
Критерій стійкості
Алгебраїчними критеріями стійкості називають критерії, які визначають необхідні і достатні умови стійкості системи будь-якого порядку без вирішення характеристичного рівняння, але з перевіркою певних співвідношень, що складають з його коефіцієнтів. Ці критерії були знайдені і сформульовані у вигляді нерівностей Є. Раусом в 1877 р. і незалежно від нього в декілька іншій формі в 1885 р. А. Гурвицем. Алгебраїчний критерій Рауса дозволяє визначити стійкість замкнутої системи високого порядку (п > 5) за коефіцієнтами характеристичного рівняння (особливо у тих випадках, якщо вони задані чисельно), що зведені до таблиці. При складені таблиці у першу строку записують коефіцієнти з парними індексами а 0, а 2, а 4,..., у другу - з непарними а 1, а 3, а 5 ..., наступні строки отримують шляхом ділення різниць перехресних добутків коефіцієнтів двох попередніх строк на коефіцієнт першого стовпця попередньої стоки. Для стійкості системи необхідно і достатньо, щоб при а 0>0 коефіцієнти першого стовпця таблиці були позитивні, тобто
Алгебраїчний критерій Гурвиця в аналітичній формі зв’язує умови стійкості системи з її параметрами і дозволяє виділити область стійкості. Критерій базується на обчислені так називаємих визначників Гурвиця за коефіцієнтами характеристичного рівняння. Необхідною умовою стійкості системи являються позитивні значення всіх коефіцієнтів її характеристичного рівняння, тобто а 0 > 0; а 1 > 0,..., аn > 0. Якщо необхідна умова не виконується, то система нестійка. В найпростіших випадках (характеристичне рівняння першого і другого порядку) ця необхідна умова являється одночасно і достатньою. При n ³ 3 (n - порядок системи) при дотриманні необхідної умови система може бути стійкою і нестійкою. Необхідною і достатньою умовою стійкості системи при додатних значеннях всіх коефіцієнтів характеристичного рівняння являються додатні значення всіх визначників, що складаються з коефіцієнтів характеристичного рівняння по схемі: 1) по головній діагоналі зліва вниз направо виписуються всі коефіцієнти рівняння, починаючи з коефіцієнта при другому члені (а 1) і закінчуючи коефіцієнтом передостаннього члена (ап -1) включно; 2) стовпчики при діагоналі вверх доповнюються коефіцієнтами з індексами, що спадають, а стовпчики при діагоналі вниз - коефіцієнтами з індексами, що підвищуються. Всі місця, які треба було заповнити коефіцієнтами нижче аn і вище а 0, замінюються нулями
а 1 а 3 а 5 а 7.... 0 0 0 0 а 0 а 2 а 4 а 6.... 0 0 0 0 0 а 1 а 3 а 5.... 0 0 0 0 0 а 0 а 2 а 4.... 0 0 0 0 D n = - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - > 0 (7.4) 0 0 0 0 ап -4 ап -2 ап 0 0 0 0 0 ап -5 ап -3 ап -1 0 0 0 0 0 ап -6 ап -4 ап -2 ап 0 0 0 0 ап -7 ап -5 ап -3 ап -1 . На практиці після перевірки знака всіх коефіцієнтів характеристичного рівняння складають визначники, починаючи з меншого, тобто D1 > 0, D2 > 0, D3 > 0 та інші. Якщо виявиться, що якийсь з визначників менше нуля, то продовжувати розрахунки наступних визначників не має сенсу, оскільки їх значення будуть від’ємними. Визначники обчислюють за формулами:
D1 = а 1; D2 = а 0 а 2 = а 1 а 2 - а 0 а 3; D3 = а 0 а 2 а 4 = 0 а 1 а 3 = [ а 3(а 1 а 2 - а 0 а 3) - а 12 а 4]
ПРИКЛАДИ. 1. Перевірити за критерієм Рауса-Гурвиця стійкість АСР, характеристичне рівняння якої має вигляд: р 3 + 6 р 2 + 1 = 0 Необхідна умова не виконується: коефіцієнт при р дорівнює нулю. Виходячи з цього система нестійка. 2. Перевірити по критерію Рауса-Гурвиця стійкість АСР, характеристичне рівняння якої має вигляд: р 3 + 2,5 р 2 + 3 р + 2 = 0 Необхідна умова виконується: всі коефіцієнти додатні. а 1 а 3 D2 = а 0 а 2 = а 1 а 2 - а 0 а 3 = 2,5×3 - 1×2 = 5,5 > 0
Отже, система стійка. 3. Перевірити за критерієм Рауса-Гурвиця стійкість АСР, характеристичне рівняння якої має вигляд: р 4 + р 3 + 4 р 2 + 3 р + 2 = 0 Необхідна умова виконується: всі коефіцієнти додатні. а 1 а 3 D2 = а 0 а 2 = а 1 а 2 - а 0 а 3 = 1× 4 – 1×3 = 1 > 0;
а 1 а 3 а 5 D3 = а 0 а 2 а 4 = [ а 3(а 1 а 2 - а 0 а 3) - а 12 а 4] = 3×1 - 1×2 = 1 > 0 0 а 1 а 3 Отже, система стійка. Частотними критеріями стійкості називаються критерії стійкості, що базуються на побудові частотних характеристик і так званого годографа Михайлова. Критерій Михайлова базується на зв’язку між характером перехідного процесу, що виникає при порушенні рівноваги системи й амплітудою і фазою вимушених коливань (амплітудно-частотна характеристика (АЧХ)), які встановлюються в системі під дією синусоїдального збуджуючого діяння. Якщо в поліномі характеристичного рівняння системи замінити величину р уявним аргументом j w, то отримаємо деяку функцію W (j w) = а 0(j w) п + а 1(j w)n-1 +...+ ап- 1(j w) + ап = Re (w) + jQ (w), (7.5)
де Re (w) = ап - ап- 2w2 + ап- 4w4 -..., Q (w) = ап- 1w - ап- 3w3 + ап- 5w5 -... Якщо змінювати величину w від - ¥ до + ¥, то кінець вектора А (j w) опише в комплексній площині криву, яку називають годографом Михайлова. А.В. Михайлов доказав, що вектор повертається на кут + np, якщо система стійка, і на кут менше + np,якщо система нестійка (n - порядок характеристичного рівняння). Оскільки дійсна частина Re (w) є парною, а уявна частина Q (w) - непарною функцією, то годограф Михайлова симетричний відносно дійсної осі. Через це в практичних дослідженнях розглядають зміни w або від - ¥ до 0, або від 0 до + ¥. Для того щоб автоматична система регулювання була стійкою, необхідно і достатньо, щоб годограф Михайлова, починаючись в точці, що лежить на додатній частині дійсної осі, при зміні частоти w від 0 до + ¥ послідовно обходив проти годинникової стрілки п квадрантів, повертаючись на кут n (p /2), і ніде не попадав у початок координат (не перетворюючись на нуль).
а б Рисунок 7.3. Аналіз стійкості систем за критерієм Михайлова: а - стійкі системи відповідно при п = 1; п = 2; п = 3; п = 4; б - порівняння стійких і нестійких систем 5 - стійка система при п = 3; 6 - нестійка система.
Кожному перетину годографом дійсної осі відповідає корінь рівняння Re (w) = 0, а кожному перетину уявної осі - корінь рівняння Q (w) = 0. Якщо побудувати графіки функцій Re (w) і Q (w), то точки перетину цих графіків з віссями при зростанні w в стійкій системі повинні чергуватись. При w = 0 годограф перетворюється в точку, яка розміщена в додатній частині дійсної осі. ПРИКЛАДИ. 4. Побудувати годограф Михайлова і визначити стійкість автоматичної системи регулювання, якщо характеристичне рівняння системи має вигляд: р 3 + р 2 + р + 2 = 0 Замінивши р = j w, отримаємо (j w)3 + (j w)2 + (j w) + 2 = 0 Re (w) = 2 - w2; Q (w) = w(1 - w2) При w = 0 отримаємо Re (w) = 2; Q (w) = 0 Значення w1, при якому годограф перетинає уявну вісь, визначимо із умови Re (w1) = 0; тобто 2 - w2 = 0; w1 = Знайдемо точку перетину з уявною віссю Q (w1) =
Наступні значення годографа шукати вже не має сенсу, так як видно, що критерій Михайлова в частині послідовного перетину квадрантів не дотримується. Значення w2, при якому годограф перетинає дійсну вісь між першим і четвертим квадрантом, знайдемо, із умови: Q (w2) = 0; тобто w2 (1 - w22) = 0; w2 =1 Re (w2) = 2 - w22 = 2 - 1 = 1 Отже, система нестійка. 5. Побудувати годограф Михайлова і визначити стійкість автоматичної системи регулювання, якщо характеристичне рівняння системи має вигляд: р3 + р2 + р + 0,5 = 0. Замінивши р = j w, отримаємо (j w)3 + (j w)2 + (j w) + 0,5 = 0 Re (w) = 0,5 - w2; Q (w) = w(1 - w2) При w = 0 отримаємо Re (w) = 0,5; Q (w) = 0
Значення w1, при якому годограф перетинає уявну вісь, визначимо із умови Re (w1) = 0; тобто 0,5 - w2 = 0; w1 = Знайдемо точку перетину з уявною віссю Q (w1) = Значення w2, при якому годограф перетинає дійсну вісь, Q (w2) = 0, тобто 1 - w2 = 0. Тоді w2 = 1 Re (w2) = 0,5 - w22 = 0,5 - 1 = - 0,5 В інтервалі 0 < w < Критерій стійкості Найквіста. Американський вчений в 1932 р. стосовно до електронних підсилювачів з від’ємним зворотним зв’язком сформулював правила, що дозволяють за виглядом АЧХ розімкнутої системи зробити висновок про стійкість замкнутих систем. Сенс цього полягає в тому, що порядок характеристичного рівняння розімкнутої системи завжди нижчий за порядок замкнутої системи. Узагальнення цього критерію для рішення задач автоматичного регулювання було виконано А.В. Михайловим. Передаточна функція деякої розімкнутої системи при заміні р на j w перетворюється в вираз для амплітудно-фазової характеристики W (j w) = Q (jw) / Р p(j w) (7.6) де Р p - характеристичне рівняння розімкнутої системи. Припустимо, що розімкнута система стійка, отже, згідно теореми Ляпунова, всі корені характеристичного рівняння знаходяться в лівій напівплощині, а нульових і уявних коренів немає. Побудуємо для цієї системи на комплексній площині годограф Михайлова, крива Р p(jw) (рис. 7.6). Для замкнутої системи
де Р (j w) = Р p(j w) + Q (j w), звідки Q (j w) = Р (j w) - Р p(j w). Характеристичне рівняння замкнутої системи визначається величиною Р (j w). Стійка в розімкнутому стані система може виявитись нестійкою в замкнутому стані. Припустимо, що система, яку ми розглядаємо знаходиться на межі стійкості і годограф Михайлова Р (j w) проходить через початок координат при деякій частоті w k. Отже, в цій системі існують незатухаючі коливання з частотою w k. Так як вектор Q (j w) можна визначити, як різницю векторів Р (j w) і Р p(j w), знайдемо вектор ВС, який є поліномом Q (j wк), тобто чисельником АФХ розімкнутої системи (точки В і С відповідають частоті w k). Знайдемо на годографі Р p(j w) точку А, що відповідає частоті w k, при якій годограф Р (j w) замкнутої системи проходить через початок координат, тобто Р (j w) = 0. Тоді Q (j w) = - Р p(j wk). Виходячи з цього АФХ розімкнутої системи, для якої вказані вектори являються знаменником і чисельником, перетворюються в одиницю зі знаком мінус при частоті w k. Звідси можемо зробити висновок про те, що якщо система в замкнутому стані знаходиться на межі стійкості, то АФХ розімкнутої системи проходить через точку з координатами (-1; j 0) на дійсній вісі. Якщо система в замкнутому стані нестійка Р (j w) > 0, Q (j w k) > Р p(j wk) і W (j w)>1. На основі викладеного критерій стійкості Найквіста можна сформулювати наступним чином: якщо розімкнута система стійка, то для стійкості цієї системи в замкнутому стані необхідно і достатньо, щоб амплітудно-фазова характеристика розімкнутої системи не охоплювала точку на дійсній осі з координатами (-1; j 0). Якщо розімкнута система нестійка і характеристичне рівняння має k коренів в правій півплощині (додатних), то для стійкості цієї системи в замкнутому стані необхідно і достатньо, щоб АФХ розімкнутої системи, що описується кінцем вектором 1 + W (j w), при збільшенні частоти від 0 до ¥ обходила критичну точку (-1; j 0) проти годинникової стрілки (в позитивному напрямку) k /2 разів. Так система рис. 7.7 буде стійка при k = 2.
Або в формулюванні Я.З. Ципкіна: якщо розімкнута система нестійка і її характеристичне рівняння має k коренів в правій півплощині, то для стійкості системи в замкнутому стані необхідно і достатньо, щоб число позитивних переходів (зверху вниз) було більше числа від’ємних переходів АФХ розімкнутої системи через відрізок дійсної вісі (-1; -¥) на k /2 раз при підвищенні частоти від 0 до ¥. Початок АФХ в згаданому діапазоні рахується за половину переходу. ПрикладИ. 6. Визначити стійкість замкнутої автоматичної системи регулювання, розімкнута частина якої описується характеристичним рівнянням: р 3 + 2 р 2 + 3 р + 2 = 0. Замінивши р = j w, отримаємо (j w)3 + 2(j w)2 + 3(j w) + 2 = 0. Звідси Re (w) = 2 - 2w2; Q (w) = w(3 - w2). Тоді при w = 0 значення Re (w) = 2; Q (w) = 0 Значення w1, при якому годограф перетинає уявну вісь, визначимо із умови Re (w1) = 0; тобто 2 - 2w2 = 0; w1 = 1. Знайдемо точку перетину з уявною віссю Q (w1) = 1(3 - 1) = 2 Значення w2, при якому годограф перетинає дійсну вісь Q (w2) = 0, тобто 3 - w2 = 0. Тоді w2 = Re (w2) = 2 - 2w22 = 2 - 6 = - 4
В інтервалі 0 < w < 1 значення Re (w) і Q (w) більше нуля (перший квадрант), при 1 < w < 7. Визначити стійкість замкнутої автоматичної системи регулювання, що представлена на рис. 7.9. Характеристичне рівняння розімкнутої системи (р - 1) = 0 має один корінь в правій півплощині (k =1), тобто розімкнута система нестійка.
Побудуємо АФХ замкнутої системи. W p(р) = 2,2/(р - 1); W (j w) = Re (w) + + jQ (w) = 2,2/(j w - 1).
При w = 0: Re (w) = - 2,2; Q (w) = 0. При w > 0 Re (w) < 0 і Q (w) < 0 (третій квадрант). При w ® ¥ Re (w) ® 0; Q (w) ® 0. АФХ розімкнутої системи починається на відрізку (-1; -¥) дійсної вісі (початкову точку у цьому випадку приймають за половину переходу) і охоплює критичну точку (-1; j 0) в позитивному напрямку при підвищенні w від 0 до ¥ 1/2 разів (рис. 7.10). Так як розімкнута система має один додатний корінь замкнута система стійка.
|
 (7.3)
(7.3)

 .
.



 (7.7)
(7.7)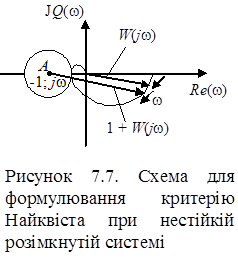




 ,
,  .
.



