнал задания (уставки) Uз электропривод получает от внешней по отношению к нему системы более высокого уровня, например автоматизированной системы управления технологическим процессом (АСУ ТП), которая поставляет также электроприводу необходимую для его функционирования информацию. В зависимости от выполняемых функций, вида и количества регулируемых координат и степени автоматизации технологических процессов реализация ЭП может быть самой разнообразной. Все ЭП делятся на две группы: неавтоматизированные и автоматизированные. Неавтоматизированные – это такие ЭП, управление которыми выполняет человек (оператор) с помощью простых средств. Он осуществляет пуск и остановку ЭП, изменение скорости и её реверсирование в соответствии с заданным технологическим циклом. В автоматизированном ЭП операции управления в соответствии с требованиями технологического процесса выполняются системой управления (см. рис. 1.1). На оператора возлагаются функции только по включению и отключению ЭП, наладке и контролю за его работой. Все автоматизированные ЭП делятся, в свою очередь, ещё на две группы: разомкнутые и замкнутые [1, 3]. Работа разомкнутого ЭП характеризуется тем, что все внешние возмущения отражаются на работе ЭП. Например, изменение момента сопротивления влияет на выходную координату ЭП – его скорость. Другими словами, разомкнутый ЭП не отстроен от влияния внешних возмущений. Разомкнутый ЭП по этой причине не обеспечивает высокого качества регулирования координат, хотя и отличается в то же время простой схемой. Разомкнутые ЭП обычно применяются для обеспечения пуска, торможения и реверса двигателей. В схемах таких ЭП используется информация о текущих скорости, времени, токе (моменте) или пути, что позволяет автоматизировать указанные процессы. Замкнутый ЭП может быть реализован по принципу отклонения с использованием обратных связей или по принципу компенсации внешнего возмущения. Основным отличительным признаком замкнутых систем является полное или частичное устранение влияния внешнего возмущения на регулируемую координату ЭП. В силу этого обстоятельства замкнутый ЭП обеспечивает более качественное управление движением исполнительного органа рабочей машины, хотя его схемы оказываются более сложными. Замкнутые ЭП, построенные по принципу компенсации момента сопротивления (нагрузки) Мс, выполняются относительно редко из-за сложных и ненадёжных датчиков момента нагрузки Мс. В связи с этим подавляющее большинство замкнутых структур ЭП используют принцип отклонения (обратной связи). Он характеризуется наличием цепи обратной связи, соединяющей выход ЭП с его входом, откуда и пошло название замкнутых схем. Применительно к рассматриваемому примеру регулирования скорости признаком этой замкнутой структуры является цепь обратной связи (рис. 1.2), по которой информация о текущем значении скорости подается на вход ЭП, где (сигнал обратной связи (Uс = kс ∙ ω) вычитается из сигнала задания скорости. Рис. 1.2. Схема ЭП с обратной связью по скорости
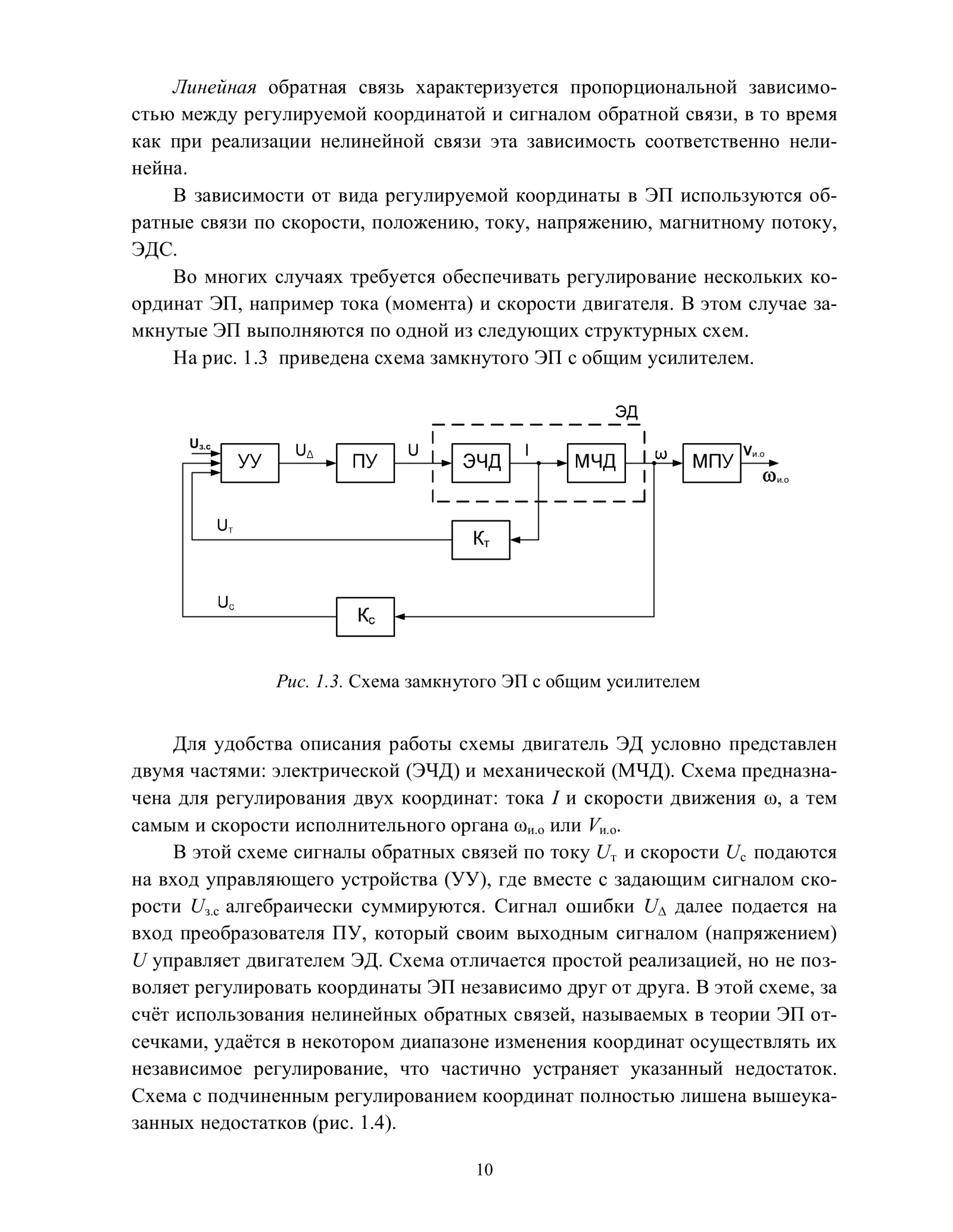
Управление осуществляется сигналом отклонения U ∆ = Uз.с – Uс (его также называют сигналом рассогласования или ошибки). Этот сигнал, при отличии фактической скорости от заданного уровня, автоматически изменяется необходимым образом и устраняет (частично или полностью) с помощью системы управления ЭП эти отклонения. Тем самым управление скорости осуществляется с учётом результата управления. Если требуется регулирование других координат ЭП или технологического процесса, то используются обратные связи по этим координатам. Все виды применяемых в замкнутых ЭП обратных связей делятся на положительные и отрицательные, линейные и нелинейные, жёсткие и гибкие. Положительной называется такая обратная связь, сигнал которой направлен согласно (складывается) с задающим сигналом, в то время как сигнал отрицательной связи направлен ему встречно. Жёсткая обратная связь характеризуется тем, что она действует как в установившемся, так и переходном (динамическом) режиме ЭП. Сигнал гибкой обратной связи вырабатывается только в переходных режимах ЭП и служит для обеспечения требуемого их качества, например устойчивости движения, допустимого перерегулирования и т. д. Линейная обратная связь характеризуется пропорциональной зависимостью между регулируемой координатой и сигналом обратной связи, в то время как при реализации нелинейной связи эта зависимость соответственно нелинейна. В зависимости от вида регулируемой координаты в ЭП используются обратные связи по скорости, положению, току, напряжению, магнитному потоку, ЭДС. Во многих случаях требуется обеспечивать регулирование нескольких координат ЭП, например тока (момента) и скорости двигателя. В этом случае замкнутые ЭП выполняются по одной из следующих структурных схем. На рис. 1.3 приведена схема замкнутого ЭП с общим усилителем. Рис. 1.3. Схема замкнутого ЭП с общим усилителем
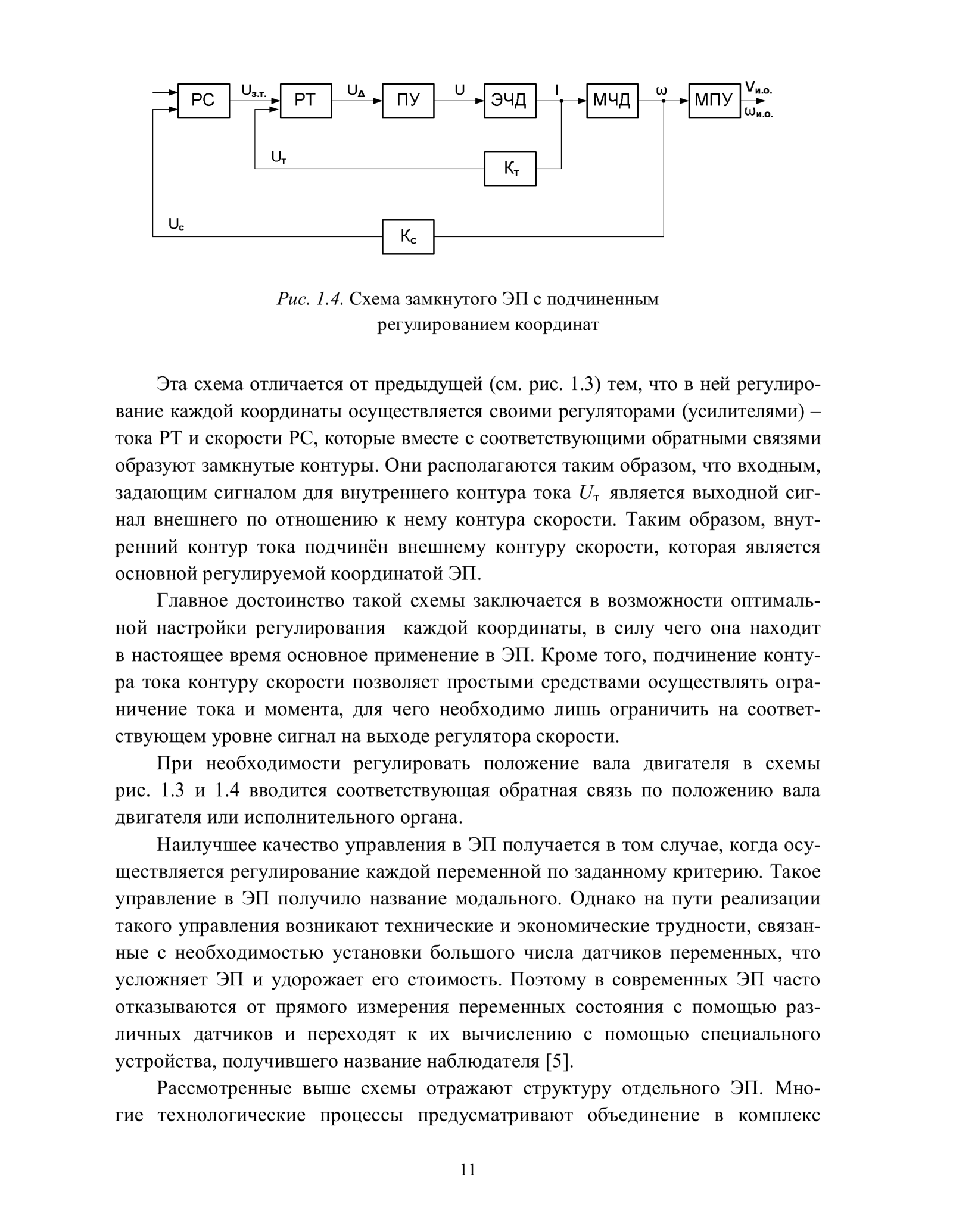
Для удобства описания работы схемы двигатель ЭД условно представлен двумя частями: электрической (ЭЧД) и механической (МЧД). Схема предназначена для регулирования двух координат: тока I и скорости движения ω, а тем самым и скорости исполнительного органа ωи.о или Vи.о. В этой схеме сигналы обратных связей по току U т и скорости U с подаются на вход управляющего устройства (УУ), где вместе с задающим сигналом скорости Uз.с алгебраически суммируются. Сигнал ошибки U∆ далее подается на вход преобразователя ПУ, который своим выходным сигналом (напряжением) U управляет двигателем ЭД. Схема отличается простой реализацией, но не позволяет регулировать координаты ЭП независимо друг от друга. В этой схеме, за счёт использования нелинейных обратных связей, называемых в теории ЭП отсечками, удаётся в некотором диапазоне изменения координат осуществлять их независимое регулирование, что частично устраняет указанный недостаток. Схема с подчиненным регулированием координат полностью лишена вышеуказанных недостатков (рис. 1.4).
Эта схема отличается от предыдущей (см. рис. 1.3) тем, что в ней регулирование каждой координаты осуществляется своими регуляторами (усилителями) – тока РТ и скорости РС, которые вместе с соответствующими обратными связями образуют замкнутые контуры. Они располагаются таким образом, что входным, задающим сигналом для внутреннего контура тока U т является выходной сигнал внешнего по отношению к нему контура скорости. Таким образом, внутренний контур тока подчинён внешнему контуру скорости, которая является основной регулируемой координатой ЭП. Главное достоинство такой схемы заключается в возможности оптимальной настройки регулирования каждой координаты, в силу чего она находит в настоящее время основное применение в ЭП. Кроме того, подчинение контура тока контуру скорости позволяет простыми средствами осуществлять ограничение тока и момента, для чего необходимо лишь ограничить на соответствующем уровне сигнал на выходе регулятора скорости. При необходимости регулировать положение вала двигателя в схемы рис. 1.3 и 1.4 вводится соответствующая обратная связь по положению вала двигателя или исполнительного органа. Наилучшее качество управления в ЭП получается в том случае, когда осуществляется регулирование каждой переменной по заданному критерию. Такое управление в ЭП получило название модального. Однако на пути реализации такого управления возникают технические и экономические трудности, связанные с необходимостью установки большого числа датчиков переменных, что усложняет ЭП и удорожает его стоимость. Поэтому в современных ЭП часто отказываются от прямого измерения переменных состояния с помощью различных датчиков и переходят к их вычислению с помощью специального устройства, получившего название наблюдателя [5]. Рассмотренные выше схемы отражают структуру отдельного ЭП. Многие технологические процессы предусматривают объединение в комплекс нескольких рабочих машин и механизмов, должным образом между собой взаимодействующих. Наилучший результат работы такого единого технологического комплекса достигается только при его автоматизации, в чём ЭП принадлежит основная роль. За счёт соответствующего управления ЭП обеспечивается требуемая последовательность всех технологических операций, достигаются наилучшие (оптимальные) режимы работы промышленного оборудования и самого ЭП. Для управления технологическими комплексами всё шире используются ЭВМ.
|