Работа на спайдер-платворме с использованием зальцуга(иллюстрация из книги Georg Marbach, Bernard Tourte, "Alpine Caving Techniques" English Edition, 2002 ). Интересно, что в новейшей на сегодня книге (2002 год) Марбах и Турте приводят именно 4-опорную спайдер-платформу, заведомо менее удобную, чем 3-опорные. Вот что они пишут:
" Спайдер-платформы (с французского Araignee - паук, прим. КБС) имеют преимущество, позволяя более высокий доступ (1,85 - 2 м) и это экономит время. Недостатком их является то, что их труднее доставлять, устанавливать и использовать, и их вес может вскоре стать важным фактором: не менее 1500 г. В работе спайдер подвешивается под углом 45 градусов, поэтому может быть установлен только на кольцевые планки или те, которые выдерживают такие нагрузки";.
На обеих иллюстрациях обращает на себя внимание то, что угол прикрепления спайдера к закреплению вызывает преимущественную нагрузку на вырывание крюка - почти под 90 градусов к стене. Если это не просто неудачный рисунок, то такая подвеска не способствует безопасности. При всем стремлении к увеличению шага надо помнить, что угол подвески не должен превышать 45 градусов по отношению к скале, чтобы снизить вырывающую нагрузку на крюк.
В основе любого спайдера лежит платформа для ног в сочетании с короткой штангой-шестом, длиной порядка 1,2 м. В варианте на Рис.40-1 вершина шеста и сошки-упоры снабжены острыми наконечниками для лучшего сцепления со скалой. Все три упора соединены между собой и с шестом статичными тросиками, причем точка крепления тросов к шесту подвижная, что дает возможность устанавливать все 4 точки опоры на скалу при разном уклоне шеста. Для этого шест и сошки должны быть соединены шарнирно, чтобы иметь возможность изменять угол наклона шеста по отношению к площадке с упорами. Однако 4-опорная спайдер-платформа имеет явные недостатки. Прежде всего, из-за сложности установить 4 точки на плоскость без зазора хотя бы одной из них. Кроме того, треугольная опорная площадка не слишком удобна для ног.
В отличие от стула трехногая табуретка никогда не качается. Именно это соображение привело к отказу от дополнительной опоры и возникновению спайдер-платформ, имеющих только 3 точки контакта со скалой. Однако в первом варианте такого спайдера (Рис.40-2) живучесть конструкции обеспечивалась только прочностью Т-образного соединения шеста и сошек, что весьма трудно достижимо при малых диаметрах тонкостенных трубочек, идущих на изготовление платформы.
6.3. Спайдер-платформа Рокура
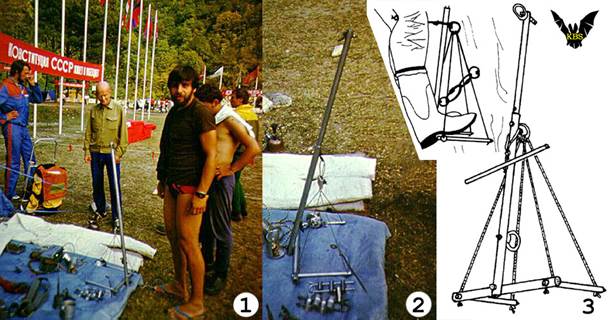
Наиболее удачной конструкцией спайдер-платформы стало изобретение Жан-Луиса Рокура (Jean Louis Rocourt). В 1974 году Рокур описал спайдер-платформу, до сих пор актуальную для серьезных восхождений в пещерах. Помимо действительно рабочих данных, своей популярностью конструкция обязана тем, что ее какое-то время производил известный Фернанд Петцль в начале дейтельности созданной им формы. В 1980 году спайдер Рокура получает подробное описание в "Техниках Альпийской Спелеологии" (Marbach, G. and Rocourt, J.-L., Techniques de la Speleologie Alpine, Techniques Sportives Appliquees, Choranche, 1980).
Рис.41. Спайдер-платформа Рокура: 1 - В.М.Абалаков (на заднем плане в военной рубашке) на выставке снаряжения Всесоюзных соревноваий по спелеотехнике, Абхазия, 1984 год.
|