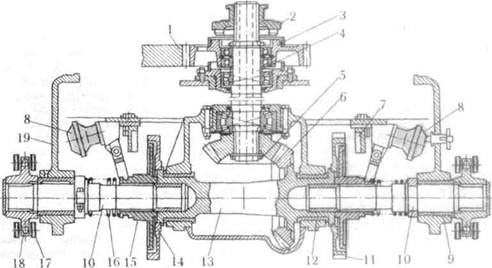
Механизмы передвижения универсальных гусеничных экскаваторовпринципиально не отличаются один от другого (рис. 182) Вертикальный вал 4 приводится в движение через кулачковую муфту 2, которая соединяет этот вал со свободно сидя щей на нем шестерней 3, вращающейся от шестерни 1меха низма поворота. На нижнем шлице вом конце вала, который установлен на сферических подшипниках, закрепленных в полой центральной цапфе ходовой рамы 19, поставлена коническая шестерня 5. Горизонтальный вал состоит из трех частей: средней 13, опирающейся на два разъемных бронзовых подшипника 12 ходовой рамы, и двух концевых 10 (полуосей). На средней части жестко укреплена коническая шестерня 6, с которой в постоянном зацеплении находится шестерня 5. По-.луоси одной стороной опираются на бронзовые втулки, запрессованные в торцы средней части вала; второй точкой опоры для них являются бронзовые втулки 9 в раме 19. На шлицевых консольных концевых частях вала, выходящих за пределы
Рис. 182. Механизм передвижения гусеничного экскаватора ЭО-4112: /, 8 — шестерни, 2 — муфта, 4 — вал, 5, 6 —конические шестерни, 7 -стопор, 8- мембранный пневмотолкатель, 9 - втулка. 10 — полуоси, // —- наружные зубья ведущей полумуфты. 12 — подшипник, 13 —ередняя пасть горизонтального вала, 14. 15 — полумуфты, 16 — пружина, /7 цепь, 18 звездочка, 19— рама
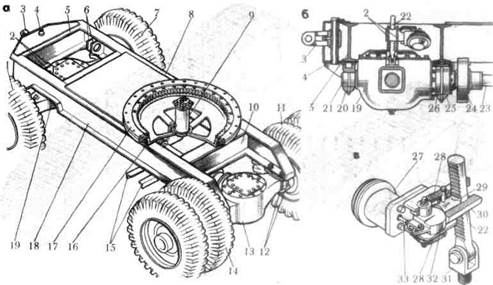
Рис. 183. Ходовая тележка гусеничного экскаватора: 1-' ведущее колесо, 2 — ходовая рама, 3 — гусеничная лента, 4 — опорный каток, 5—поддерживающий каток, 6 — стопор, 7 — механизм стопора, S — гусеничная рама, 9 — механизм натяжения гусеничных лент, 10 — опорно-поворотный круг,11 — вертикальный вал механизма передвижения, 12 — зубчатый венец, 13 — цепь, 14 — цепная звездочка ходовой рамы, укреплены ведущие звездочки 18 приводных втулочно-роликовых цепей 17. Вращение от средней части вала полуосям передается двумя кулачковыми муфтами. Ведущие полумуфты 14 неподвижно закреплены на средней части вала, а ведомые 15 перемещаются по шлицам вдоль полуосей. Обе кулачковые муфты горизонтального вала механизма передвижения постоянно включены пружинами 16 и все три части вала работают как одно целое. Движение от звездочек 18 (см. рис. 182) передается цепями звездочкам 14 (рис. 183), укрепленным на шлицах консольной части валов ведущих колес 1 гусеничных лент. Основными частями ходовой тележки являются ходовая рама, механизм передвижения и гусеничные тележки. Ходовая рама 2 служит опорой как для поворотной платформы, так и для валов механизма передвижения. Центральная часть ходовой рамы опира- ется на переднюю и заднюю балки, которые соединены с двумя гусеничными рамами 8. На правой и левой гусеничных рамах монтируют ведущие 1 и натяжные колеса, опорные 4 и поддерживающие 5 катки. Внутри гусеничных рам установлены стопорные устройства, предотвращающие перекатывание опорных катков по гусеничным лентам 3 во время разработки грунта, а также служащие для останова машины на уклонах. Верхние части гусеничных лент поддерживаются катками 5. К верхнему фланцу ходовой рамы крепят опорно-поворотный круг 10. Механизм передвижения пневмоко-лесного экскаватора (рис. 184). Поворотная платформа соединена с ходовой тележкой опорно-поворотным устройством 17 роликового типа. Ходовая рама, состоящая из продольных 8 и 18 и поперечных 5 и 10 балок, опирается на передний 19 и задний 13 мосты. Задний мост жестко
Рис. 184. Ходовая тележка пневмоколесного экскаватора: а —общий вид, б—установка балансирного переднего моста, в —стабилизатор; /, 7—колеса переднего моста, 2, б—кронштейны, 3— водило, 4— ось водила, 5, 8, 10, 18— балки рамы, 9— центральный пневмоввод, 11, /4—колеса заднего моста, 12— болты, 13, 19— задний и передний мосты, 15- кронштейн подножки; 16— опора, /7—опорно-поворотное устройство, 20, 25— разъемные опоры, 21. 26 —передняя и задняя цапфы, 22— рейка, 23— вал, 24— шкив, 27— пневмотолкатель, 28— пружина стабилизатора, 29— плунжер стабилизатора, 30— корпус, 31 — проушина, 32— эксцентрик, 33— шток соединен с рамой, а передний — шар-нирно, он имеет возможность поворачиваться относительно рамы в вертикальной плоскости. Передний мост установлен балансирно на двух цапфах 21 и 26, опирающихся на разъемные опоры 20 и 25. Выключают балансирную подвеску моста 19 с помощью левого и правого стабилизаторов, жестко соединяющих мост с рамой. Зубчатая рейка 22 стабилизатора нижним концом при помощи пальца шарнирно закреплена на картере переднего моста, верхняя часть рейки свободно проходит в отверстие корпуса 30 стабилизатора и при качании моста перемещается в нем в вертикальном направлении. На корпусе стабилизатора имеется пневмотолка-тель 27, который через шток 33, вилку и эксцентрик 32 при подаче воздуха воздействует на плунжер 29, прижимая его зубцы к зубцам рейки и фиксируя, таким образом, мост в неподвижном положении. При прекращении подачи воздуха (растормаживание колес) шток 33 пневмотолкателя поворачивает эксцентрик 32, освобождает плунжер 29,a пружины 28 оттягивают его от рейки. Включение стабилизаторов при транспортном передвижении экскаватора (в момент торможения) может вызвать зависание колес, занос машины и аварию. Поэтому при транспортном передвижении необходимо перекрыть доступ воздуха к пневмо-толкателям стабилизаторов, пользуясь крановым пневмоаппаратом. Экскаватор можно буксировать тягачом, для чего предусмотрено дышло, соединяемое с водилом 3. Контрольные вопросы 1. Как работают кулачковые муфты и подвижные шестерни? 2. Чем отличается фрикционная муфта от тормоза? 3. Для чего предназначена главная муфта? 4. Каково назначение главной лебедки при работе с различными видами рабочего оборудования? 5. Как различаются по конструкции и способу действия механизмы напора?
|