Блоки управления исполнительными механизмами.БУИМ – это программный модуль, содержащий сведения о подключаемых ИМ, определяющий совместно с ПС вид выходного сигнала и позволяющий подключать 1÷2 ВЭ для управления одним ИМ.
б)
в)
а – один ко одному (линейное); б – один ко одному (перекрестное); в – один ко многим.
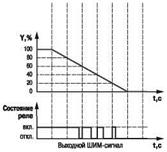
Для каждого БУИМ задаются следующие параметры: 1. Тип Исполнительного Механизма (параметр SE.P) – определяет тип ИМ, которым будет управлять данный БУИМ: - 2-х позиционным – ТЭНы, отсечные клапаны и т.д.; - 3-х позиционным – задвижки (с постоянной скоростью перемещения), трехходовые клапаны и т.д.; - ИМ с аналоговым управлением; 2. Ссылки № 1 и №2 на Вых. Элемент (два параметра ОР:1 и OP:2) – задают номер ВЭ МВУ8 или МР1, к которым подключают ИМ: - для управления 2-х позиционным или аналоговым ИМ следует задавать один ВЭ в параметре ОР:1; - для управления 3-х позиционным ИМ (задвижкой) следует задавать два ВЭ в параметрах ОР:1 иОР:2; 3. Верхний порог сигнала управления (параметр РСРН) – параметр, который для двухпозиционного ИМ вместе с гистерезисом определяет значение сигнала с СВ, при котором происходит скачкообразное изменение управляющего сигнала. Для аналогового ИМ определяет максимальное (для Нагревателей) или минимальное (для Холодильников) значение сигнала с СВ, при котором ИМ выдает 100% своей мощности. Задаётся в единицах величины, которая поступает на СВ; ВНИМАНИЕ! Напомним, что значение Нижнего порога задается в модуле ПС в соответствующем параметре отдельно для «Нагревателей» (параметр PC.L.P) и отдельно для «Холодильников» (параметр PC.L.O). Для Нагревателей верхний порог должен быть больше нижнего, для Холодильников – меньше нижнего порога. Для систем ИМ Нижний порог равен верхнему порогу предыдущего БУИМ (система ИМ – это группа ИМ одного типа, подключенная к одному ПС). 4. Управление 2-х позиционными ИМ. Имеет два состояния: «вкл.» и «выкл.». Для управления используется один дискретный ВЭ (реле, транзисторный ключ, симистор, твердотельное реле). Закон (способ) управления, задаваемый в ПС, может быть как линейным, так и ON/OFF. При линейном управлении 2-х позиционными ИМ на ВЭ подается ШИМ-сигнал (рис. 7). Как видно из рисунка широтно-импульсная модуляция сигнала заключается в выдачи импульсов с определенным периодом. Длительность импульса в % от периода равна управляющему сигналу в % от всего диапазона.
Рис. 7. Схема формирования ШИМ-сигнала.
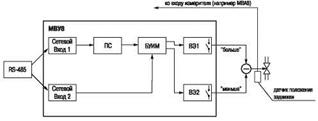
При линейном регулирования 2-х позиционным ИМ в папке соответствующего БУИМ задаются два параметра: 4.1. Период следования ШИМ-импульса ( параметр tHP) – задается в секундах; 4.2. Минимально допустимая длительность ШИМ-импульса ( параметр t.L) – задается в секундах. При ON/OFF управлении 2-х позиционным ИМ параметры ШИМ-сигнала можно не задавать. 5. Управление 3-х позиционными ИМ (задвижками с дискретным управлением) (рис. 8, 9). Управляется тремя сигналами: «больше»/ «меньше»/ «стоп». Для этого используются два дискретных ВЭ МВУ8: первый дает команду на открытие («больше»), второй - на закрытие («меньше»). Для реализации управления трехпозиционным ИМ необходима информация о положении задвижки в любой момент времени. Обеспечивается это двумя способами: 5.1. Использование 3-х позиционного ИМ с датчиком положения (рис. 8). Сигнал с датчика положения поступает на МВА8 далее по сети RS-485 на любой незанятый сетевой вход (на рис. 8 это СВ2) МВУ8 и далее на соответствующий БУИМ. Сигнал с датчика положения задвижки меняется в диапазоне 0÷100.
При таком управлении задают значения следующих параметров (в папке Параметры 3-х позиционного регулирования задвижки): - Наличие датчика положения ( параметр dLP) – указывает на наличие в системе датчика положения задвижки. Принимает значение «Есть» и «Нет». - Номер сетевого входа ( параметр i.DP) – позволяет задать номер сетевого входа МВУ8 на который поступает сигнал с датчика положения задвижки. 5.2. Использование 3-х позиционного ИМ без датчика положения (рис. 9).
Определить положение задвижки в этом случае можно с помощью математической модели ее перемещения. Для построения математической модели необходимо с максимальной точностью задать следующие параметры: - Полное время хода (параметр tP.H) – определяет время хода задвижки из одного крайнего положения в другое. Задается в секундах; - Начальное положение ИМ (параметр LSP) – задаётся в % хода задвижки; - Время выборки люфта (параметр tFP) – время, проходящее от момента подачи управляющего сигнала на вход ИМ до момента начала движения задвижки. Задаётся в секундах. ВНИМАНИЕ! - Управление без датчика положения недопустимо при использовании задвижек без концевых выключателей. - При пропадании питания может происходить «обнуление» данных, вычисленных по математической модели. 5.3. Зона нечувствительности задвижки (параметр db.F) – позволяет избежать частого переключения ВЭ, управляющих задвижками, при быстром изменении управляющего сигнала в МВУ8. Если управляющий сигнал меняется в пределах указанной зоны, состояние ВЭ прибора не меняется. Задаётся в %. ВНИМАНИЕ! При использовании задвижки с полным временем хода менее 10-15 с и датчиком положения, или при слишком большом периоде опроса датчиков положения любых других задвижек (1с и более) МВУ8 может не установить задвижку в требуемое положение (внутрь заданной зоны нечувствительности). Для предотвращения этого необходимо увеличить зону нечувствительности задвижки (параметр db.F) или сократить период опроса датчика положения. 6. Управление ИМ с аналоговым управлением. Аналоговое управление ИМ осуществляется ВЭ аналогового типа (ЦАП 4...20 мА или ЦАП 0.. 10 В). В МВУ8 аналоговое управление осуществляется по прямопропорциональному закону (т.е. 4 мА или 0 В должны соответствовать минимальной мощности ИМ, а 20 мА или 10 В должны соответствовать максимальной мощности ИМ). Для реализации аналогового управления необходимо подключить к БУИМ аналоговый ВЭ (параметр ОР). В зависимости от типа ВЭ и выбранного способа управления прибор может осуществлять интеллектуальное управление ИМ разными способами (табл. 5).
Табл. 5. Выходные сигналы МВУ8.
Указанные параметры задаются с помощью программы «Конфигуратор МВУ8», сгруппированные в папках БУИМ №1-№8 (подробнее см. раздел «Конфигуратор МВУ8»). МВУ8 можно использовать с модулем расширения МР1, для чего нужна расширенная версия «Конфигуратора МВУ8». При этом в Главном окне конфигуратора отобразятся папки, содержащие параметры дополнительных БУИМ (папки БУИМ №9-№16). ВНИМАНИЕ! Дополнительные БУИМ могут управлять только двухпозиционными ИМ, поскольку МР1 содержит только дискретные ВЭ (реле, ключ, симистор, твердотельное реле). С БУИМ преобразованный сигнал поступает на ВЭ МВУ8 или МР1.
|