СРЕДСТВА ПОВЫШЕНИЯ СТАТИЧЕСКОЙ И ДИНАМИЧЕСКОЙ УСТОЙЧИВОСТИСредства повышения статической устойчивости Одним из эффективных средств повышения статической устойчивости является применение АРВ генераторов (см. гл. 5). На рис. 9.4 показаны сравнительные угловые характеристики электропередачи без автоматического регулирования возбуждения генераторов (характеристика /) и с автоматическим регулированием (характеристика //). При действии устройств АРВ генераторов электростанции угловая характеристика видоизменяется: максимум характеристики смещается в область значений углов б, больших 90°. Эффективными средствами повышения устойчивости являются все виды АПВ (см. гл. 2). Если указанные выше средства не обеспечивают 4еобходимого запаса устойчивости, то применяется ограничение мощности, передаваемой в приемную часть энергосистемы, путем разгрузки турбин через нх системы регулирования или. отключения части генераторов в передающей части энергосистемы [23].. Отключение используется и как средство для повышения динамической устойчивости. Для повышения эффективности ограничения мощности генераторов оно выполняется совместно с делением передающей части энергосистемы (электростанции) на две асинхронно работающие' части. Чтобы исключить нежелательное снижение частоты.Ы энергосистеме, ограниче Средства повышения динамической устойчивости Кардинальным средством повышения динамической устойчивости при КЗ является снижение его длительности применением более быстродействующих защит и выключателей [8]. Эффективность этого средства показана на рис. 9.5. Точками 3 и 3' обозначены моменты отключения КЗ при различной его длительности. Ускоренное отключение КЗ в точке 3' ограничивает площадку ускорения характеристикой Р»ь характеристикой II и ординатами .t~i и 3'—4'. Форсировка возбуждения также способствует повышению устойчивости. На рис. 9.5 показано ее влияние.
Действуя во время КЗ, она повышает ЭДС генераторов и напряжение на шинах электростанции, что приводит к уменьшению сброса электрической мощности. Угловая характеристика, соответствующая режиму КЗ, занимает положение //', площадка ускорения уменьшается: она ограничивается линиями Ptu II' и ординатами 1—2' и 3 — 4. Форсировка возбуждения может быть полезной и после отключения КЗ. В этом случае она способствует увеличению площадки торможения. Автоматическое повторное включение линии как средство повышения динамической устойчивости может быть эффективным, если время бестоковой паузы АПВ меньше времени, за которое угол б достигает критического значения. В этих условиях успешное АПВ увеличивает площадку торможения и тем самым ограничивает1 увеличение угла б (см. рис. 9.3,6). Практически указанный эффект может быть получен от применения устройства быстродействующего АПВ (БАПВ) с временем бестоковой паузы не более 0,3—0,5 с. Отключение части генераторов применяется та электростанциях передающей части энергосистемы. Эффективность этого средства иллюстрируется рис. 95. Отключение генераторов общей мощностью Р0,т в момент времени, соответствующий точке 5, приводит к снижению мощности турбин от исходного значения •Pti ДоРтг, а следовательно, к увеличению максимальной площадки торможения. Одновременно происходит увеличение критического угла от бия до бдо. Положение точки 5 зависит от времени действия устройства автоматики и времени отключения выключателей генераторов. Как видно из рисунка, максимальное значение угла 6 в переходной процессе (точка 6) не превышает критического значения бКрг- Динамическая устойчивость не нарушается. Новый режим устанавливается в точке 7, характеризующейся равенством мощности турбин Рц и электрической мощности, передаваемой в энергосистему по оставшейся в работе линии. Кратковременная импульсная разгрузка тепловых турбин может оказаться достаточной для сохранения динамической устойчивости. После затухания переходного процесса мощность, турбин может бить восстановлена. Импульсная разгрузка турбин предусматривается на энергоблоках большой мощности тепловых электростанций. Импульсная разгрузка на ГЭС не применяется, так как она неэффективна из-за медленнодействующей системы регулирования частоты вращения гидравлических турбин. Для выполнения импульсной разгрузки тепловые турбины оборудуются специальными электрогидравлическими преобразователями (ЭГП), которые преобразуют электрические сигналы устройств противоаварийной автоматики в гидравлические воздействия на систему регулирования частоты вращения. Электрогидравлический преобразователь обеспечивает быстрый ввод в систему регулирования сигнала разгрузки. После снятия сигнала разгрузки система регулирования восстанавливает мощность турбины до первоначального значения. На jmc. 9.6, а показано изменение мощности турбины во |?времени при импульсном воздействии на систему регулирования турбины через ЭГП. Глубина и скорость разгрузки зависят от параметров регулирующего импульса— амплитуды А и длительности импульса ta (рис. ffi.6,б). Характеристики 1 и 2 соответствуют импульсам различной амплитуды или длительности. Чем больше \ амплитуда и длительность импульса, тем быстрее и глубже снижение мощности турбины, Снижение мощности
турбины начинается с запаздыванием 0,15—0,2 с, обусловленным инерционностью элементов гидравлической системы регулирования и наличием паровых объемов перед турбиной. Минимальное значение мощности достигается через 0,5—0,7 с после подачи импульса регулирования. Для сохранения статической устойчивости послеаварийного режима воздействие через ЭГП дополняется воздействием на ограничение мощности турбин через механизм управления турбины (МУТ) (см. § 7.2). Характеристика 3 на рис. 9.6, а показывает изменение мощности турбины при ее разгрузке через ЭГП и МУТ. В установившемся послеаварийном режиме мощность турбины Рч2 меньше мощности турбины исходного режима РтЬ Импульс регулирования (рис. 9.6,6) показан в виде отрицательного сигнала (сигнала на уменьшение мощности) с экспоненциальным затуханием, характеризующимся постоянной времени т. Экспоненциальный съем сигнала создает замедление в наборе мощности турбиной и предотвращает нарушение устойчивости во втором цикле качаний [19]. 9.4. УСТРОЙСТВА ПА ДЛЯ ПРЕДОТВРАЩЕНИЯ НАРУШЕНИЯ УСТОЙЧИВОСТИ Структура устройств. В настоящее время в качестве основной принята централизованная система противоаварийного управления, включающая в себя комплекс устройств, предназначенных для предотвращения нарушения устойчивости в районе противоаварийного управления [23]. На рис. 9.7 показан пример упрощенной структурной схемы централизованной системы противоаварийной автоматики. Независимо от конфигурации района противоаварийного управления, or вида возмущений, на которые реагируют устройства, от используемых средств повышения устойчивости система ПА содержит следующие взаимосвязанные основные устройства. 1. Пусковые органы (ПО) выявляют аварийные возмущения в энергосистеме или переходные про-
цессы, опасные для устойчивости, а также тяжесть этих возмущений. Тяжесть КЗ, например, оценивается его видом, длительностью, значением сброса активной мощности или снижением напряжения. При срабатывании пусковых органов на их выходах появляются сигналы А, которые используются другими устройствами ПА для формирования сигналов управляющих воздействий. Пусковые органы размещаются на объектах, где фиксируются аварийные возмущения. 2. Измерительные органы (ИО) осуществляют измерение параметров исходного режима энергосистемы (перетоков мощности по линиям электропередачи, загрузки генераторов электростанций и т. п.) и дают информацию об исходной схеме сети (о включенном или отключенном состоянии линий электропередачи и других элементов энергосистемы). Эта информация характеризует напряженность исходного режима и используется для работы устройства автоматической дозировки управляющих воздействий (АДВ). 3. Устройство АДВ определяет для каждого возмущения, фиксируемого соответствующим пусковым органом, интенсивность управляющих воздействий, необходимую для сохранения устойчивости параллельной работы. Оно является центральным устройством НА в районе противоаварийного укрепления. Устройство АДВ получает информацию от измерительных органов (сигналы И, С) и подготавливает управляющие воздействия. Устройство АДВ является логико-вычислительным устройством. Оно может быть выполнено с применением релейных логических элементов или ЭВМ. В последнем случае рассчитанные в устройстве АДВ значения управляющих воздействий запоминаются в отдельном устройстве автоматического запоминания дозировки (АЗД). Устройство АЗД устанавливается в месте установки АДВ или в местах реализации управляющих воздействий, например на электростанции ЭС2. Устройство 1*"АЗД по сигналам настройки Н подготавливает в исходном режиме цепи для прохождения аварийных сигналов [JTO на электростанции ЭС2. Применение вынесенных устройств АЗД (по отношению к месту установки устрой ства АДВ) обеспечивает повышение быстродействия I, надежности противоаварийного управления. 4. Исполнительные устройства (ИУ) реализуют сформированные устройством АДВ управляющие воздействия. 5. Устройства телепередачи сигналов автоматики (ТСА) обеспечивают связь и взаимодействие между собой отдельных устройств системы ПА. С помощью устройств ТСА осуществляется телепередача следующих сигналов: аварийных сигналов, передаваемых от ПО к АДВ или к АЗД; сигналов управляющих воздействий, передаваемых от АДВ или от АЗД к ИУ; информации об исходном режиме и схеме сети, передаваемой от ИО к АДВ; сигналов настройки вынесенных устройств АЗД, передаваемых от АДВ к АЗД; сигналов контроля положения элементов устройств АЗД, передаваемых от АЗД к АДВ. Сигналы пусковых органов и сигналы управляющих воздействий составляют аварийную информацию. Она должна передаваться по возможности быстро, без задержки. Для этой цели используется аппаратура быстродействующей телепередачи сигналов (см. § 9.5). Остальные сигналы составляют доаварийную информацию. Эта информация передается непрерывно с помощью различных устройств телемеханики. Схемы пусковых органов устройств ПА В зависимости от вида аварийных возмущений в энергосистеме применяют различные пусковые органы [2, 23, 31]. Пусковой орган (ПО), фиксирующий отключение линии электропередачи по положению ее выключателей [32], срабатывает при отключении линии тремя фазами по любой причине. Пусковыми элементами устройства являются контакты реле блокировки от многократного включения трех фаз KBS.A, KBS.B, KBS.C и реле положения «Отключено» трех фаз KQT.A, KQT.B, KQT.C из схемы управления выключателем (рис. 9.8, катушки указанных реле на схеме не показаны). Схема составлена в предположении пофазного управления выключателем Q1. Использование реле KBS обеспечивает срабатывание пускового органа еще до отключения выключателя линии, чем обеспечивается ускорение действия ПА. Для получения сигнала об отключении выключателя в тече-
ние всего времени, пока он отключен, параллельно контактам реле i\BS включены контакты соответствующих реле KQT. Быстродействующее промежуточное реле К.Ы, двухпозиционное промежуточное рели KL2 и промежуточное реле KL3, имеющее задержку при возврате, используются для формирования выходного сигнала. Двухпозиционное промежуточное реле KL2 предназначено для фиксации отключенного положения выключателя, выведенного в ремонт, когда может быть снято напряжение оперативного тока в цепях управления выключателем. Реле K.L2 возвращается в исходное положение после включения выключателя и последующего срабатывания реле положения «Включено» KQC.A, KQC.B, KQC.C отдельных фаз. Положение контактов реле KL2, показанное на рис. 9.8, соответствует включенному положению выключателя. Промежуточное реле KL3 обеспечивает ограничение по времени выходного сигнала. Для -фиксации вывода линии в ремонт предусмотрено реле времени К.Т1, выдержка времени на котором принимается больше времени АПВ линии. С помощью реле К.Т1 осуществляется перестройка устройства АДВ, в результате которой изменяется дозировка управляющих воздействий. Когда выключатель выведен в ремонт, реле KQT и KQC могут находиться в произвольном положении. Чтобы сигнал об отключении выключателя не исчезал, предусмотрен переключатель режима SAC. В нормальном режиме переключатель SAC установлен в положении А (автоматическая фиксация). При выводе выключателя в ремонт переключатель SAC следует установить в положение Р (ремонт). Предусмотрена предупредительная сигнализация, указывающая на необходимость установить переключатель в соответствующее положение, которая построена на принципе несоответствия положения переключателя SAC, выключателя Q1 и его разъединителей QS1 и QS2. Для образования цепей несоответствия используются контакты реле фиксации положения выключателя отдельных фаз KQ-A, KQ.B, KQC, срабатывающих при отключении выключателя (катушки этих реле на схеме не показаны), и вспомогательные контакты разъединителей QS1 и QS2. Правильная операция с переключателем SAC приводит к снятию предупредительной сигнализации. Недостатком данного пускового органа является возможность его неправильного срабатывания при неправильных действиях персонала с переключателем. Применяются пусковые органы фиксации отключения линии без переключателя режима SAC. В них ремонтное состояние" выключателя фиксируется не только с помощью реле положения выключателя Q1, но также с помощью реле положения разъединителей QS1 и QS2. Поэтому при выводе выключателя в ремонт никаких ручных операций в пусковом органе не требуется. Схема пускового органа при двух линейных выключателях аналогична рассмотренной. Предусматриваются элементы пускового органа для каждого из выключателей. Реле КТ1 и KL3 являются общими для обоих выключателей. Выходная цепь создается путем последовательного включения групп контактов KL1.1 и KL2.3, относящихся к двум выключателям. Указанные пусковые органы, как правило, устанавливаются на двух сторонах линии, что позволяет фиксировать одностороннее отключение линии.
Устройство автоматической дозировки управляющих воздействий Наибольшее распространение получили устройства АДВ, которые определяют интенсивность управляющих воздействий в исходном режиме до возникновения аварии для каждого из фиксируемых пусковыми органами аварийных возмущений. На рис. 9.9 в качестве примера показаны зависимости мощности отключаемых генераторов Р0,г от одного параметра — мощности, передаваемой по линии электропередачи в исходном режиме, Рисх для двух пусковых
органов (характеристики / и 2) при неизменных остальных параметрах энергосистемы. Эти характеристики можно построить по результатам расчетов устойчивости. Точки пересечения характеристик с осью РиСх определяют пределы передаваемой мощности, при которых расчетные повреждения не требуют отключения генераторов для сохранения устойчивости. При больших значениях передаваемой мощности для сохранения устойчивости требуется ограничение мощности на определенное значение. Наиболее простой вариант устройства АДВ выполняется с помощью дискретных (релейных) элементов. Изменение мощности РИсх фиксируется с помощью нескольких реле активной мощности, настроенных на различные мощности срабатывания. Диапазон мощности, в котором работают реле, ограничен значениями PnOxi и максимально возможной передаваемой мощностью Люр.тах- Каждой ступени исходной мощности соответствует определенная мощность отключаемых генераторов. Таким образом, расчетные характеристики /и 2 с помощью аналого-релейного преобразователя (АРП) аппроксимируются в ступенчатые характеристики 1' и 2'. Значения мощности срабатывания ступеней РпСх определены по значениям мощностей отключаемых генераторов. Чем больше число ступеней Р0,г и РИСх, тем точнее аппроксимация. Одно из требований, предъявляемых к АРП, состоит в том, чтобы он фиксировал («запоминал») в течение некоторого времени значение активной мощности, передаваемой в предшествующем повреждению режиме. Ступени. АРП не должны срабатывать при кратковременном увеличении мощности и не должны возвращаться в исходное положение при кратковременном снижении мощности, что может иметь место при КЗ и качаниях. Упрощенная* схема устройства АДВ на два пусковых органа ПО1 и ПО2 показана на рис. 9.10. Устройство АДВ дозирует мощность отключаемых генераторов только в зависимости от одного параметра — передаваемой мощности. Устройство реализует характеристики рис. 9.9. Аналого-релейный преобразователь содержит шесть реле активной мощности KW1 — KW6 и соответственно шесть выходных реле KL1 — KL6. Реле мощности с большим номером настроены на большую мощность срабатывания. Контакты выходных реле используются для создания ступеней дозировки мощности отключаемых генераторов. Для настройки устройства на требуемую ступень отключения генераторов предусмотрен шинный коммутатор SC, который представляет собой коммутационное поле, состоящее из ряда горизонтальных и вертикальных шинок. К горизонтальным шинкам подключаются цепи контактов выходных реле АРП, вертикальные шинки являются входными цепями исполнительного устройства. Каждая горизонтальная шинка может быть соединена электрически с любой вертикальной. Для этого нужно вставить штырь контактного разъема в гнездо на пересечении шинок (на рис. 9.10, в штыри контактного разъема условно показаны в виде стрелок). В штыри контактного разъема встроены диоды VD (рис. 9.10,г), исключающие образование обходных цепей (разделяю-
щие цепи дозировки различных пусковых органов). Недостаток 'устройства АДВ в релейном исполнении состоит в том, что оно определяет значения управляющих воздействий с погрешностью, обусловленной ступенчатостью аппроксимирующей характеристики. Если значение управляющих воздействий зависит не от одного, а от большого числа параметров энергосистемы и если требуется определять значения управляющих воздействий для большого числа пусковых органов, то и устройства АДВ, использующие релейные элементы, становятся сложными и громоздкими. В этих условиях целесообразно в качестве устройства АДВ использовать мини-ЭВМ, которые начинают внедряться в энергосистемах £34]. Исполнительные устройства ПА На рис. 9.11 в качестве примера рассматривается устройство отключения генераторов, разработанное инсти-
тутом «Энергосетьпроект» [23]. Устройство состоит из трех основных блоков (рис. 9.11,а): измерения мощности генератора в исходном режиме Рг,иох, автоматического определения числа отключаемых генераторов БОЧ, установки очередности отключения генераторов БУО. В устройстве решаются две задачи: первая состоите определении числа отключаемых генераторов по,Т по заданной устройством.АДВ мощности Р0,т и мощности загрузки генераторов Рг,исх, вторая — в определении очередности отключения генераторов. Число отключаемых генераторов зависит от мощности загрузки каждого отключаемого генератора. С целью упрощения устройство выполнено в предположении одинаковой загрузки всех генераторов, что является достаточно вероятным, особенно на ГЭС с однотипными генераторами. В этих условиях достаточно измерять мощность одного генератора (рис. 9.11,6). Число отключаемых генераторов можно определить по формуле
Так как величина Р0,г, поступающая на вход устройства, может принимать одно из нескольких заранее известных значений, зависимость (9.6) приобретает вид семейства гипербол (рис. 9.12).
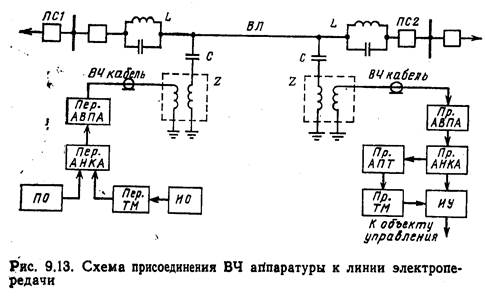
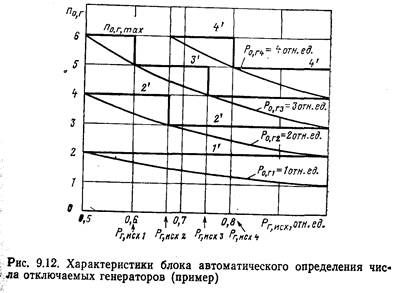
Поскольку число отключаемых генераторов может быть только целым, то измерение мощности генератора может производиться также дискретно с помощью реле активной мощности, включенных на трансформаторы тока и напряжения измеряемого генератора. Схема аналого-релейного преобразователя мощности Рг,исх аналогична схемам на рис. 9.10, а, б. Чтобы погрешность от дискретности фиксации Рг,исх не проявлялась, число ступеней Рг,исх должно приниматься равным общему числу пересечений горизонтальных линий числа по,г с гиперболами. Для рассматриваемого примера достаточно использовать четыре реле активной мощности, настроенных на мощности срабатывания соответственно 0,6; 0,67; 0,75; 0,8 отн. ед. Значения мощности 0,5 и 1,0 отн. ед. можно не фиксировать. Принимается, что генераторы несут нагрузку по 0,5 отн. ед., если ни одно из реле не срабатывает. Реле с мощностью срабатывания < 1,0 отн. ед. также не требуется, так как режим с загрузкой более Рг.ном маловероятен. л Таким образом, непрерывные расчетные характеристики устройства аппроксимируются ступенчатыми, обозначенными на рис. 9.12 соответственно V — 4'. Причем аппроксимация выполняется таким образом, чтобы реальное число отключаемых генераторов было равно или больше расчетного. Ступень отключаемой мощности /\>,гь как видно из графика, независимо от загрузки генераторов требует отключения двух генераторов. Блок БОЧ (рис. 9.11, в) представляет собой совокупность контактных цепей выходных реле ступеней Рг,Исх) которые связывают между собой шинки величины Р0>г с шинками По,т, причем каждому значению Р0,г и Рг,исх соответствует определенное значение по,г. Блок установки очередности отключения генераторов БУО выполнен в виде шинного коммутатора SC. К вертикальным шинкам коммутатора подключены выходные цепи БОЧ, к горизонтальным шинкам — промежуточные реле KL1—KL8, осуществляющие отключение генераторов. Очередность отключения устанавливается персоналом в зависимости от состояния и технологических особенностей генераторов с помощью штекеров, связывающих шинки яо,г с соответствующими выходными реле. Каждая шинка по,г связана с одним выходным реле. Для того чтобы при подаче напряжения на любую шинку no,v отключалось требуемое число генераторов, предусмотрен диодный спуск VD1 — VD5 на шинки с меньшим номером. На рис. 9.11, в показана следующая очередность:. П, ГЗ, Г5, Г7, Г2, Г4, т.е. если блок БОЧ подал напряжение на шинку 3, то будут отключены генераторы П, ГЗ и Г5. В данной настройке генераторы Г6 и Г8 не отключаются. 9.5. УСТРОЙСТВО ТЕЛЕПЕРЕДАЧИ АВАРИЙНЫХ СИГНАЛОВ АВТОМАТИКИ (ТСА) Для телепередачи информации о срабатывании пусковых органов, команд управления и других аварийных сигналов ПА широкое применение получила аппаратура высокочастотного (ВЧ) телеотключения типа ВЧТО-М, обеспечивающая передачу до пяти сигналов по высокочастотному каналу связи, образованному линией электропередачи [33]. Новый комплекс аппаратуры для телепередачи аварийных сигналов автоматики включает в себя: аппаратуру низкочастотных каналов автоматики типа АНКА, предназначенную для образования низкочастотных сигналов автоматики; высокочастотную аппаратуру типа АВПА (аппаратура высокочастотная для противоаварийной автоматики)', предназначенную для преобразования низкочастотных сигналов аппаратуры АНКА в высокочастотные. Этот комплекс аппаратуры, так же как и аппаратура ВЧТО-М, обеспечивает передачу сигналов по ВЧ каналу, образованному линией электропередачи. Схема подключения -аппаратуры к воздушной линии ВЛ электропередачи показана на рис. 9.13. На передающем пункте ПС1 устанавливаются передатчики аппаратуры АНКА и АВПА, осуществляющие передачу сигналов пусковых органов ПО. На приемном пункте ПС2 с помощью приемников АВПА и АНКА осуществляются прием переданных сигналов и реализация их в исполнительном устройстве ИУ. Если в качестве канала связи используется специальная проводная линия связи (кабель связи), то для передачи сигналов автоматики достаточно использование одной аппаратуры АНКА. В этом состоит преимущество
аздельного исполнения тональной части и ВЧ части аппаратуры. В аппаратуре типа ВЧТО-М эти части совмещены в одном устройстве. Аппаратура АНКА предназначена для преобразования дискретных сигналов автоматики, сигналов телемеханики или фазы напряжения промышленной частоты в частотно-модулированные сигналы низкой частоты в передатчике и для обратного преобразования этих сигналов и приемнике. Имеются две модификации аппаратуры: АНКА-14 —для передачи и приема 14 сигналов и АНКА-4 — для передачи и приема четырех сигналов автоматики. Для передачи сигналов телемеханики на приемном и передающем пунктах должна использоваться соответствующая аппаратура телемеханики (аппаратура ТМ на рис. 9.13). Кроме того, на приемном пункте дополнительно должен использоваться приемник аппаратуры передачи телеинформации АПТ, предназначенный для преобразования частотно-модулированных колебаний сигналов телемеханики в посылки постоянного тока, используемые далее в приемнике телемеханики. Передача аварийных сигналов автоматики осуществляется одночастотным импульсным кодом, т. е. каждому сигналу автоматики соответствует импульс определенной частоты. В режиме покоя (при отсутствии аварийных сигналов) генератор частоты непрерывно вырабатывает контрольную частоту. При передаче контрольной частоты непрерывно осуществляется контроль исправности канала связи, чем обеспечивается готовность аппаратуры для передачи аварийных сигналов. При подаче на вход передатчика рабочих сигналов автоматики передача контрольной частоты прекращается и осуществляется передача соответствующих частот сигналов автоматики. Минимальное время передачи одного сигнала с момента подачи управляющего сигнала на вход передатчика до момента срабатывания выходного реле приемника не превышает 20 мс (при отключенном устройстве задержки в приемнике). Передатчик АНКА позволяет передавать вместо сигналов ТИ—ТС фазу напряжения промышленной частоты, для чего на вход манипулятора подается напряжение промышленной частоты. Передача фазы напряжения производится также методом частотной манипуляции. Передача сигналов ТИ—ТС или фазы напряжения производится непрерывно. В случае появления аварийных сигналов автоматики передача сигналов телемеханики или фазы прерывается на время подачи аварийных сигналов, т. е. отдается предпочтение аварийным сигналам.
|
 ние мощности генераторов в передающей части энергосистемы выполняется совместно с отключением части потребителей в приемной ее части. Такое комплексное управление, являющееся наиболее эффективным средством повышения устойчивости, требует для его реализации значительных затрат на создание рассредоточенной системы автоматического отключения нагрузки>(САОН). Отключение генераторов получило наиболее широкое применение на ГЭС, так как обратное включение гидрогенераторов может быть выполнено за относительно небольшое время.
ние мощности генераторов в передающей части энергосистемы выполняется совместно с отключением части потребителей в приемной ее части. Такое комплексное управление, являющееся наиболее эффективным средством повышения устойчивости, требует для его реализации значительных затрат на создание рассредоточенной системы автоматического отключения нагрузки>(САОН). Отключение генераторов получило наиболее широкое применение на ГЭС, так как обратное включение гидрогенераторов может быть выполнено за относительно небольшое время.







 В качестве примера рассмотрено устройство, устанавливаемое на электростанции, имеющей восемь генераторов. Число ступеней Р0,г, создаваемое устройством АДВ, равно четырем, причем значения Р0,г соответственно равны в относительных единицах 1, 2, 3, 4. За одну относительную единицу принята номинальная мощность генератора. Минимальная загрузка генератора принята равной 0,5 Рг.ном, максимальное число генераторов, которое может быть отключено, — шести.
В качестве примера рассмотрено устройство, устанавливаемое на электростанции, имеющей восемь генераторов. Число ступеней Р0,г, создаваемое устройством АДВ, равно четырем, причем значения Р0,г соответственно равны в относительных единицах 1, 2, 3, 4. За одну относительную единицу принята номинальная мощность генератора. Минимальная загрузка генератора принята равной 0,5 Рг.ном, максимальное число генераторов, которое может быть отключено, — шести.