ФУНЦИОНАЛЪНАЯ СХЕМА СИСТЕМЫ УПРАВЛЕНИЯ ДВИЖЕНИЕМ
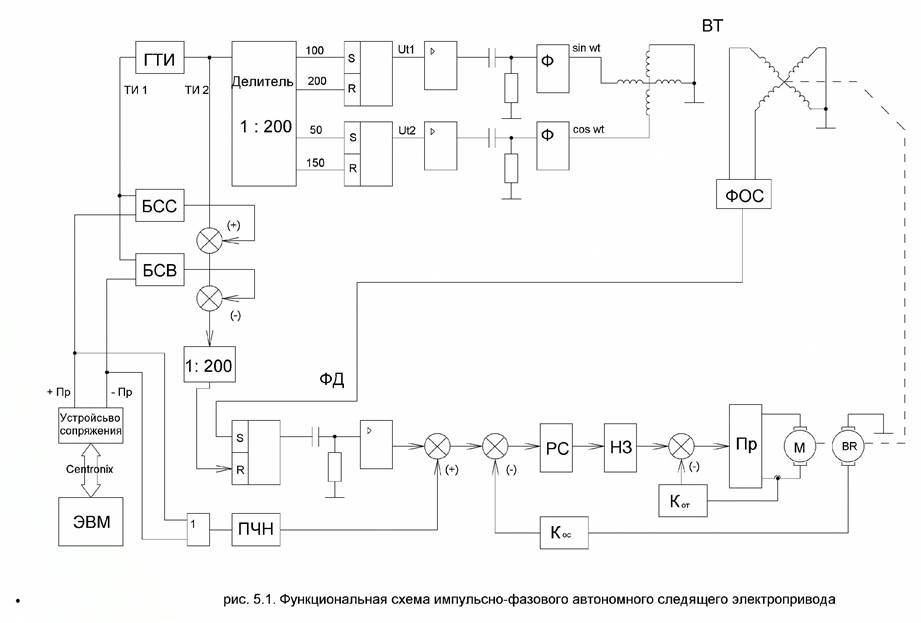
На рисунке 5.1 показана функциональная схема импулъсно-фазового следящего автономного привода по одной координате. Генератор тактовых импульсов ГТИ вырабатывает две несовпадающие последовательности импульсов ТИ1 и ТИ2 с частотой fген, из которых ТИ2 для формирования питающих напряжений вращающегося трансформатора ВТ, принятого в качестве датчика положения. Делитель Д1 имеет четыре выхода, на которых выделяются импульсы частотой ТИ2/кдел равномерно смещенные по фазе и обозначенные на рисунке цифрами 1 4. Эта последовательность импульсов заставляет триггеры Т1 и Т2 дискретного фазовращателя работать в таком режиме, при котором на их выходах появляются гармонические прямоугольные сигналы опорной частоты со скважностью 2, сдвинутые относительно друг друга на 90°. Далее с помощью разделительных конденсаторов C1, С2 получаются переменные составляющие U1, U2 с нулевым значением среднего напряжения в каждой последовательности. В фильтрах нижних частот из них выделяются синусоидальные сигналы, которые после усиления по мощности поступают в качестве питающих напряжений на статорные обмотки вращающегося трансформатора ВТ. Поскольку статорные обмотки ВТ сдвинуты в пространстве на 90° и питаются синусоидальными напряжениями с фазным сдвигом в 90 эл.град, в статоре возникает вращающееся магнитное поле с циклической частотой, равной частоте питания датчика, возбуждающее в роторной обмотке гармонический сигнал, фаза которого по отношению к опорному напряжению будет изменяться пропорционально углу поворота ротора вращающегося трансформатора. Синусоидальный сигнал роторной обмотки Uuc поступает на формирователь обратной связи (ФОС). Последовательность импульсов сигнала обратной связи поступает на вход S фазового дискриминатора, выполненного на триггере ТЗ. Па другой вход (R) триггера З поступают импульсы опорного сигнала Опорный сигнал Пд2 является выходом делителя Д2. на вход которого поступает последовательность импульсов ГИ2, к которой могут быть добавлены импульсы программы при перемещении «Вперед» (+Пр), или, наоборот, сняты отдельные импульсы этой последовательности при задании перемещения «Назад» (-Пр). Причем импульсы программы синхронизируются тактовыми импульсами ТИ1 в блоке синхронизации и сложения БСС (-Пр) или в блоке синхронизации и вычитания БСВ (+Пр). Триггер ТЗ фазового дискриминатора переключается непрерывно, и его выходной сигнал модулирован по ширине сигналом фазового рассогласования. Выходной сигнал ФД после усиления по мощности используется для управления приводом. С целью подавления основной гармоники сигнала фазового дискриминатора на его выходе установлена RC-цепочка. Сигнал управления приводом подается на вход регулятора скорости PC тиристорного регулируемого электропривода с обратной связью по скорости.
Для повышения быстродействия следящей системы и исключения скоростной ошибки введен блок скоростной компенсации, который при поступлении импульсов программы вырабатывает сигнал, пропорциональный частоте поступивших импульсов, полярность которого определяется каналом +Пр иди Пр, - напряжение па выходе блока преобразователя «частота-напряжение» ПЧН. Этот сигнал, усиливаясь по мощности, также поступает на вход РЭП. 5.1. Расчёт коэффициента делителя и выбор частоты питания датчика положения.
Для того чтобы обеспечить дискрету СЭП, равную d=0,001 мм необходимо рассчитать коэффициенты деления делителей Д1 и Д2 (рис. _?__) и выбрать необходимую частоту Исходя из принципа действия импульсно-фазовой следящей системы, сдвиг по фазе между выходными импульсами делителя Д2 и импульсами обратной связи ФОС, поступающими на фазовый дискриминатор, определяются по формуле
где n – число импульсов поступивших по каналу +Пр или –Пр;
Цена одного импульса в угловых дискретах
При поступлении одного импульса -Пр или +Пр привод должен отработать перемещение, равное дискрете d=0,001 мм. В соответствии с кинематической схемой привода, угловое перемещение определится по формуле
где
Радиус приведения механизма определяется шагом ходового винта
тогда угловое перемещение находим по ()
Следовательно по формуле () можем определить коэффициент деления делителя
Примем частоту тактовой последовательности
По условию задания датчик положения – вращающийся трансформатор, работающий в фазовом режиме. Примем датчик типа ВТМ – 1В. Основные характеристики датчика приведены в таблице ____.
5.2. ФОРМИРОВАТЕЛЬ ИМПУЛЬСОВ ОБРАТНОЙ СВЯЗИ
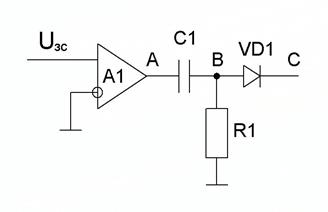
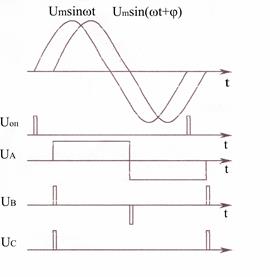
Функциональная схема формирователя импульсов обратной связи и его временная диаграмма работы представ лена на рисунке 5.2. Синусный сигнал роторной обмотки Uuc поступает на формирователь обратной связи, где он усиливается по амплитуде на операционном усилителе А1, ограничивается, приближаясь по форме к прямоугольному, дифференцируется с помощью дифференцирующей RC цепочки и положительные импульсы используются в качестве сигнала обратной связи. Импульсы, возникающие при переходе через нуль сигнала Uuc из положительных значений в отрицательные, шунтируются диодами формирователя.
а) б)
Рис. 5.2. Функциональная схема (а) формирователя импульсов обратной связи и временная диаграмма работы (б) ФИ.
5.3. ИМПУЛЬСНО-ФАЗОВЫЙ ПРЕОБРАЗОВАТЕЛЬ.
В состав импульсно-фазового преобразователя входят блоки синхронизации и сложения (БСС), синхронизации и вычитания (БСВ) и два делителя Д1 и Д2.
5.3.1. УЗЕЛ СИНХРОНИЗАЦИИ И СЛОЖЕНИЯ (ВЫЧИТАНИЯ).
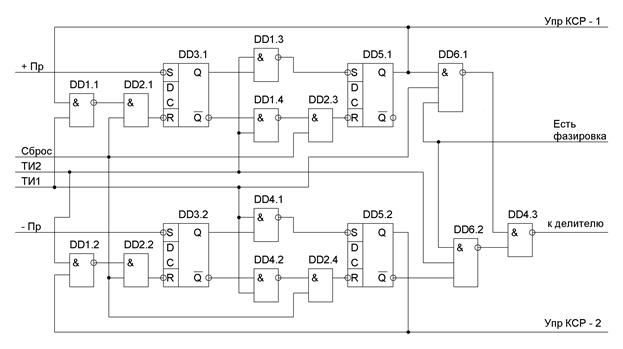
Функциональная схема узла сложения и вычитания приведена на рисунке 5.3. В задачу этого узла входит управление частотой следования импульсов заполнения счетчика 1:200 таким образом, чтобы при поступлении импульсов программы по каналу прямого перемещения (+Пр) частота следования импульсов увеличивалась, а по каналу реверса (-Пр) - уменьшалась. Для обеспечения устойчивости работы узла синхронизации в каналах прямого перемещения и реверса введена «двойная память», т.е. каждый элемент памяти дублируется и перепись из первичного элемента памяти во вторичный осуществляется с помощью прямого парафазного кода при подаче тактовых импульсов па элементы DD1.3, DD1.4, DD4.1 и DD4.2. В качестве первичных элементов памяти используются статические триггеры DD3.1 и DD3.2 вторичных - триггеры DD5.1 и DD5.2. Импульс «Сброс» устанавливает триггеры в исходное состояние. Импульсы программы отсутствуют. С инверсного выхода DD5.2 на DD6.2 подается логический уровень «1», разрешающий прохождение тактовых импульсов ТИ2 на вход делителя 1:200.
рис. 5.3. Принципиальная схема узла синхронизации и сложения-вычитания.
Импульс программы, поданный по каналу прямого перемещения (+Пр) опрокидывает триггер DD3.1. Очередной импульс ТИ2 производит перепись в триггер вторичной памяти DD5.1. С DD5.1 на DD1.1 и DD6.1 поступит уровень «1». Очередной тактовый импульс ТИ1 проходит через элементы DD6.1 и DD4.3 и попадает в серию тактовых импульсов ТИ2, поступивших на вход делителя, а также возвращает триггер первичной памяти Т1 в исходное состояние. В итоге на вход делителя 1:200 поступит серия тактовых импульсов ТИ2, включающая в себя один импульс ТИ1. Таким образом выполняется операция синхронизации и сложения. Временные диаграммы показаны на рисунке 5.4. (а).
а)
б)
рис.5.4. Временные диаграммы блока синхронизации и сложения (а) и блока синхронизации и вычитания (б).
Работа канала реверса (-Пр) аналогична работе канала прямого перемещения (+Пр). Различие состоит в том, что с инверсного плеча DD5.2 в течение одного такта на элемент DD6.2 подается уровень «О», запрещающий прохождение тактового импульса ТИ2. В итоге на вход делителя 1:200 поступает серия тактовых импульсов ТИ2 в которой отсутствует один из импульсов. Таким образом выполняется операция синхронизации и вычитания. Временные диаграммы показаны на рисунке 5.4. (б). С приходом последующих импульсов программы по каналам прямого перемещения или реверса цикл повторяется.
5.3.2 ДЕЛИТЕЛЬ
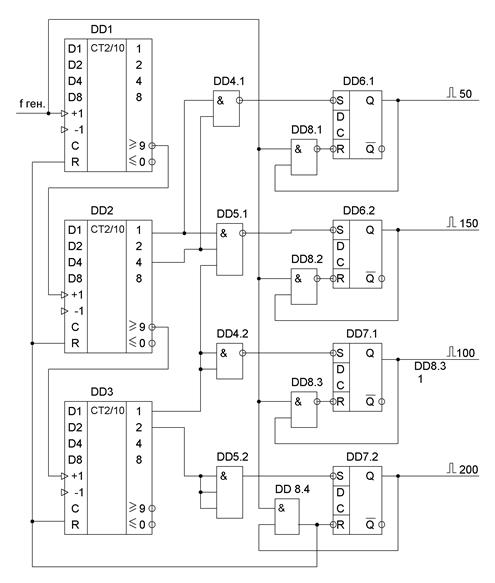
Для функционирования системы, делитель Д1 (рисунок 5.5) должен не только понизить частому тактовых импульсов fген = 100кГц до частоты питания датчика положения fдат = 500 Гц, но и сформировать по четырем каналам 50-й, 100-й, 150-й и 200-й импульсы. Делитель работает следующим образом. Тактовая последовательность ТИ2 частотой fген = 100кГц поступает на двоично-десятичный счетчик (микросхемы D1, D2, D3), на выходе которого непрерывно растет двоично-десятичный код, соответствующий поступившему числу импульсов. При поступлении 50 импульса, Nсч = 1010000 триггер D6 установится в единичное состояние (Q=l). Появление на выходе триггера единицы, через инвертор инициализирует сброс триггера. Таким образом на выходе D6 сформируется 50-й импульс с длительностью, равной длительности импульса последовательности ТИ2. Аналогично формируется 100-й3 150-й и 200-й импульсы. 200-й импульс обнулит все счетчики и процесс счета возобновится сначала. Делитель Д2 (рисунок 5.1) работает аналогичным образом, только счет импульсов не ведётся.
рис. 5.5. Принципиальная схема счётчика-делителя на 1: 200.
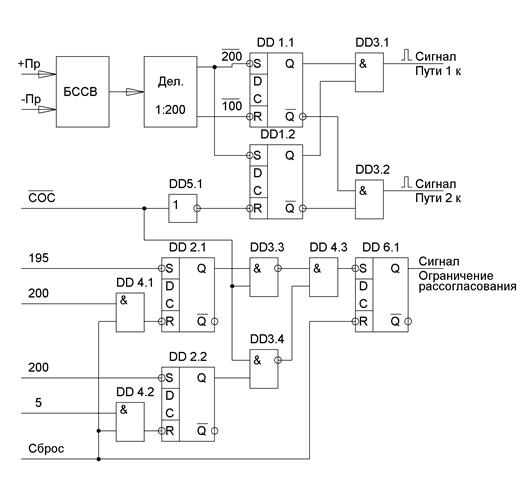
5.3.3 ФАЗОВЫЙ ДИСКРИМИНАТОР
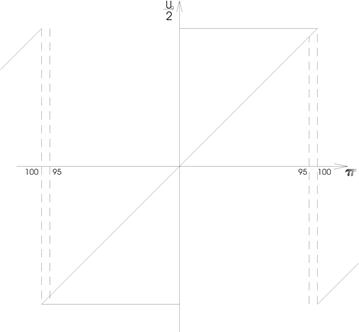
Этот узел служит для преобразования модулированных по фазе импульсных сигналов делителя (1:200) и импульсов, поступающих с формирователя сигнала обратной связи, в широтно-модулированный сигнал управления (рисунок 5.6). Фазовый дискриминатор сравнивает по фазе сигнал заданного положения рабочего органа станка (с делителя 1:200) с сигналом истинного положения и вырабатывает на основе этого сравнения сигнал рассогласования по пути, который и является управляющим сигналом для привода по каналу главной обратной связи. При наличии сигнала компенсации скоростного рассогласования, сигнал рассогласования по пути является по существу корректирующим при отклонении фактической скорости привода от заданной. Фазовый дискриминатор состоит из двух триггеров DD 1.1, DD 1.2 и двух сборок DD 3.1, DD 3.2. Каждый 200-й импулёс с делителя Д2 подается на S-входы триггеров DD 1.1, DD 1.2. На R-вход DD 1.1 подается каждый 100-й импульс, а на R-вход DD 1.2 подается предварительно инвертированные импульсы ФОС. Импульсные сигналы с прямых выходов DD 1.1, DD 1.2 собираются на элементе DD 3.1, а с инверсных - на DD 3.2. При отсутствии импульсов программы и неподвижных рабочих органах станка сдвиг между последовательностью импульсных сигналов 200 и ФОС составляет 180°, Триггеры переключаются с частотой 50Гц. Скважность импульсов на выходах фазового дискриминатора равна 2 и управляющее воздействие, определяемое постоянной составляющей импульсного сигнала, равно нулю. При поступлении импульсов программы частота следования импульсов с выхода делителя увеличивается или уменьшается в зависимости от направления перемещения. Сдвиг по фазе между импульсами с делителя Д2 и импульсами сигнала обратной связи становится не равным 180°. Скважность сигналов на одном из входов фазового дискриминатора становится отличной от 2-х. Сигналы первого и второго путевых каналов поступают на привод через ключи связи и узлы развязки.. Здесь же показан узел ограничения по рассогласованию, служащий для формирования команды «Ограничение рассогласования» и отключения командных импульсов при возникновении рассогласовании больше чем на ±95 дискрет. Элементы памяти DD 2.1, DD 2.2 и DD 6.1 устанавливаются в исходное состояние импульсом «Сброс». В рабочем режиме DD 2.1 перебрасывается 195 и 200 импульсами поочередно, образуя зонe разрешения для импульсов ФОС. Если импульс ФОС находиться в интервале между 195 и 200 импульсами, то триггер DD 6.1 выдает в узел контроля ограничения рассогласования. То же самое происходит при попадании импульса ФОС в интервал между 200 и 5 импульсами. После устранения неисправности схема возвращается в исходное состояние импульсом «Сброс». Характеристика вход-выход имеет вид, показанный на рисунке 2.7. Коэффициент передачи фазового дискриминатора
где Uо - напряжение по амплитуде, поступающее на фильтр с выхода каждого канала. Напряжение Uо настраивается с помощью резисторов на уровне 10В.
рис 5.6 Принципиальная схема фазового дискриминатора и узла ограничения рассогласования.
рис. 5.7 Характеристика «Вход-Выход» фазового дискриминатора. 5.3.4. КАНАЛ СКОРОСТНОЙ КОМПЕНСАЦИИ
Канал компенсации скоростной ошибки формирует напряжение, пропорциональное заданной скорости привода и состоит из формирователя импульсов постоянной длительности, блока потенциальной развязки и узла согласования с приводом, в котором импульсы формируются по амплитуде и усредняются за период следования, т.е.
где А - амплитуда;
Импульс «Сброс» устанавливает триггеры DD2.1, DD2.2 в исходное состояние (рисунок 2.8) и производится сброс 4-разрядного двоичного счетчика. С триггеров DD2.1, DD2.2 на схему управления ключами связи и на элементы DD1.3, DD1.4 поступает уровень «О», запрещая прохождение через них тактовых импульсов ТИ1, ТИ2. При поступлении импульса программы по канал прямого перемещения в узле синхронизации вырабатывается сигнал управления УпрКСР-1, равный по длительности одному такту. Этот разрешающий сигнал поступает на элемент DD1.1 очередной тактовый импульс ТИ1 проходит через DD1.1 и опрокидывает триггер DD2.1. Уровень «1» с выхода триггера DD2.1 поступает на схему управления ключами и на элемент DD1.4, разрешая прохождение через него тактовых импульсов ТИ1. Эти импульсы проходят через собирающую схему DD4.1 и поступает на вход счетчика импульсов. Состояние 4-х разрядов счетчика анализируется дешифратором, в качестве которых используется схема DD6. После подачи на вход счетчика тактовых импульсов, в нем будет записан двоичный код 1110, и элемент DD6 сформирует уровень 0, который вернет Т1 в исходное состояние, запрещающее дальнейшее прохождение тактовых импульсов ТРИ. С приходом следующего импульса цикл повторяется. Таким образом, формируется сигнал компенсации скоростного рассогласования в виде прямоугольных импульсов постоянной длительности, следующих с частотой импульсов программы. Длительность импульсов можно дискретно регулировать, настраивая с помощью переключателей число поступивших тактовых импульсов (состояние счетчика), при которых дешифратор 6 вырабатывает импульс, формирующий заданный фронт напряжения Т1а. Длительность импульса можно регулировать от 1 до (24-1)=16 тактовых импульсов. Максимальная длительность не должна превышать период следования импульсов программы при работе привода на максимальной частоте следования. При работе по каналу реверса (-Пр) процессом формирования импульсов канала скоростной компенсации управляет триггер DD2.2 и сформированные импульсы с частотой следования импульсов программы проходят по другому каналу (сигн.скор.Пк.). Эти импульсы, прежде чем поступить на вход привода, проходят через блок потенциальной развязки, обеспечивающий гальваническую развязку цепей питания логических узлов устройств ЧПУ от схемы управления приводом, и поступают на вход блока ключей связи БКС.
рис. 5.8. Принципиальная схема канала компенсации скоростной ошибки.
5.3.5. УЗЕЛ СОГЛАСОВАНИЯ С ПРИВОДОМ
Узел согласования с приводом служит для согласования выходов блоков управления ЧПУ с выходами приводов подач, Он преобразует импульсные сигналы задания скорости и пути в аналоговые с уровнем ±10В. В устройстве ЧПУ сигнал задания скорости подачи выдается по двум каналам в зависимости от направления движения в виде последовательности прямоугольных импульсов с постоянной амплитудой и длительностью (40-120мкс) и переменной частотой (0 - 8кГц), определяемой скоростью перемещения; Сигнал задания пути формируется также по двум каналам в виде прямоугольных широтно-модулированных импульсов с частотой
где
V - скорость перемещения, мм/мин; t - шаг датчика, мм.
рис. 5.8. Принципиальная схема узла согласования с электроприводом.
Скважность импульсов определяется рассогласованием по положению. При пулевом рассогласовании скважность импульсов по обоим каналам равна двум. Преобразование сигналов в блоках согласования по всем каналам одинаково и заключается в гальваническом разделении входа от выхода (оптронная пара светодиод-фотодиод), усиления импульсов напряжения по мощности, фильтрация и суммирования на входе операционного усилителя. В блоках предусмотрена возможность изменения коэффициента передачи отдельно по контуру регулирования скорости и регулирования пути, что облегчает настройку всей системы в целом. Параметры фильтров также могут быть изменены в соответствии с требуемым быстродействием и степенью сглаживания выходного сигнала.
5.4. РАБОТА СЛЕДЯЩЕГО ПРИВОДА.
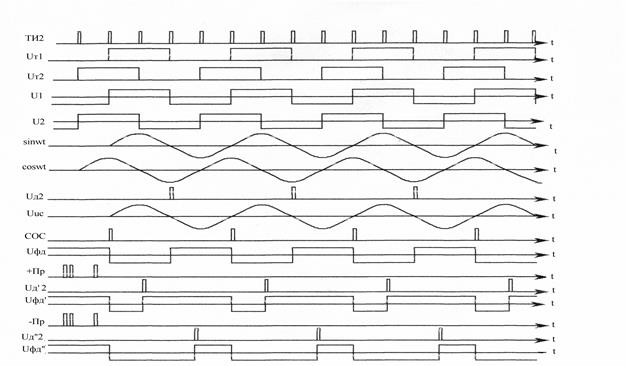
Рассмотрим работу системы импулъсно-фазового следящего привода (рисунок 5.1). Временные диаграммы работы системы представлены на рисунке 5.9. Рассмотрим работу схемы при отсутствии импульсов программы. В качестве исходного принимаем такое положение ротора ВТ, при котором импульсы СОС и импульсы Uд2 сдвинуты на 180°. Выходное напряжение фазового детектора после компенсации постоянной составляющей выходного напряжения триггера ТЗ симметрично относительно временной оси и сигнал рассогласования по перемещению Us (среднее значение напряжения ИФД) равно нулю. Пусть теперь по каналу +Пр поступило 40 импульсов и, следовательно, 200-йимпульс делителя Д2 появляется раньше и диаграммы импульсов Ud2 относительно СОС в сторону опережения по фазе, триггер ТЗ имеет несимметричную картину переключений и на выходе усилителя появляется сигнал Uфд среднее значение которого имеет положительный знак. Наоборот, если поступают управляющие импульсы по каналу -Пр (40 импульсов) из последовательности ТИ2 будут удалены 40 импульсов и двухсотый
Рис. 5.9. Временные диаграммы работы СЭП.
|
 генератора тактовых импульсов ГТИ и частоту питания вращающегося трансформатора
генератора тактовых импульсов ГТИ и частоту питания вращающегося трансформатора  .
.
 - коэффициент деления делителя.
- коэффициент деления делителя.

 - цена одного импульса, в линейном перемещении;
- цена одного импульса, в линейном перемещении; - радиус приведения механизма продольного перемещения привода подачи фрезерного станка.
- радиус приведения механизма продольного перемещения привода подачи фрезерного станка.
 ,
, .
. .
. 100 кГц, тогда частота питания датчика положения составит
100 кГц, тогда частота питания датчика положения составит .
.

 (2.5)
(2.5) - длительность импульсов;
- длительность импульсов; - частота следования импульсов программы.
- частота следования импульсов программы.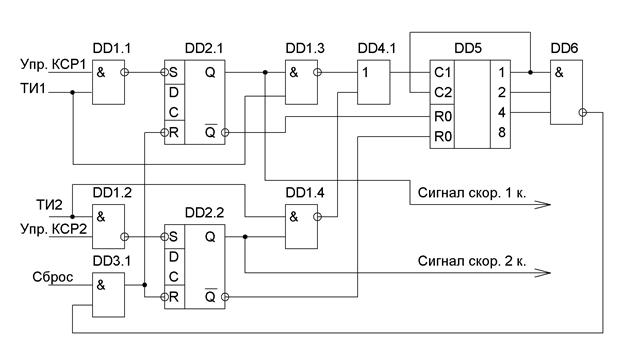

 - частота питания датчика обратной связи по положению;
- частота питания датчика обратной связи по положению; - приращение частоты
- приращение частоты