
Выбор тиристорного преобразователяДля питания якорных цепей и цепей возбуждения двигателей главных электроприводов экскаватора выбирается тиристорный преобразователь. При выборе тиристорных преобразователей, из числа серийно выпускаемых необходимо руководствоваться следующим: номинальные значения напряжения Udн и преобразователя должны быть больше или равны номинальным значениям напряжения и тока двигателя (4.1), т.е.
Udн > Uн; Idн > Iн, (4.1)
Необходимо также обеспечить превышение максимального тока преобразователя над максимальным током двигателя (4.2), т.е.
Idmax> Imax, (4.2) Учитывая это условие, номинальный ток тиристорного преобразователя можно определить следующим образом: Idн > где
По номинальным параметрам выбираем тиристорный преобразователь серии ПТЭМ – 2Р (П – преобразователь, Т – тиристорный, Э – экскаваторный, М – моноблочный, 2 - порядковый номер разработки). Технические данные выбранных преобразователей представлены в таблице 4.1. Таблица 4.1. Технические данные тиристорных преобразователей ПТЭМ – 2Р
Данный тип преобразователя характеризуется повышенной надёжностью и помехозащищенностью благодаря безразъемным соединением всех внутренних цепей чайкой и рациональной компоновкой, сокращающей число и протяженность монтажных цепей. Преобразователь реверсивный и реверсом тока в якорной цепи с трехфазной мостовой встречно – параллельной схемой выпрямления, и раздельным управлением группами тиристоров. Преобразователи питаются от четырёх обмоточного трансформатора с номинальным первичным напряжением 6000 В. Экскаватор типа ЭКГ – 5А получает в забое электроэнергию от сети трехфазного тока напряжением 6кВ по кабельному отводу через распределительное устройство типа ЯКНО – 6 по гибкому кабелю. Кабель подключается к вводному ящику, установленному на нижней раме экскаватора. От него через кольцевой токоприемник, смонтированный между поворотной платформой и нижней рамой, ток подходит к разъединителю типа РВ–6/400 распределительного устройства типа КРУЭ–6, установленному на поворотной платформе внутри кузова экскаватора. От распределительного устройства через вакуумный выключатель питается силовой пяти обмоточный трансформатор. Все типоисполнения преобразователей типа ПТЭМ имеют два автоматических выключателя, один на стороне переменного, другой на стороне постоянного тока; число тиристоров в плече – 1; вид вентиляции – у первого и третьего габаритов – естественная, у четвертого – принудительная.
Силовая принципиальная схема электроприводов главных механизмов экскаватора ЭКГ-5 представлена на рисунке. 4.1. Пояснение к схеме: КРУ – комплектное распределенное устройство; TV – силовой трансформатор; QF – выключатель автоматический; ТП – тиристорный преобразователь; М – электродвигатель постоянного тока; L – сглаживающий дроссель; Р3 – реле защиты от замыкания на землю; V – вольтметр; UA, UV – датчики тока и напряжения; БР – блок регуляторов; СКА – сильсинный коммандоаппарат; RV – регулировочные сопротивления в цепях возбуждения двигателей; РТМ – реле максимального тока; KFA – реле минимального тока; ТК – кольцевой токоприемник; RS – шунт; Л, ЛУ – контактор силовых цепей; ЭТ – электромагнитный тормоз;
Силовая принципиальная схема электропривода главных механизмов экскаватора ЭКГ-5
Рисунок 4.1. Расчет мощности и выбор силового трансформатора серийных тиристорных преобразователей носит поверочный характер и направлен на определение их параметров. При этом учитываются следующие основные величины: а) номинальное выпрямленное напряжение и ток преобразователя; б) напряжение питающей сети; в) допустимые колебания напряжения сети; г) число фаз первичной и вторичной обмоток трансформатора; д) частота сети.
Расчет начинается с определения требуемого вторичного напряжения трансформатора:
U2ф=Еdo /Ксх, (4.4)
где Ксх = 2,34 – коэффициент, зависящий от схемы выпрямления [4]; Еd0 – максимальное значение ЭДС преобразователя (4.5):
где Idн – номинальное значение выпрямленного тока преобразователя; Rя – активное сопротивление двигателя; аВ – коэффициент, зависящий от схемы выпрямления [4]; DUВ – падение напряжения на тиристоре; в, СТ, d – расчетные коэффициенты, [4]; eк%, DРМ% - напряжение короткого замыкания и потери в меди трансформатора; DUс% - возможные колебания напряжения сети.
В случае, когда к проектируемому электроприводу предъявляются высокие требования в отношении быстродействия при обработке различного рода возмущений за счет изменения напряжения преобразователя, подводимого к двигателю, величину amin следует принимать равным 25 ÷ 30°. Величина коэффициента Ксет обычно выбирается в пределах 1,3 ÷1,5. Принимаем amin=30°, Ксет =1,3.
Номинальное значение ЭДС двигателя:
Ен=Uн – Iн ×Rя80°с, (4.6)
Rя80°=1,24×(Vя20°+Vgп20°). (4.7)
Расчетная мощность трансформатора собственных нужд определяем по формуле:
S=Кп×Еdo×Idн, (4.8)
где Кп = 1,045 – коэффициент, зависящий от схемы выпрямления [4]. Расчет мощности трансформатора для главных механизмов экскаватора сведена с учетом представленных формул в таблицу 4.2.
Таблица 4.2 - Расчет мощности трансформатора
На возбуждение и собственные нужды выбираем мощность трансформатора: Sвозб = 15 кВ×А. Определяем необходимую суммарную мощность трансформатора:
StS = SST, (4.9)
StS = 328+107+257+15=707 кВ×А. По полученным значениям выбираем трансформатор типа ТСЗП – 1000/6 – ЭК – ХЛ2 (сухой, защищённый). Технические характеристики трансформатора сведены в таблицу 4.3.
Таблица 4.3 - Технические данные трансформатора ТСЗП – 1000/6 –ЭК – ХЛ2
4.3 Расчёт и выбор сглаживающего дросселя
Сглаживающий дроссель включается последовательно с якорем двигателя и его индуктивность выбирается из следующих условий: а) сглаживание пульсаций выпрямленного тока до требуемой величины, обеспечивающей удовлетворительную коммутацию двигателя; б) обеспечение непрерывности выпрямленного тока при минимальной нагрузке на валу двигателя. Максимальное значение выпрямленной ЭДС Еdo при a = 0:
Еdo=1,35×U2л, (4.10)
где U2л=U2ф - линейное напряжение вторичной обмотки трансформатора.
Полное сопротивление фазы трансформатора, приведенное на вторичной обмотке:
Z2ф =
Активное сопротивление фазы трансформатора:
Индуктивное сопротивление фазы трансформатора:
Индуктивность фазы трансформатора:
LТ =
Критическая индуктивность силовой цепи ТП - Д, обеспечивающая уменьшение пульсации выпрямленного тока:
где Ednm - амплитуда основной гармонической выпрямленной ЭДС n - го порядка;
Р(1)% - допустимое действующее значение основной гармоники переменной составляющей выпрямленного тока, обычно 2÷ 15%.
Критическая индуктивность силовой цепи ТП-Д, обеспечивающая ликвидацию прерывистого режима на холостом ходу двигателя:
где Iяхх = 0,1×Iн - принятый ток холостого хода двигателя, равный 15 А.
кФ= Rэ – эквивалентное сопротивление силовой цепи системы ТП-Д:
Rэ=1,1×Rя80°+аВ×
Индуктивность сглаживающего дросселя:
Lc=Lкр-Lя-аВLT = -1,48∙10-5 Гн, (4.20)
где Lя - индуктивность якоря двигателя (4.21):
b = 0,6 - эмпирический коэффициент; Р - число пар полюсов.
Из двух значений критической индуктивности выбираем большее и определяем индуктивность сглаживающего дросселя. Из расчетных данных видно, что для электропривода механизма напора сглаживающий дроссель не требуется.
Эквивалентная индуктивность силовой цепи системы ТП – Д:
Lэ=Lя+аВ×LT, (4.22)
Lэ = 0,0063+2×0,000424 = 7,1×10-3 Гн
4.4 Расчёт основных параметров силового оборудования механизма подъёма Расчет основных параметров силового оборудования механизма подъёма экскаватора Основные параметры силовой части электропривода, необходимые для расчета системы регулирования приведены в таблице 4.4.
Таблица 4.4 -Основные параметры силовой части электропривода
В этом случае регулировочные характеристики СИФУ Ed = f (Uу) для тиристорного преобразователя питающего якорь двигателя рассчитываются по уравнению (4.27):
где aнач=( 90°+120°). Принимаем a1нач=a2нач=105°.
В этом случае регулировочные характеристики «разведены» и переход от выпрямительного режима в инверторный происходит с зоной нечувствительности.
Uоп.ш=10В - опорное напряжение СИФУ, соответствующее изменению угла на 90°.
Рассчитанные регулировочные и фазные характеристики приведены в табл. 4.5, а зависимость Ed=f(Uу) - на рис. 4.2.
Таблица 4.5 - Регулировочные и фазные характеристики ТП
Максимальный угол регулирования:
amax£180°-(g+d+Da), (4.31)
где g = угол коммутации (4.29);
g=arccos aн= arcсos=
g=arccos
d - угол восстановления запирающих свойств тиристора;
Максимальный угол регулирования с точки зрения безопасности работы в инверторном режиме принимается
Рисунок 4.2 – Регулировочные характеристики тиристорного преобразователя
Рисунок 4.3 – Фазовые характеристики тиристорного преобразователя
Коэффициент усиления тиристорного преобразователя определяем по формуле:
Электромагнитная постояннаявремени силовой цепи в системе ТП – Д Тэ = Lэ/Rэ, (4.26) Тэ = 7,1∙10-3 / 0,04 = 0,081 с
|
 Iн, (4.3)
Iн, (4.3) - перегрузочная способность тиристорного преобразователя в течение 10 с.
- перегрузочная способность тиристорного преобразователя в течение 10 с.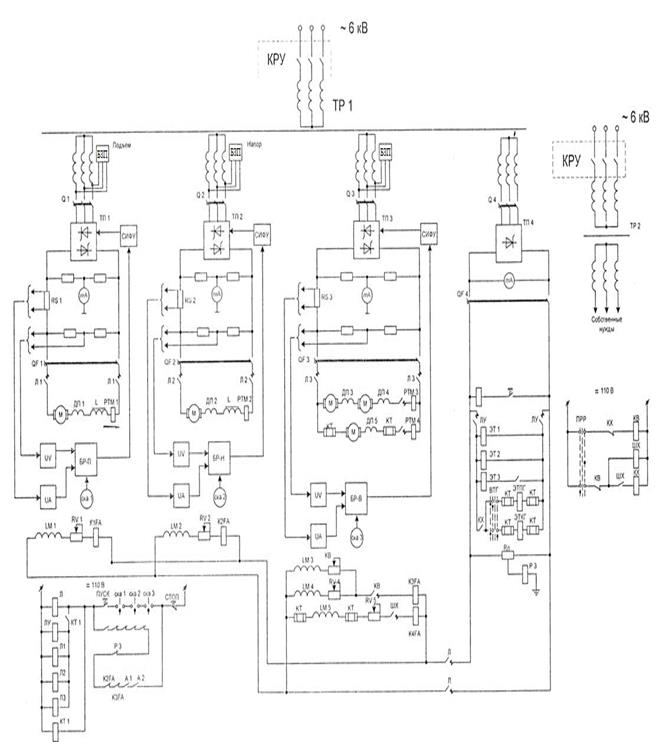
 , (4.5)
, (4.5) . (4.11)
. (4.11) , (4.12)
, (4.12) (4.13)
(4.13) = 0,000424 Гн, (4.14)
= 0,000424 Гн, (4.14) = 0,005 Гн, (4.15)
= 0,005 Гн, (4.15) (4.16)
(4.16) - амплитуда основной гармонической ЭДС в функции угла a [4];.
- амплитуда основной гармонической ЭДС в функции угла a [4];. = 0,007 Гн, (4.17)
= 0,007 Гн, (4.17) = 0,709 (4.18)
= 0,709 (4.18) =2,3 - постоянная двигателя при Ф = const; B∙с.
=2,3 - постоянная двигателя при Ф = const; B∙с. . (4.19)
. (4.19) = 0,0063 Гн, (4.21)
= 0,0063 Гн, (4.21)






 (4.30)
(4.30) , (4.32)
, (4.32) arcсos
arcсos  ;
; .
. - допустимая асимметрия импульсов.
- допустимая асимметрия импульсов.
 , тогда:
, тогда:


 , используя зависимость Ed=f(Uу).
, используя зависимость Ed=f(Uу).


