
Этапы выполнения курсовой работы
Выполнение курсовой работы можно разделить на следующие этапы: 1. анализ задания на курсовую работу; 2. подбор элементной базы для разрабатываемого МИУУ; 3. разработка структурной схемы МИУУ; 4. разработка принципиальной электрической схемы МИУУ; 5. расчет аналогового преобразователя (АП) сигнала от датчика к АЦП; 6. расчет выходного каскада для усиления выходного сигнала ЦАП; 7. расчет цепей питания, цепей подачи сигнала сброса RESET; 8. разработка алгоритма работы и программного кода для МИУУ; 9. оценка характеристик полученного МИУУ; 10. описание результатов проектирования. Этапы 2-7 могут выполняться параллельно. Этапы 5 и 6 могут отсутствовать в случае, если АП и/или выходной усилительный каскад не требуются. Наличие или отсутствие последних определяется диапазоном выходного сигнала с датчика и значением выходного сигнала ЦАП, подаваемого на исполнительное устройство, а также соответствующими параметрами АЦП и ЦАП, которые будут подобраны для разрабатываемого МИУУ. Рассмотрим подробно некоторые этапы.
Подбор элементной базы для разрабатываемого МИУУ
Подбор элементной базы МИУУ следует осуществлять в соответствии с приводимыми далее общими рекомендациями и рекомендациями для каждого элемента. Если этим рекомендациям будут соответствовать несколько микросхем, то можно выбрать любую из них.[1]
Общие рекомендации Элементную базу для МИУУ следует подбирать таким образом, чтобы все микросхемы были согласованы между собой по уровням входных и выходных токов и напряжений на линиях ввода/вывода. Информация об этих электрических параметрах содержится в соответствующих разделах технических описаний на каждую подбираемую микросхему. Также рекомендуется обеспечить единое напряжение питания одного номинала (например, 5 В) для всех потребителей, входящих в состав МИУУ. Величина тока на выходе цепи питания определяется, исходя из суммарной потребляемой мощности всех компонент МИУУ.
Подбор датчика Подбор датчика следует осуществлять в соответствии со следующим алгоритмом: 1. найти датчики, осуществляющие измерение заданного параметра в заданном диапазоне; 2. среди отобранных датчиков найти датчики с необходимым типом и диапазоном выходного сигнала; 3. выбрать из отобранных датчиков тот, который является наиболее подходящим по эксплуатационным характеристикам: допустимые параметры окружающей среды, напряжение питания и рабочий ток (при необходимости) и т.д.
Подбор АЦП АЦП может быть как встроенным в микроконтроллер, так и являться самостоятельной микросхемой. Также АЦП может быть или универсальным, или специализированным под определенный тип входного аналогового сигнала. Если АЦП является встроенным, то подбор его осуществляется в рамках подбора микроконтроллера в целом. Микроконтроллеры со встроенными АЦП очень распространены. Параметры, по которым следует выбирать АЦП, если он является самостоятельной микросхемой, следующие: - количество каналов ввода аналогового сигнала; - время преобразования; - разрядность; - тип цифрового выходного интерфейса (только не для встроенных АЦП). Остальные параметры являются не менее значимыми при выборе конкретного АЦП, но в рамках данной курсовой работы перечисленных выше параметров будет достаточно для подбора конкретной микросхемы. Минимальные требования к АЦП, как к самостоятельной микросхеме: - тип АЦП – параллельный/следящий/последовательного приближения; - количество каналов ввода аналогового сигнала – 1; - количество разрядов выходного кода – 10; - выходной интерфейс – параллельный/SPI/I2C/UART(USART).
Подбор ЦАП ЦАП так же, как и АЦП, может быть встроенным в микроконтроллер или являться отдельной микросхемой. Если ЦАП является встроенным, то подбор его осуществляется в рамках подбора микроконтроллера в целом. Параметры, по которым следует выбирать ЦАП, если он является самостоятельной микросхемой, следующие: - количество каналов вывода аналогового сигнала; - тип выходного аналогового сигнала; - разрядность; - тип цифрового входного интерфейса (только не для встроенных ЦАП). Остальные параметры являются не менее значимыми при выборе конкретного ЦАП, но в рамках данной курсовой работы перечисленных выше параметров будет достаточно для подбора конкретной микросхемы. Минимальные требования к ЦАП, как к самостоятельной микросхеме: - тип ЦАП – любой; - количество каналов вывода аналогового сигнала – 1; - количество разрядов входного кода – 10; - входной интерфейс – параллельный/SPI/I2C.
Подбор драйвера интерфейса RS-232 Драйвер интерфейса RS-232 является стандартной микросхемой, которая выпускается большим количеством фирм. К одному и тому же драйверу в зависимости от модели микросхемы можно подключать различное число устройств. Для разрабатываемого в курсовой работе МИУУ достаточно подобрать такой драйвер интерфейса, к которому можно подключить не более двух устройств по интерфейсу RS-232. Приведём примеры таких микросхем: ADM202, ADM203, MAX232, ST232 и многие другие.
Подбор драйвера выходного интерфейса Драйвер выходного интерфейса может находиться на борту специализированного микроконтроллера или быть отдельной микросхемой. В последнем случае он обычно является стандартной микросхемой также как и драйвер интерфейса RS-232. Если драйвер выходного интерфейса встроен в микроконтроллер, то его подбор превращается в подбор самого микроконтроллера (см. пункт подбор микроконтроллера). Приведём примеры таких микроконтроллеров для различных интерфейсов: - интерфейс USB 2.0: AT90USB82, AT90USB162, AT90USB646; - интерфейс CAN: AT90CAN32, AT90CAN64, AT90CAN128, PIC18F8680; Если драйвер выходного интерфейса представляет собой отдельную микросхему, то в этом случае параметры подбора следующие: - количество портов ввода/вывода информации; - интерфейс сопряжения с микроконтроллером. Для разрабатываемого МИУУ достаточно, чтобы у драйвера выходного интерфейса был один порт ввода/вывода информации. Интерфейсом сопряжения с микроконтроллером напрямую может быть UART (USART), SPI, I2C. В некоторых случаях в промежуток между микроконтроллером и драйвером выходного интерфейса нужно поставить драйвер интерфейса RS-232. Приведём примеры микросхем драйверов различных интерфейсов: - интерфейс USB 2.0: PDIUSBD11, PDIUSBD12, FT8U232BM, FT8U245AM, FT2232HQ; - интерфейс CAN: MCP2515; - интерфейс RS-422: ADM489, MAX1483, DS26LS31, ST485; - интерфейс RS-485: ADM485, MAX1482, ST485; - радиоканал: AT86RF212, AT86RF230; - радиоканал стандарта ZigBee: EM250, EM260, PAN4570; - интерфейс Ethernet: NE-4110S.
Подбор драйвера (контроллера) ЖКИ Драйвер (контроллер) ЖКИ также как и драйвер выходного интерфейса может находиться в составе специализированного микроконтроллера или быть отдельной микросхемой. В первом случае ситуация полностью аналогична той, которая рассмотрена в предыдущем подразделе. Приведём примеры таких микроконтроллеров: ATmega169, ATmega329, MAXQ2010. Если драйвер (контроллер) ЖКИ является отдельной микросхемой, то параметры его подбора следующие: - количество линий управления сегментами ЖКИ; - интерфейс сопряжения с микроконтроллером. Остальные параметры являются не менее значимыми при выборе конкретного драйвера (контроллера) ЖКИ, но в рамках данной курсовой работы перечисленных выше параметров будет достаточно для подбора конкретной микросхемы. Количество линий управления сегментами ЖКИ должно быть равным количеству выводов ЖКИ или превосходить его. Интерфейсом сопряжения с микроконтроллером может быть UART (USART), SPI, I2C, параллельный интерфейс. Примеры контроллеров ЖКИ: HD44780, KS0066.
Подбор индикатора Существует довольно большое количество индикаторов различных типов. В данной курсовой работе рассматриваются семисегментные индикаторы и матрично-строковые ЖКИ. В каждом варианте присутствует только один тип ЖКИ либо его нет в варианте. 1. Семисегментный индикатор Для МИУУ следует подобрать индикатор, состоящий из четырёх или больше семисегментных индикаторов, либо сделать составной индикатор из нескольких семисегментных индикаторов. Эти индикаторы могут быть как статическими, так и динамическими. Например, индикатор CA04-41SRWA фирмы Kingbright. И статические, и динамические индикаторы могут быть двух типов: с общим анодом(-ами) и с общим катодом(-ами). От этого зависит способ подключения индикатора к специализированному микроконтроллеру или драйверу (контроллеру) ЖКИ. В курсовой работе рекомендуется использовать индикатор с общим анодом(-ами). 2. Матрично-строковый ЖКИ Для МИУУ следует подобрать ЖКИ с количеством строк не более 2 и количеством символов в строке не более 20. Например, 2х16 (две строки по 16 символов в каждой). Часто такие ЖКИ размещаются на отдельной печатной плате, на которой также размещён и контроллер ЖКИ. Например, ЖКИ с контроллером HD44780 или KS0070.
Подбор микроконтроллера Микроконтроллер может быть как универсальным, так и специализированным для выполнения каких-либо конкретных задач. Микроконтроллер следует выбирать из следующих соображений: - микроконтроллер должен иметь количество вводов/выводов, достаточное для подключения к нему всех необходимых устройств; - микроконтроллер должен поддерживать передачу данных по интерфейсам, имеющимся в выбранных АЦП и ЦАП, а также в драйвере ЖКИ, если он входит в состав МИУУ; - флэш-память программ и память данных должны иметь размер, подходящий для решения поставленной задачи. Количество вводов/выводов, достаточное для подключения всех устройств, оценивается, исходя из того, сколько интерфейсных линий и линий сигналов управления имеют все периферийные устройства, вместе взятые. Поясним сказанное выше на примере. Пусть имеются АЦП AD7731 (4+2)[2], ЦАП AD5330 (8+6) и драйвер интерфейса RS-232 ADM202 (2). Получаем: 4+2+8+6+2=22. Следовательно, нужно подобрать контроллер минимум с тремя 8-разрядными портами ввода/вывода (3´ 8=24). В данном случае можно использовать, например, микроконтроллер ATmega16 с четырьмя 8-разрядными портами ввода/вывода (4´ 8=32). Посмотрим, какие интерфейсы есть на борту у микроконтроллера ATmega16. В его составе имеются: USART, SPI, I2C (TWI). С помощью перечисленных интерфейсов можно подключить все необходимые устройства: АЦП (SPI), ЦАП (параллельный), ЖКИ (I2C), драйвер интерфейса RS-232 (USART). Следовательно, микроконтроллер ATmega16 поддерживает передачу данных по интерфейсам, имеющимся во всех периферийных устройствах.
Разработка структурной схемы МИУУ
На структурной схеме МИУУ должны быть отображены все основные компоненты, а также обозначены все цифровые интерфейсы и диапазоны аналоговых сигналов между ними. Пусть, например, есть МИУУ, в состав которого входят: - микроконтроллер ATmega16; - АЦП AD7731; - ЦАП AD5330; - драйвер интерфейса RS-232 ADM202 с портом RS-232; - аналоговый преобразователь (АП). Тогда структурная схема МИУУ будет выглядеть примерно так, как показано на рисунке 2. Персональный компьютер, исполнительное устройство и стрелки к ним показаны пунктиром, так как они не входят в состав МИУУ. Тем не менее, датчик показан сплошными линиями, хотя он также не является частью МИУУ. Это сделано потому, что датчик входит в число устройств, которые нужно подобрать. Рисунок 2. Пример структурной схемы МИУУ. Если одно или несколько устройств (например, АЦП и драйвер выходного интерфейса) находятся в составе специализированного микроконтроллера (например, AT90USB82), то тогда на структурной схеме МИУУ это будет выглядеть так, как показано на рисунке 3. Рисунок 3. Пример структурной схемы МИУУ со специализированным микроконтроллером.
Разработка принципиальной электрической схемы МИУУ
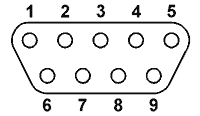
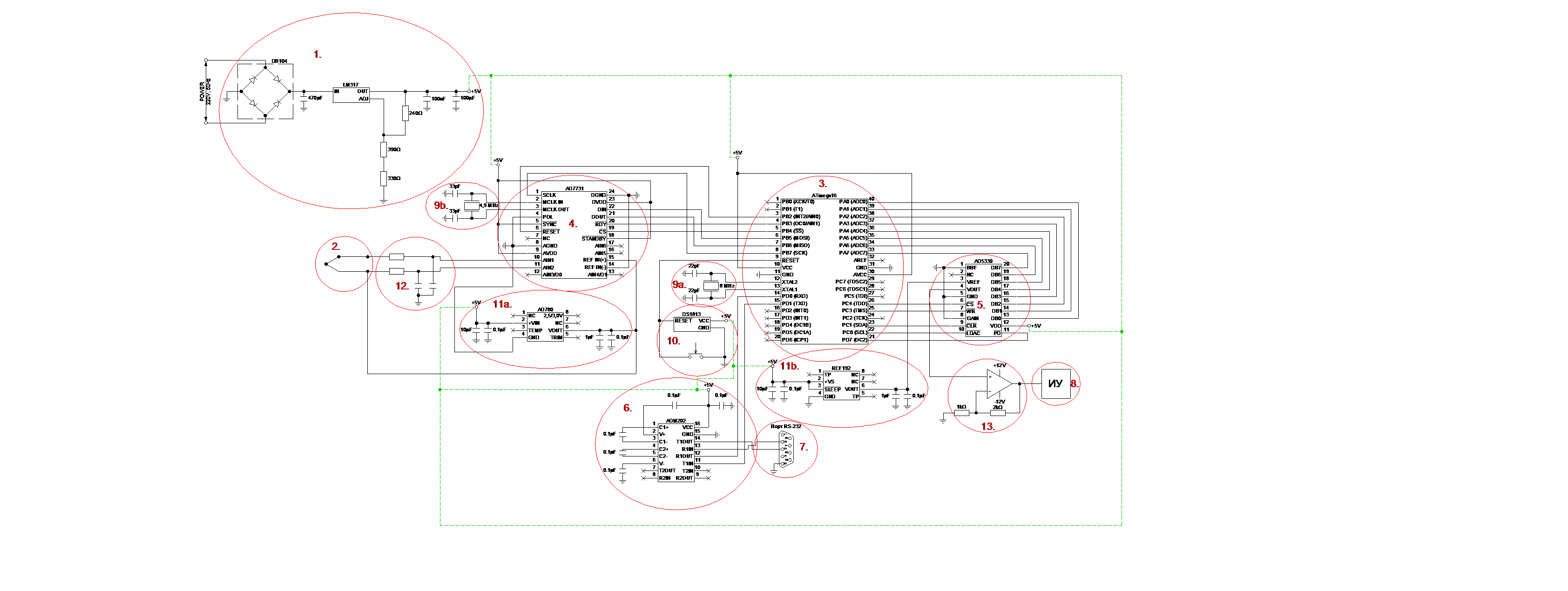
На принципиальной электрической схеме МИУУ должны быть отображены все основные компоненты, входящие в структурную схему устройства, и все интерфейсы и другие линии связи между ними. А также на схеме должны быть отображены все компоненты, необходимые для обеспечения работы МИУУ: - генератор тактовых импульсов (кварцевый резонатор) для микроконтроллера; - генераторы тактовых импульсов (кварцевые резонаторы) для АЦП и ЦАП (при необходимости); - цепи питания всех устройств, входящих в состав МИУУ; - микросхемы дополнительного питания (при необходимости); - цепи подачи сигнала сброса RESET на микроконтроллер, АЦП и ЦАП; - разъёмы для подключения внешних устройств и антенна (если она есть). На рисунке 5 в качестве примера приведена принципиальная электрическая схема МИУУ, структурная схема которого приведена на рисунке 2. Далее будут приведены описания и комментарии по каждому фрагменту схемы. 1. Цепь питания МИУУ.[3] Цепь питания МИУУ состоит из следующих компонент: - однофазный диодный мост DB104; - интегральный стабилизатор напряжения LM317; - резисторы и емкости (номиналы подписаны на схеме). 2. Датчик. Датчик должен отображаться схематично в виде того чувствительного элемента (переменная емкость, переменное сопротивление и т. д.), который используется для осуществления измерений того или иного параметра. Если изобразить чувствительный элемент не представляется возможным, то в этом случае датчик отображается в виде черного ящика с выходящими из него линиями передачи аналогового сигнала. 3. Микроконтроллер. Микроконтроллер изображается в виде прямоугольника с выходящими из него линиями выводов. Каждая линия вывода должна быть пронумерована в соответствии с реальной конфигурацией микроконтроллера, а также около каждой линии должно стоять её наименование. Далее приведены расшифровки наименований некоторых линий [3]: - PA0…7 – порт ввода/вывода А; - PB0…7 – порт ввода/вывода В; - PC0…7 – порт ввода/вывода С; - PD0…7 – порт ввода/вывода D; - RESET – вход сигнала RESET; - VCC, AVCC – входы напряжения питания; - AREF – вход опорного напряжения АЦП; - GND – земля; - XTAL1, XTAL2 – входы сигнала тактовой частоты; - ADC0…7 – линии каналов АЦП; - SCK – выход сигнала тактовой частоты SPI; - MISO – вход данных SPI; - MOSI – выход данных SPI; - SS – выход сигнала выбора устройства SPI; - RXD – вход данных UART; - TXD – выход данных UART; - SDA – линия данных I2C (TWI); - SCL – линия тактового сигнала I2C (TWI); - INT0…2 – входы запросов на прерывание от внешних устройств. В схеме на рисунке 5 порт А целиком работает на передачу данных ЦАП, часть линий порта С предназначена для подачи сигналов управления на ЦАП, линии РВ4…7 порта В работают как линии интерфейса SPI, а линии РВ2 и РВ3 предназначены для подачи и приёма сигналов с АЦП, PD0 и PD1 работают как линии интерфейса UART. 4. АЦП. Изображается на схеме так же, как и микроконтроллер. Расшифровка основных линий [6]: - AVDD, DVDD – входы напряжения питания; - AGND, DGND – земля; - AIN1…6 – каналы ввода аналогового сигнала; - REF IN(+), REF IN(–) – входы опорного напряжения; - DIN – линия входа данных; - DOUT – линия выхода данных; - SCLK – линия тактового сигнала интерфейса; - CS – вход сигнала выбора устройства; - RDY – выход сигнала готовности данных - MCLK IN, MCLK OUT – входы внешнего тактового сигнала; - POL – вход управления полярностью тактового сигнала; - RESET – вход сигнала сброса. В схеме на рисунке 5 линии DIN, DOUT, SCLK, CS образуют интерфейс SPI; к линиям MCLK IN, MCLK OUT подключён внешний кварцевый резонатор; на линии AIN1, AIN2 подаётся аналоговый сигнал от датчика температуры (термопара); 5. ЦАП. Изображается на схеме так же, как и микроконтроллер. Расшифровка основных линий [4]: - VDD – вход напряжения питания; - GND – земля; - DB0…7 – входы линий передачи данных; - VOUT – линия выходного напряжения; - VREF – вход опорного напряжения; - CS – вход сигнала выбора устройства; - GAIN – вход сигнала выбора коэффициента усиления; - WR – управляющий сигнал чтения данных; - CLR – управляющий сигнал очистки регистров ЦАП. В схеме на рисунке 5 линия VOUT подключена к выходному усилительному каскаду, на линию VREF подаётся опорное напряжение от ИОН, линии DB0…7 подключены к порту А микроконтроллера, через который осуществляется передача данных на ЦАП 6. Драйвер RS-232. Изображается так же, как и микроконтроллер. Расшифровка основных линий [5]: - VCC – вход напряжения питания; - GND – земля; - R1IN, R2IN – входы линий приёма данных; - R1OUT, R2OUT – выходы линий приёма данных; - T1IN, T2IN – входы линий передачи данных; - T1OUT, T2OUT – выходы линий передачи данных; В схеме на рисунке 5 к линиям R1IN, T1OUT подключён разъём порта RS-232, а линии R1OUT, T1IN соединены с микроконтроллером. 7. Разъёмы для подключения внешних устройств бывают самыми разнообразными. В рамках курсовой работы рассмотрим разъёмы типов DB (рисунок 4), RJ45 и USB типа b.
Рисунок 4. Схематичное изображение разъема DB-9. Первый тип разъема будем использовать для внешних устройств (потребителей информации), подключаемых по интерфейсам RS-232, RS-422, RS-485 и CAN. Второй – для устройств, подключаемых по Ethernet. А третий – для устройств, подключаемых по USB. В схеме на рисунке 5 разъём типа DB подключён к выходам микросхемы ADM202 драйвера интерфейса RS-232. 8. ИУ Изображается в виде черного ящика с подходящей к нему линией подачи управляющего напряжения от ЦАП или от выходного каскада усиления. 9. Кварцевый резонатор. Кварцевый резонатор (9а) нужен для генерации тактовой частоты для микроконтроллера. Один из вариантов его подключения к зарезервированным выводам XTAL1 и XTAL2 микроконтроллера (например, ATmega16) представлен на рисунке 5. Кварцевый резонатор для АЦП (9b) выполняет ту же функцию, что и кварцевый резонатор для микроконтроллера, но используется только в случае необходимости. Подключение может осуществляться аналогично тому, как показано на рисунке 5 к соответствующим выводам АЦП. Номинальные значения частот и емкостей определяются, исходя из рекомендаций, указанных в технических описаниях на микросхемы микроконтроллера и АЦП. 10. Пример цепи подачи сигнала сброса RESET с помощью кнопки и микросхемы DS1813 на соответствующий вывод микроконтроллера показан на рисунке 5 [7]. 11. Микросхемы дополнительного питания (источники опорного напряжения, ИОН) нужны для преобразования стандартного входного напряжения в напряжение питания, необходимое работы для конкретной микросхемы или части её. Емкости и сопротивление подбираются таким образом, чтобы обеспечить требуемый уровень опорного напряжения VREF. Расшифровка основных линий [5]: - +VIN – вход напряжения питания; - GND – земля; - VOUT – выход опорного напряжения. 12. АП В схеме на рисунке 5 аналоговый преобразователь представлен упрощённой цепью подключения термопары к АЦП. 13. Усилительный каскад В схеме на рисунке 5 представлен один из простейших вариантов неинвертирующего усилителя, построенного на операционном усилителе. Коэффициент усиления этого усилителя равен 3.
Рисунок 5. Пример принципиальной электрической схемы МИУУ Расчет аналогового преобразователя сигнала от датчика
Прежде чем производить расчет аналогового преобразователя сигнала, нужно выбрать его тип. Аналоговым преобразователем может быть: - токоограничительный резистор; - делитель напряжения; - каскад с операционным усилителем; - мостовая схема; - и т.п. Выбор конкретного типа аналогового преобразователя осуществляется исходя из входного диапазона АЦП и типа датчика, а также рекомендаций по схеме подключения последнего. Непосредственный расчет аналогового преобразователя осуществляется с использованием законов Кирхгофа и Ома по соответствующим методикам [3].
Расчет выходного каскада для усиления выходного сигнала ЦАП
Выходной усилительный каскад строится в большинстве случаев на основе операционного усилителя. Непосредственный расчет выходного усилительного каскада осуществляется с использованием законов Кирхгофа и Ома по соответствующим методикам.
Разработка алгоритма работы и программного кода для МИУУ
Программный код для МИУУ разрабатывается на основе алгоритма, блок-схема которого представлена на рисунке 6. Выделенная пунктирной линией часть алгоритма между вводом данных с АЦП и выводом данных на ЦАП является индивидуальной для каждого варианта. Программа должна выполнять следующие действия: - считывать текущее значение измеряемого параметра с АЦП; - сравнивать текущее значение измеряемого параметра с константой, равной значению середины диапазона измеряемого сигнала, т.е. - в зависимости от результата сравнения присваивать выходной переменной, значение которой будет передаваться на ЦАП, цифровой код, эквивалентный значению 0, 25UmaxЦАП или 0, 75UmaxЦАП; - передавать на ЖКИ текущее значение измеряемого параметра (если требуется); - передавать в ЦАП значение выходной переменной; - передавать текущее значение измеряемого параметра по выходному интерфейсу внешнему потребителю. В блоке проверки условия следует записать условие, указанное в варианте задания на курсовую работу (например, Т< Тзад). Рисунок 6. Блок-схема алгоритма программы для МИУУ
Языком программирования, на котором рекомендуется писать программу для микроконтроллера, находящегося в составе МИУУ, является ассемблер или С/С++. В полном техническом описании микроконтроллера обычно присутствуют примеры кода как на ассемблере, так и на С, которые помогут в разработке конкретной программы для разрабатываемого МИУУ. Программный код должен содержать в себе основную программу и следующие подпрограммы: - подпрограмма ввода данных о текущем значении измеряемого параметра с АЦП; - подпрограмма вывода данных о текущем значении измеряемого параметра на ЖКИ (если ЖКИ имеется в составе разрабатываемого МИУУ); - подпрограмма вывода значения выходного параметра на ЦАП; - подпрограмма передачи данных о текущем значении измеряемого параметра внешнему потребителю; - подпрограмма обработки прерывания по сигналу сброса RESET. Рекомендуется использовать механизмы системы прерываний для реализации некоторых подпрограмм.
Ниже рассмотрены действия, которые нужно совершить для инициализации различных внутренних периферийных устройств микроконтроллера (на примере микроконтроллера ATmega16, если не указан другой).
Инициализация UART (USART) Для того чтобы инициализировать интерфейс USART, нужно: - в регистре UCSRB (регистр управления и состояния USART B): · установить в 1 разряды c 3 по 7; - в регистре UCSRC (регистр управления и состояния USART C): · установить в 1 разряд URSEL; · установить в разряде UMSEL режим работы USART согласно таблице 63; [4] · установить в разрядах UPM0, UPM1 количество битов чётности согласно таблице 64; · установить в разряде USBS количество стоповых битов согласно таблице 65; · установить в разрядах UCSZ0, UCSZ1 и разряде UCSZ2 регистра UCSRB количество битов данных в передаваемом пакете согласно таблице 66; - в регистрах UBRRH и UBRRL установить в разрядах UBRR11…UBRR0 значение скорости передачи данных согласно таблицам 68–71.
Инициализация SPI Для того чтобы инициализировать интерфейс SPI, нужно в регистре SPCR (регистр управления интерфейсом SPI): - установить в 1 разряды SPIE, SPE, MSTR; - установить в разрядах CPOL и CPHA режим работы интерфейса SPI (согласно таблицам 56 и 57); - установить в разрядах SPR0, SPR1 регистра SPCR и разряде SPI2X регистра SPSR значение частоты тактового сигнала SCK (согласно таблице 58);
Инициализация I2C (TWI) Для того чтобы инициализировать интерфейс I2C (TWI), нужно: - в регистре TWBR (регистр скорости передачи данных интерфейса I2C (TWI)) установить значение коэффициента, соответствующее нужной частоте тактового сигнала SCL, которая вычисляется согласно формуле:
- в разрядах TWPS1 и TWPS0 регистра TWSR (регистр состояния интерфейса I2C (TWI)) установить согласно таблице 73 значение коэффициента предварительного делителя, соответствующее нужной частоте тактового сигнала SCL, вычисляемой по формуле из предыдущего пункта; - установить в 1 разряды TWIE, TWEN и TWEA регистра TWCR (регистр управления интерфейсом I2C (TWI)); - установить в 1 все разряды регистра TWDR (регистра данных интерфейса I2C (TWI));
Инициализация внутреннего АЦП микроконтроллера Для того чтобы инициализировать внутренний АЦП микроконтроллера, нужно: - в регистре ADMUX: · выбрать источник опорного напряжения, установив необходимое значение в разрядах REFS1 и REFS0 согласно таблице 83; · установить в 0 разряд ADLAR; · выбрать используемые каналы АЦП и коэффициент усиления сигнала, установив необходимое значение в разрядах MUX4…MUX0 согласно таблице 84; - в регистре ADCSRA (регистр А управления и состояния АЦП): · установить в 1 разряды ADIE, ADEN; · в разрядах ADPS2…ADPS0 установить значение коэффициента предварительного делителя частоты согласно таблице 85;
Инициализация ЖКИ Рассмотрим инициализацию ЖКИ на примере микроконтроллера ATmega169. Чтобы инициализировать ЖКИ нужно: - в регистре LCDCRA (регистр А управления ЖКИ) установить в 1 разряды LCDEN, LCDAB и LCDIE; - в регистре LCDCRB (регистр B управления ЖКИ): · в разряде LCD2B установить значение bias; · в разрядах LCDMUX1 и LCDMUX0 установить согласно таблице 94 значение duty cycle; · в разрядах LCDPM2…0 установить согласно таблице 95 значение, соответствующее используемому количеству сегментных линий; - в регистре LCDFFR (регистр частоты кадров ЖКИ): · в разрядах LCDPS2…0 установить согласно таблице 96 значение предварительного делителя частоты, соответствующее частоте работы ЖКИ; · в разрядах LCDCD2…0 установить значение division ratio согласно таблице 97; - в регистре LCDCCR (регистр управления контрастом ЖКИ) в разрядах LCDCC3…0 установить согласно таблице 99 значение напряжения, подаваемого на сегменты ЖКИ;
Инициализация стека Для того чтобы инициализировать стек микроконтроллера, нужно в регистры SPL и SPH (младший и старший регистры указателя вершины стека) записать адрес ячейки памяти данных, с которой будет начинаться стек.
Оценка характеристик разработанного МИУУ
В рамках курсовой работы нужно оценить следующие характеристики МИУУ: - диапазон аналогового сигнала, измеряемого датчиком; - диапазон аналогового сигнала, подаваемого на исполнительное устройство; - погрешность измерений аналогового сигнала с датчика; - погрешность управляющего аналогового сигнала на выходе ЦАП; - время прохождения одной итерации цикла работы МИУУ. Первые две характеристики определяются, исходя из заданных в задании на курсовую работу параметров. Погрешность измерений аналогового сигнала с датчика определяется, исходя из погрешности датчика, указанной в его паспорте или другом документе, описывающем его. Погрешность управляющего аналогового сигнала на выходе ЦАП определяется двумя составляющими: погрешностью преобразования ЦАП и погрешностью усилительного каскада. Время прохождения одной итерации цикла работы МИУУ можно определить, проведя прогон программы в симуляторе и посмотрев его результаты. Если нет возможности это сделать, то в таком случае параметр можно определить вручную. Для этого каждой команде программы нужно поставить в соответствие количество тактов, необходимое для её выполнения, определить общее количество тактов одной итерации цикла, а затем умножить его на время выполнения одного такта.
Описание результатов и выводы по курсовой работе
Описание результатов курсовой работы должно включать в себя перечисление всего, что было сделано студентом или студентами во время выполнения курсовой работы. Например: Во время выполнения курсовой работы были получены следующие результаты: - произведён подбор всех необходимых компонент для МИУУ, - разработаны структурная и принципиальная электрическая схемы МИУУ, - осуществлён расчет всех цепей питания, цепи подачи сигнала RESET и аналогового преобразователя сигнала от датчика на основе мостовой схемы, - написана на языке ассемблера и протестирована в симуляторе программа для микроконтроллера, - произведена оценка характеристик получившегося МИУУ. Выводы по курсовой работе должны говорить о том, выполнено задание на курсовую работу или нет, и, если выполнено, то в каком объёме. Также следует описать возможности по перспективному использованию результатов выполненной курсовой работы. Например: По описанным выше результатам можно сделать вывод, что все задачи, поставленные в рамках курсовой работы, выполнены. В дальнейшем возможны модернизация, физическая реализация и внедрение разработанного МИУУ. Также возможно использование данной разработки в учебном процессе с целью демонстрации студентам принципов работы различных микропроцессорных устройств.
Варианты заданий на курсовую работу
Для всех вариантов: - максимальное значение напряжения выходного сигнала ЦАП или усилительного каскада должно равняться 10В; - заданное значение параметра в колонке «Условие» должно равняться середине диапазона измерения сигнала соответствующего датчика; - датчик должен иметь аналоговый выходной сигнал;
|
 ;
; ;
;


