Решение этого уравнения можно записать в виде
a(t)=aosin(wo t +jo), (5)
где ao – амплитуда колебаний (максимальное отклонение); wo – собственная частота колебаний; jo -- начальная фаза колебаний. Продифференцировав дважды уравнение (5) по времени и подставив в дифференциальное уравнение (4), получим соотношение
(J wo2- mgl)aosin(w ot +jo)=0,
которое удовлетворяется при условии J wo2- mgl =0. Отсюда собственная частота колебаний физического маятника
(6)
Тогда уравнение движения можно записать в виде дифференциального уравнения свободных гармонических колебаний
Амплитуда и начальная фаза колебаний определяются из начальных условий. Если в начальный момент времени t =0 известны угол отклонения маятника от положения равновесия a(0) и угловая скорость движения маятника d a/ dt =w(0) (не путать угловую скорость движения маятника w с собственной частотой колебаний wо!), имеем a(0)=aosinjo и w(0)=woaocosjo . Решая эту систему уравнений, получаем ao=(a2(0)+w2(0)/wo2)1/2 и jo=arctg(woa(0)/w(0)). Отсюда находим, что, если в начальный момент времени маятник покоится w(0)=0 в положении a=a(0), то амплитуда равна начальному отклонению маятника aо=a(0), а начальная фаза jо=p/2. Решение дифференциального уравнения для таких начальных условий имеет вид a(t)=ao sin (wo t +p/2).
. 8)
Если размеры тела малы по сравнению с длиной маятника l, то есть тело можно принять за материальную точку, подвешенную на невесомой нерастяжимой нити, то такой маятник является математическим маятником с периодом
. (9)
Здесь учли, что момент инерции материальной точки относительно оси J = ml 2. Как видим из сравнения (8) и (9), в отличие от математического маятника, период колебаний которого зависит только от длины и ускорения свободного падения, период колебаний физического маятника зависит также от его массы и момента инерции. Каждому физическому маятнику можно подобрать такой математический маятник, период колебаний которого равен периоду колебаний физического маятника. Длина такого математического маятника называется приведенной длиной физического маятника. Сопоставив (8) и (9) получим выражение для приведенной длины физического маятника
l пр=(Iс + ml 2)/ ml. (10)
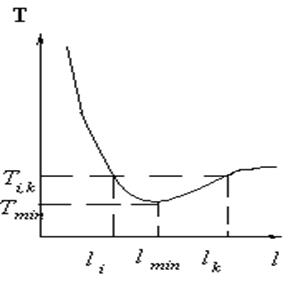
В отличие от математического маятника, зависимость периода колебаний которого от длины T ~ l 1/2, для физического маятника, зависимость T(l) более сложная и представлена на рис.2.
Рис. 2. Зависимость периода колебаний физического маятника от длины.
Как следует из формулы (9), при l ® 0 период физического маятника Т ® ∞, то есть, если ось вращения проходит через центр инерции, то маятник находится в состоянии безразличного равновесия. При увеличении l (когда выполняется условие ml2 >> Jc)период колебаний физического маятника стремится к периоду колебаний математического маятника. Зависимость Т(l) имеет минимум при некотором значении l min. Измеряя зависимость T(l) и построив график, можно определить момент инерции физического маятника Jc и ускорение свободного падения g. Для этого при Т мат> Т>Т min находим два значения li и lk, соответствующие одному и тому же периоду Тi=Tk=T ( рис. 2). Применив формулу (8) можно
, (11)
. (12)
Решая совместно систему уравнений (11) и (12) относительно величин J c и g, получим
g =4p2(li+lk)/ T 2, (13)
J c= mlilk. (14)
|

 . (7)
. (7) Таким образом, движение физического маятника в рассматриваемых условиях отсутствия трения и малой амплитуды представляет собой синусоидальные или гармонические колебания с периодом
Таким образом, движение физического маятника в рассматриваемых условиях отсутствия трения и малой амплитуды представляет собой синусоидальные или гармонические колебания с периодом