Системы циклового программного управления станкамиПервые поколения металлорежущих станков с программным управлением имели цикловые системы управления (ЦПУ). Программа обработки выполнялась отдельными циклами, каждый из которых соответствовал одному переходу. Система ЦПУ позволяет частично или полностью программировать цикл работы станка, режим обработки и смену инструмента, а также задавать (с помощью предварительно налаживаемых упоров) величину перемещений исполнительных органов станка. Такая система монтировалась на базе универсального станка и позволяла запрограммировать последовательность и направление перемещения подвижных органов станка. Программирование режимов обработки ограничивалось конструкцией станка, в частности, наличием или отсутствием коробки скоростей и подач с возможностью дистанционного управления переключениями. В этом случае в необходимом месте программировалось включение соответствующего исполнительного механизма переключения скоростей или подач. Будучи аналоговой системой управления замкнутого типа, она обладает высокой гибкостью, обеспечивает легкое изменение последовательности включения аппаратов (электрических, гидравлических, пневматических и т. д.), управляющих элементами цикла. Преимущество системы ЦПУ: простота конструкции и обслуживания, а также низкая стоимость; недостаток — трудоемкость размерной наладки упоров и кулачков.
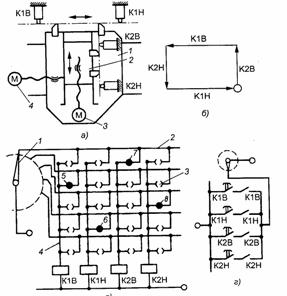
Станки с ЦПУ применяют в условиях серийного, крупносерийного и массового производства деталей простых геометрических форм. Этими системами оснащают токарно-револьверные, токарно-копировальные, лоботокарные, вертикально-фрезерные, копировально-фрезерные, вертикально-сверлильные, агрегатные станки, промышленные роботы (ПР) и др. Рисунок 3 - Функциональная схема системы ЦПУ В систему ЦПУ (рис.3) входит программатор циклов, схема автоматики, исполнительное устройство и устройство обратной связи. Само устройство ЦПУ состоит из программатора циклов и схемы автоматики. Программатор циклов состоит из блока 1 задания программы и блока 7 поэтапного ее ввода. Часть программы, одновременно вводимую в систему управления, называют этапом. Из блока 1 информация поступает в схему автоматики, состоящую из блока 2 управления циклом работы станка и блока 6 преобразования сигналов контроля. Действия программатора циклов с исполнительными органами станка и датчиком обратной связи согласует схема автоматики, которая усиливает и размножает команды и может выполнять ряд логических функций, в том числе реализацию стандартных циклов. Сигнал из блока 1 через блок 2 поступает в исполнительное устройство, которое обеспечивает отработку заданных программой команд: включает исполнительные элементы 3 (приводы исполнительных органов станка, электромагниты, муфты и т. д.) и исполнительные органы 4 станка (суппорты, револьверные головки, столы и т. д.). Окончание обработки контролирует датчик 5, который через блок 6 дает команду блоку 7 на включение следующего этапа программы. В качестве примера на рис.4,а приведена система ЦПУ станком, исполнительные органы которого (продольные 1 и поперечные 2 салазки) приводятся в движение от электродвигателей 4 и 3 соответственно. Перемещение салазок 1 ограничивают переключатели К1В и К1Н, а салазок 2 — переключатели К2В и К.2Н. Величину хода салазок задают упорами.
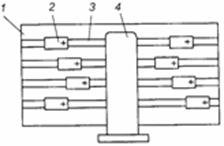
Широко распространенным электрическим программатором является штекерная панель, она вместе с шаговым искателем составляет командоаппарат (рис.4,в). Шаговый искатель состоит из контактного поля и ротора. Рисунок 4 - Система ЦПУ: а — кинематическая схема (1, 2— продольные и поперечные салазки соответственно; 3, 4 — электродвигатели); б — обрабатываемый цикл; в — штекерная панель с электромагнитом шагового искателя (1 — щетка; 2, 4— горизонтальная и вертикальная шины; 3 — штекерное гнездо; 5—8— штекеры); г — схема управления. Контактное поле представляет собой совокупность неподвижных контактных пластин, расположенных по окружности и изолированных друг от друга. Ротор изготавливают в виде щетки с электромагнитным приводом. Он состоит из электромагнита и храпового механизма. При поступлении на вход электромагнита импульсного сигнала ротор поворачивается на один шаг и коммутирует очередную пластину контактного поля. На штекерной панели монтируют горизонтальные 2 и вертикальные 4 шины, соединяя их соответственно с пластинами шагового искателя и с обмотками реле. Количество горизонтальных шин равно числу ходов цикла, а вертикальных шин — числу команд. В местах пересечения горизонтальных и вертикальных шин располагают штекерные гнезда 3. Они состоят из двух полуколец, одно из которых соединяют с горизонтальной шиной, а другое — с вертикальной. При установке штекера в гнездо, соответствующие шины соединяются, и срабатывает реле. При отсутствии штекера шины разомкнуты, и реле не срабатывает. Так, для программирования цикла (см. рис.4,а), содержащего четыре последовательных хода салазок 7 и 2 (К1В и К1Н — соответственно ход салазок 1 вперед и назад, К2В и К2Н — соответственно ход салазок 2 вперед и назад; рис.4,б), необходимо установить в гнезда штекерной панели штекеры 5, 6, 7 и 8 (см. рис.4,в). От шагового искателя, при включении станка, напряжение поступает на верхнюю горизонтальную шину штекерной панели. Срабатывает реле К2В (рис.3,г) и подает команду «Вперед» приводу поперечных салазок. Последние перемещаются вперед до срабатывания переключателя К2В. Контакты К2В замыкаются, что вызывает срабатывание электромагнита шагового искателя. Ротор искателя поворачивается на один шаг, верхняя шина и реле К2В обесточиваются и движение прекращается. Затем напряжение поступает на вторую горизонтальную шину: срабатывает реле К1В и подает команду «Вперед» приводу продольной подачи. Продольные салазки перемещаются справа налево до срабатывания переключателя К1В и, следовательно, шагового искателя; возникает сигнал К2Н (поперечные салазки перемещаются в начальное положение), а затем сигнал К1Н (продольные салазки перемещаются в начальное положение). Ротор шагового искателя на вспомогательном ходу возвращается в исходное положение, после этого цикл повторяется. Рисунок 5 -
Кулачковая панель: 1 — плита; 2— кулачки; 3— пазы; 4— путевые переключатели Штекеры в отверстия панели вставляет оператор непосредственно на станке. Для избегания ошибок программирования и его ускорения на штекерную панель накладывают бумажные шаблоны, на которых в соответствии с программой пробиты отверстия, через них штекеры вводят в гнезда панели. Для многократного использования исполнительных органов в цикле число конечных переключателей должно быть увеличено. В таких случаях для управления движением по каждой координатной оси целесообразно применять кулачковую панель (рис.5), представляющую собой плиту 1 с Т-образными пазами 3, в которых устанавливают кулачки, 2, взаимодействующие с блоком 4 путевых переключателей. Для задания команд существуют различные по конструкции программаторы. Например, кулачковый командоаппарат является программатором механического типа с кинематическим заданием программы. Его выполняют в виде барабана 1 с приводом 2 от электродвигателя со встроенным редуктором (рис.6,б). Барабан периодически поворачивается на определенный угол и фиксируется в заданном положении. На его цилиндрической поверхности, выполняющей роль панели, предусмотрены гнезда 3, в которые устанавливают штекеры (шарики или штифты). Количество гнезд по окружности барабана равно числу этапов программы, а вдоль образующей барабана — числу программируемых параметров. Информация считывается блоком 4 путевых переключателей; при наличии штекера переключатель срабатывает и выдает команду. Конструктивно кулачковый командоаппарат часто выполняют дисковым (рис.6,б). На торце диска 1, имеющего дискретный привод 2, сделаны гнезда. Информацию считывает блок 3 путевых переключателей. Командоаппарат со сменным алюминиевым диском 3 показан на рис.6,в. На диске записывают (путем пробивки в определенных местах отверстий 4) требуемую информацию, считывание которой осуществляет фотоэлектрический прибор. Диск можно использовать многократно. Дискретный привод командоаппарата состоит из электромагнита 1 и храпового механизма 2. Рисунок 6 - Программируемые командоаппараты (ПК), построенные на базе микроэлектроники, являются универсальными системами ЦПУ. Они представляют собой управляющие логические машины последовательного действия. Рисунок 7 -
Функциональная схема программируемого командоаппарата: 1 — центральный процессор; 2 — постоянное запоминающее устройство; 3 — входное устройство; 4 — сканатор; 5 — выходное устройство; б — программная панель Программируемый командоаппарат состоит из центрального процессора (управляющего устройства) 1, постоянного запоминающего устройства 2, входного 3 и выходного 5, устройств сканатора (генератора импульсов) 4 (рис.7). Программную панель 6 (загрузчик программ), оснащенную декадными переключателями и клавишами с обозначением логических элементов можно подключать к ПК. Программирование осуществляют последовательным нажатием клавишей. Программа записывается и запоминается в устройстве 2. В режиме работы сканатор 4 поочередно подключает к процессору 1 устройства 3 и 5. В процессоре 7 согласно программе выполняются заданные логические операции, преобразующие состояния входов в состояния выходов.
|